









目录
前言
近期学习平滑切换问题挺烦恼的,想看看控制器切换的容错控制例子,文献复现不出来,感谢刘老师的书,直接有代码以及详细解释,下面将书上的一个例子自己推导一遍并进行复现。
个人理解所谓的容错控制就是当某个系统的执行器失效,有多种解决办法,如:启动备用执行器获取进行自适应补偿控制,但是启动的过程中,你不能有太大的抖动。这里给出的仿真例子是利用滑模控制进行自适应补偿。所谓自适应控制律,便是控制律随系统故障而发生变化,而且可以自适应重组,且这里由于是但输入系统,所以为了模拟控制器容错,采用在0.5s时控制器控制力突然变化,控制器的容错反应。
1.二阶系统
![]()
如果控制发生部分损坏,即模型中的控制输入u=σu',0<σ<1。
2.控制器设计
其实就是u = δuc,δ根据自己设计需求不同时间可设定不同值(由于这里是但输入,故0<δ<1),p^为自适应律,因为滑模面是随着误差变化的,故而控制律也是自适应变化的。
定义线性滑模面:
s=c*e+e'
定义Lyapunov函数:
![]()
求导,得:
![]()
做如下定义:
![]()
从而得证控制系统稳定。
得到相应控制律和自适应为:
![]()
3.仿真分析
3.1S函数编写被控对象
扰动d(t) = 10*sin(t),b = 0.1,指令位置xd = sin(t),初始状态设定为[0.5 0]。
function [sys,x0,str,ts]=Plant(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes;
case 1,
sys=mdlDerivatives(t,x,u);
case 3,
sys=mdlOutputs(t,x,u);
case {2, 4, 9 }
sys = [];
otherwise
error(['Unhandled flag = ',num2str(flag)]);
end
function [sys,x0,str,ts]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 2;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 2;
sizes.NumInputs = 2;
sizes.DirFeedthrough = 0;
sizes.NumSampleTimes = 0;
sys=simsizes(sizes);
x0=[0.5 0];
str=[];
ts=[];
function sys=mdlDerivatives(t,x,u)
b = 0.1;
ut=u(2);%控制律
dt=u(1);%扰动
sys(1)=x(2);
sys(2)=b*ut+dt;
function sys=mdlOutputs(t,x,u)
sys = x;3.2Simulink建模
滑膜函数系数c = 15,控制器调节参数k = 5,η = 10,γ = 10,取控制器参数初值为p^ = 1,注意这里控制器存在一阶导数,所以有一个状态变量。

3.3结果分析

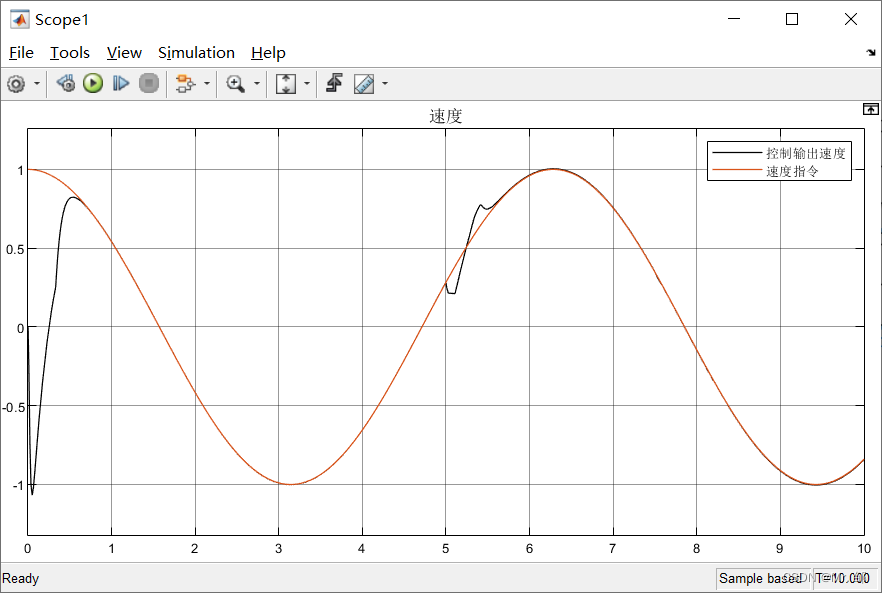
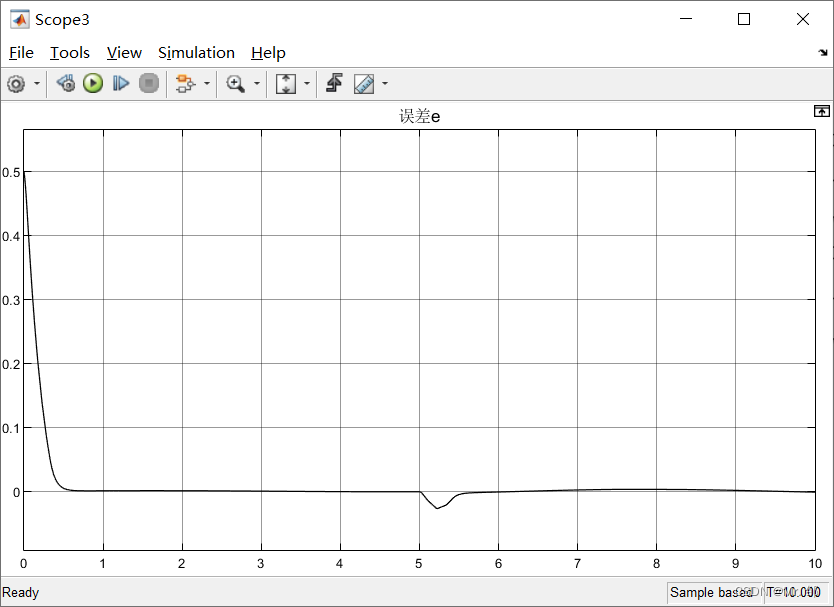
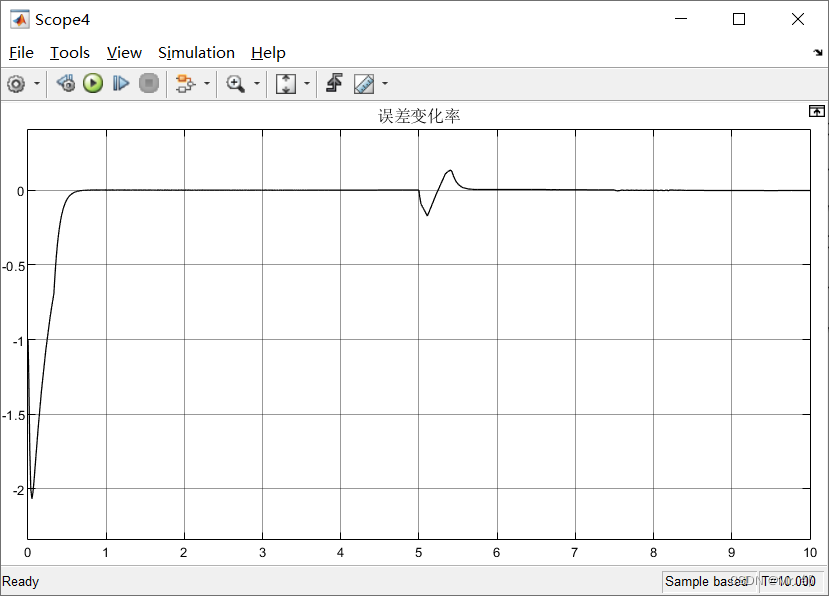
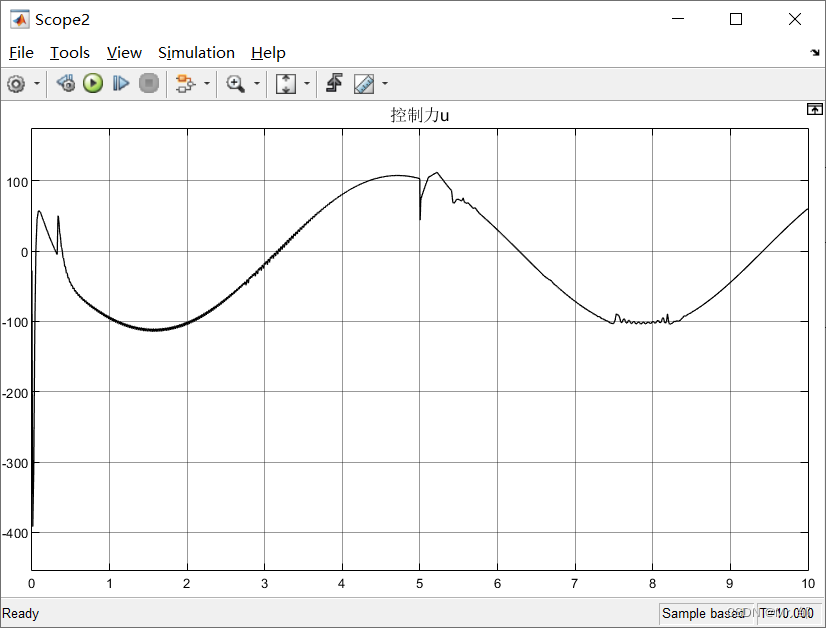
3.4结论
由于此处为单输入,即只有一个控制器,所以为了模拟容错控制器的方法,在t = 0.5s时,改变了一下系数δ,即相当于控制器“抖动”了一下,但是只有由于自适应律,使得能够快速调节控制力平滑,达到所谓的自适应补偿容错控制。
4.相轨迹绘制
绘制相轨迹首先要将误差e和误差变化律de导出到工作区间,常见的用Scope或者to workspace模块导出,这里介绍Scope模块导出绘图的方法,to workspace模块也是类似的。
4.1Scope模块导出设置
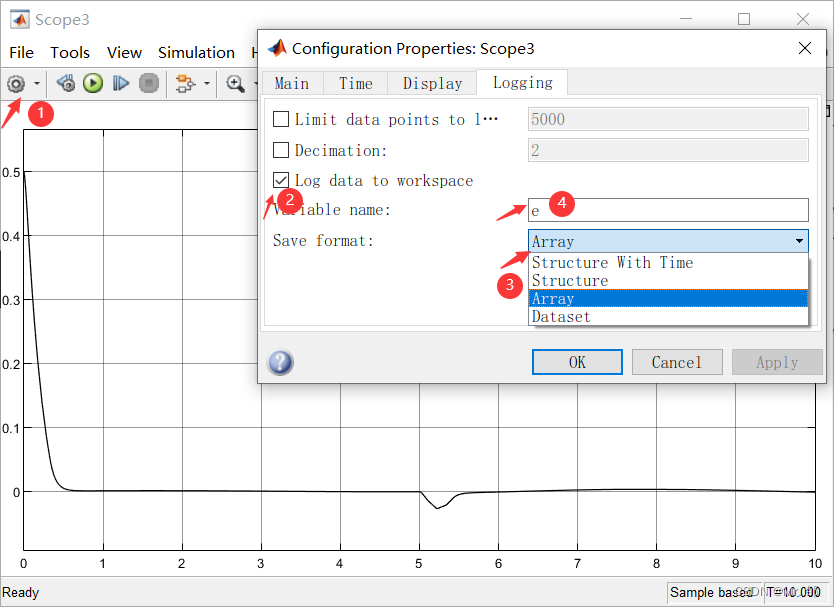
4.2模型导出数据设置

注:
①除了上述图例显示bug外;
②我发现利用Scope导出的数据只能画一遍图,画完工作区的数据便自动清除了;
③而且利用Scope的Array导数数据只能导出单变量数据。
4.3MATLAB绘制相轨迹
注由于为了图例能够区别显示,所以留下了模型导数数据设置Time前面的✔,所以第二列才是数据。
%%%相轨迹
c = 15;
e = e(:,2);de = de(:,2);
plot(e,de,'r',e,-c*e,'k','linewidth',2)
xlabel('e');ylabel('de');
legend('相轨迹','滑膜面s=0');
title('相轨迹');4.3.1从MATLAB中导出高清图
这里再介绍如何从MATLAB中导出高清图:

之后复制图窗或者保存都可以导出高清出图。

如果有帮助,麻烦帮忙点个赞是我最大的分享动力,非常感谢!
注:仅为便利自己学习,错误在所难免,如有侵权,请联系删除,有兴趣的学者可以参考学习交流,谢谢!
















 6225
6225











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











