







一阶系统用比例积分滑膜函数

仿真结果

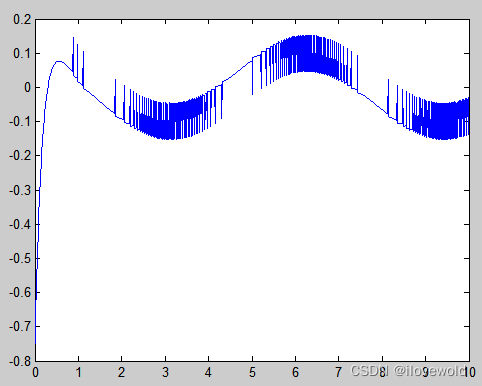

图3相轨迹
图3横坐标为积分误差纵坐标为比例误差,
滑膜面为s=0,时,e与ef的坐标构成的面。
上述仿真结果和刘金琨智能控制书中仿真结果一致。
clear all;
close all;
clc;
t=10;
ts=0.01;%ts代表时间间隔
%控制器参数
c=5;
k1=3;%%%参数符号和循环结构里循环符号要区分开来。
D=0.5;
%控制对象初始状态
x(1)=1;
dx(1)=0;
%系统参数
b=10;
for k=1:1:t/ts+1
if k==1
K=(k-1);
times(k)=K*ts;%序号k代表K*ts时刻
xd(k)=sin(K*ts);
dxd(k)=cos(K*ts);
e(k)=x(k)-xd(k);
ef(k)=0;
else
K=(k-1);
times(k)=K*ts;%序号k代表K*ts时刻
xd(k)=sin(K*ts);
dxd(k)=cos(K*ts);
e(k)=x(k)-xd(k);
ef(k)=ef(k-1)+(e(k)+e(k-1))*ts/2;
end
s(k)=e(k)+c*ef(k);
ut(k)=1/b*(-c*e(k)+dxd(k)-k1*s(k)-D*sign(s(k)));
dt(k)=0.5*sin(K*ts);%状态干扰
dx(k)=(b*ut(k)+dt(k));
x(k+1)=x(k)+dx(k)*ts;
end
x(:,end)=[];
figure(1)
plot(times,x,times,xd);
figure(2)
plot(times,ut);
figure(3)
plot(ef,e,ef,-c*ef);
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









