






最近在上<<自动控制原理>>,如同听天书,在做完典型电路实物实验后,想用MATLAB做仿真看能不能实现,一方面加深对理论知识的理解,另一方面顺便学习MATLAB软件的使用。
话不多说,这就开始搭建
比例
比例环节传递函数为
G
(
s
)
=
−
z
2
z
1
=
−
R
2
R
1
\ G(s)=-\frac{z_2}{z_1}\ =-\frac{R2}{R1}\,
G(s)=−z1z2 =−R1R2
其搭建simulink过程如下
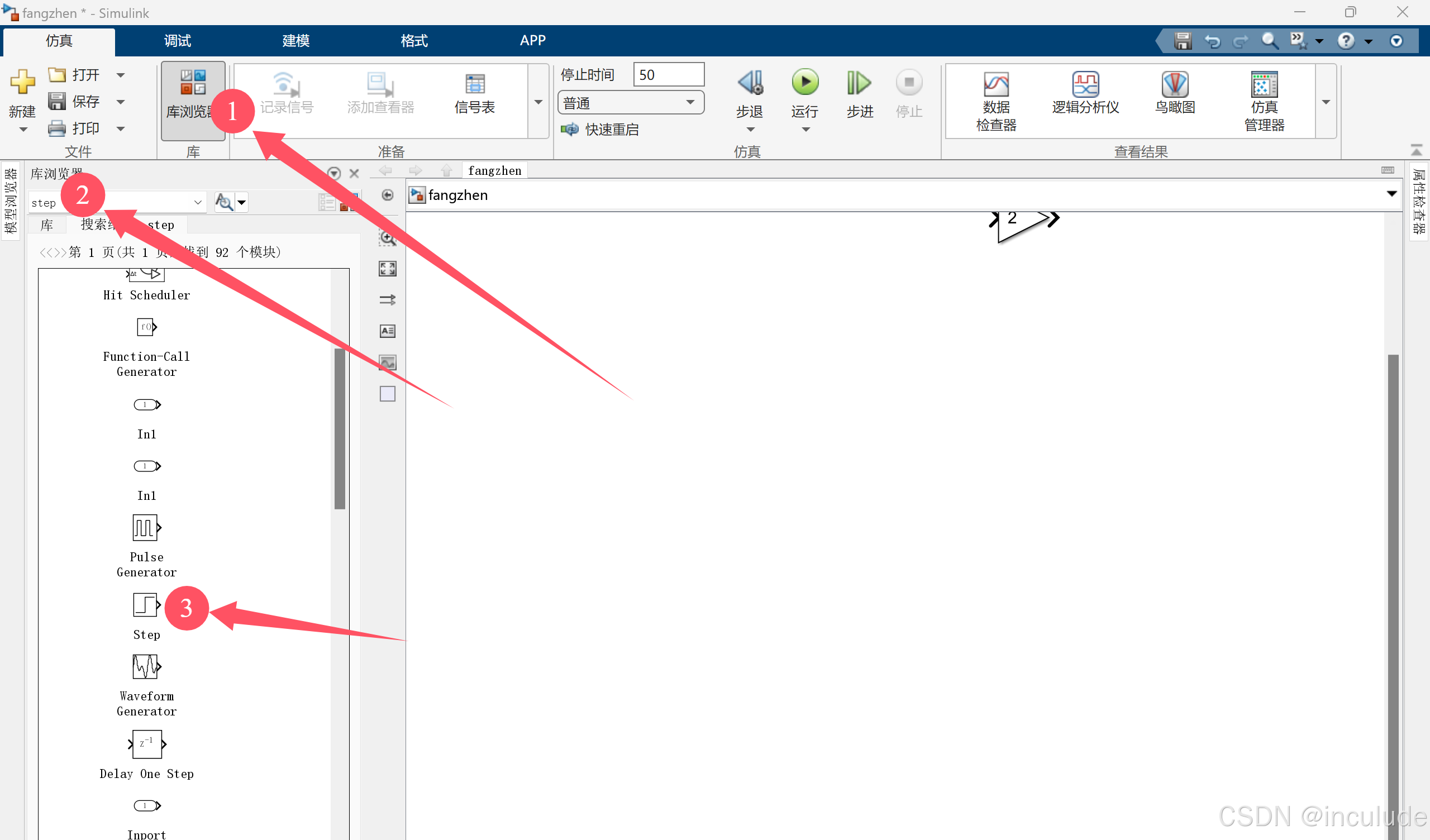
如图首先点击库浏览器,在搜索栏中搜索step,找到如③所示的阶跃信号源,长按拖动至界面里。
像这样操作依次放置一个(step)阶跃信号源,两个(gain)两个比例放大器,一个(scope)示波器。
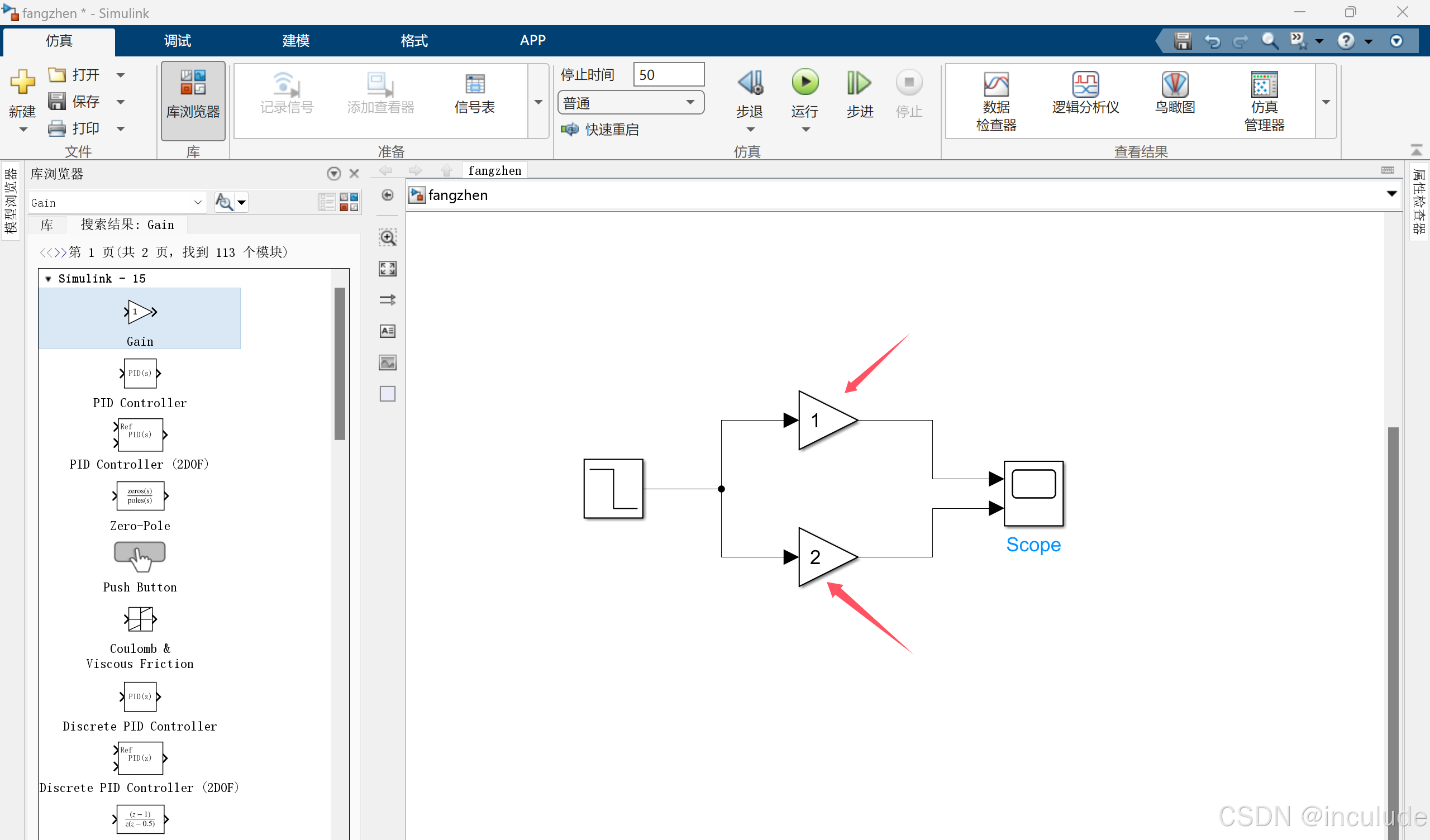
设置比例放大器的放大增益倍数,我这里设置了一个二倍,和一个一倍,也就是不放大,再用导线将其按图中所示连接。
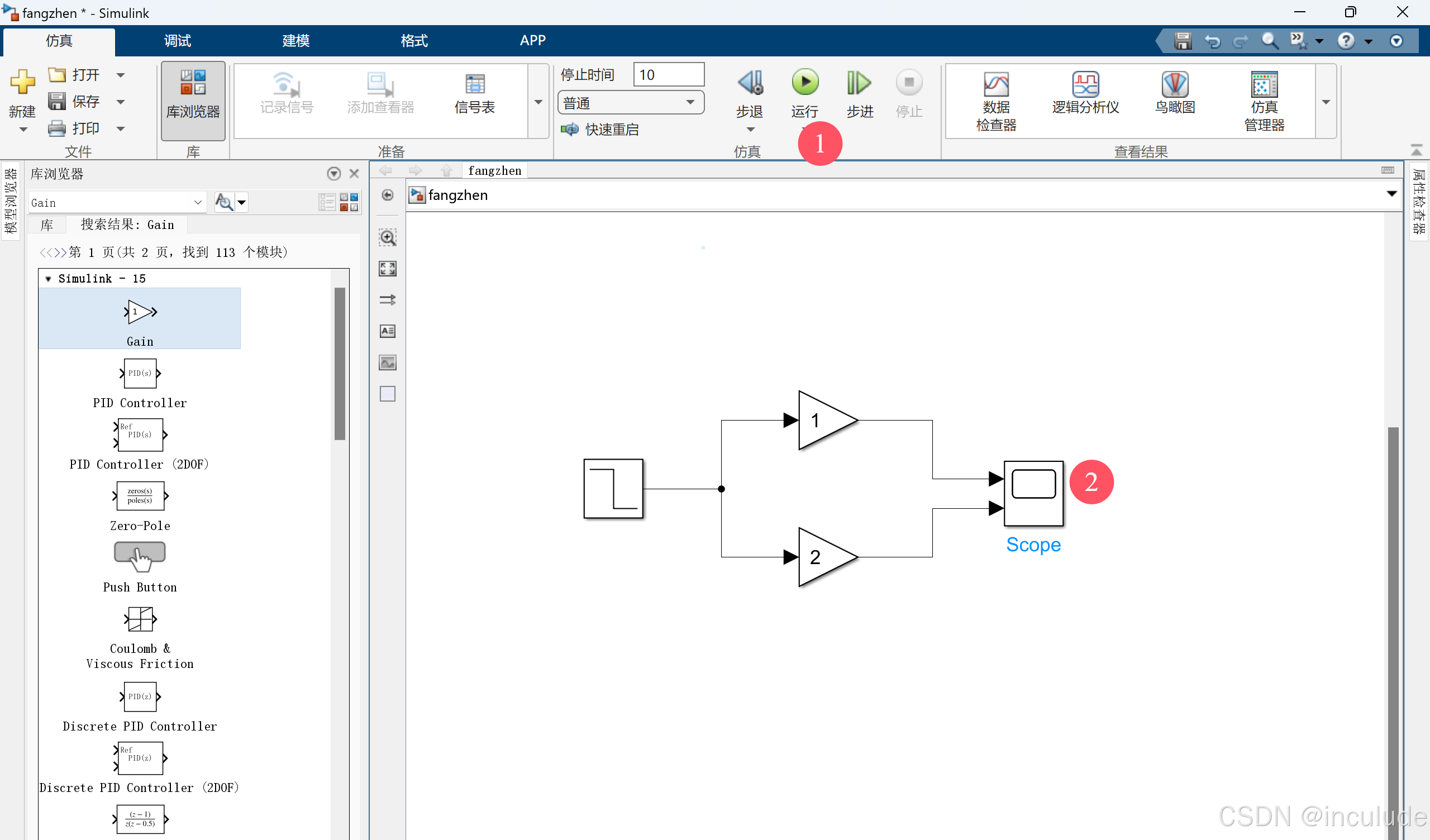
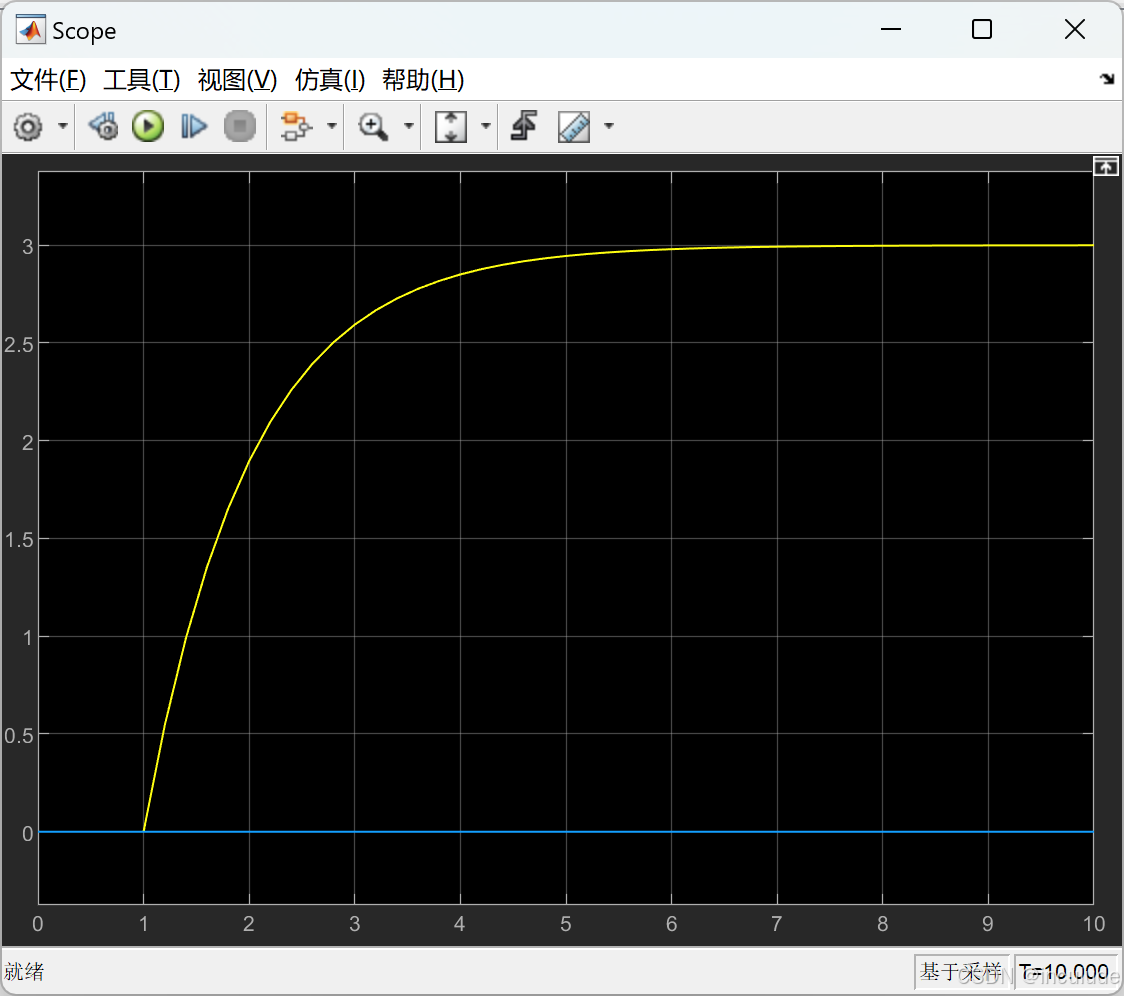
点击运行,双击示波器,现象如下图。
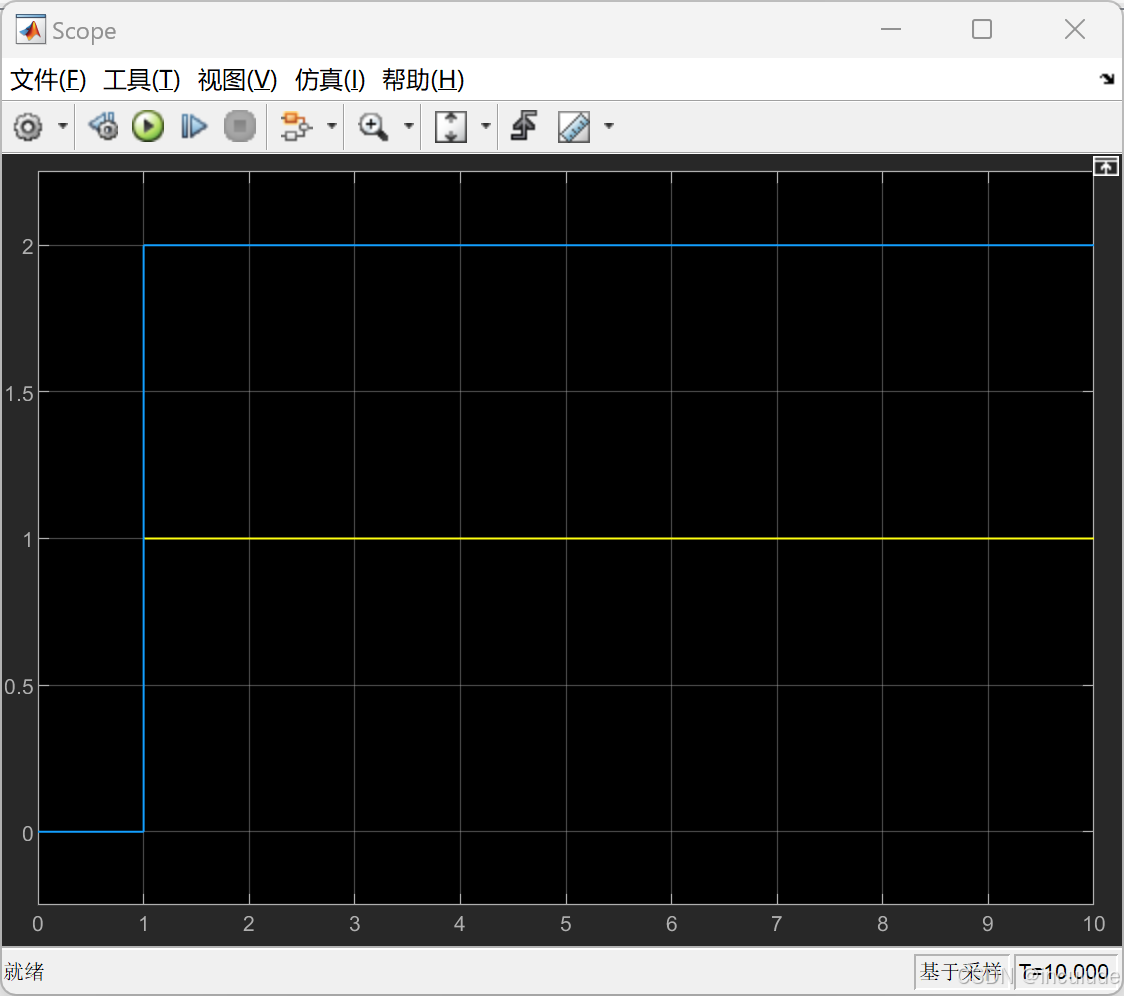
蓝色为,二倍放大增益,黄色为一倍放大增益。
惯性
惯性环节传递函数为
G
(
s
)
=
−
z
2
z
1
=
−
R
2
/
R
1
R
2
C
1
s
\ G(s)=-\frac{z_2}{z_1}\ =-\frac{R_2/R_1}{R_2C_1s}\,
G(s)=−z1z2 =−R2C1sR2/R1
其搭建simulink过程如下
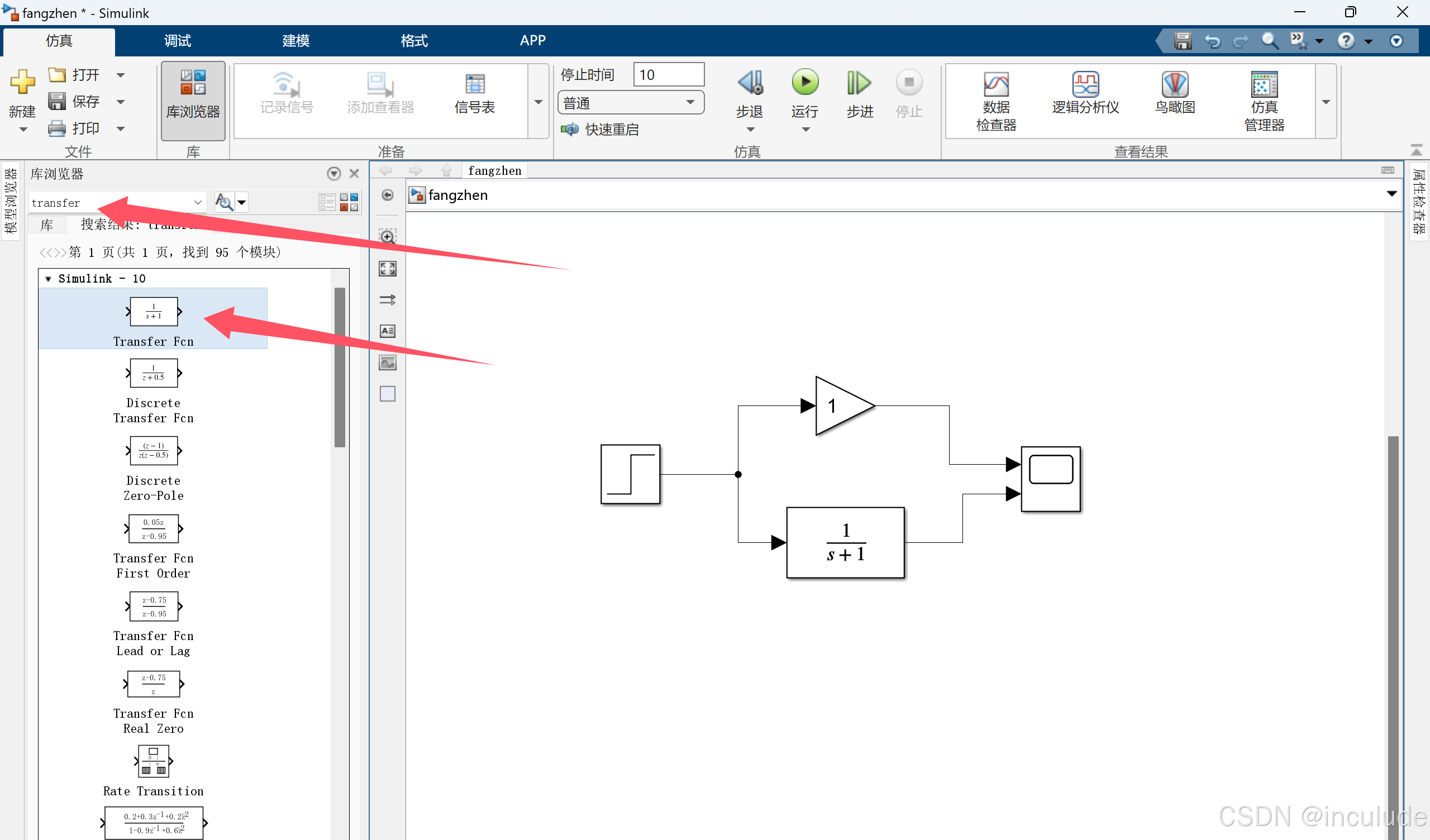
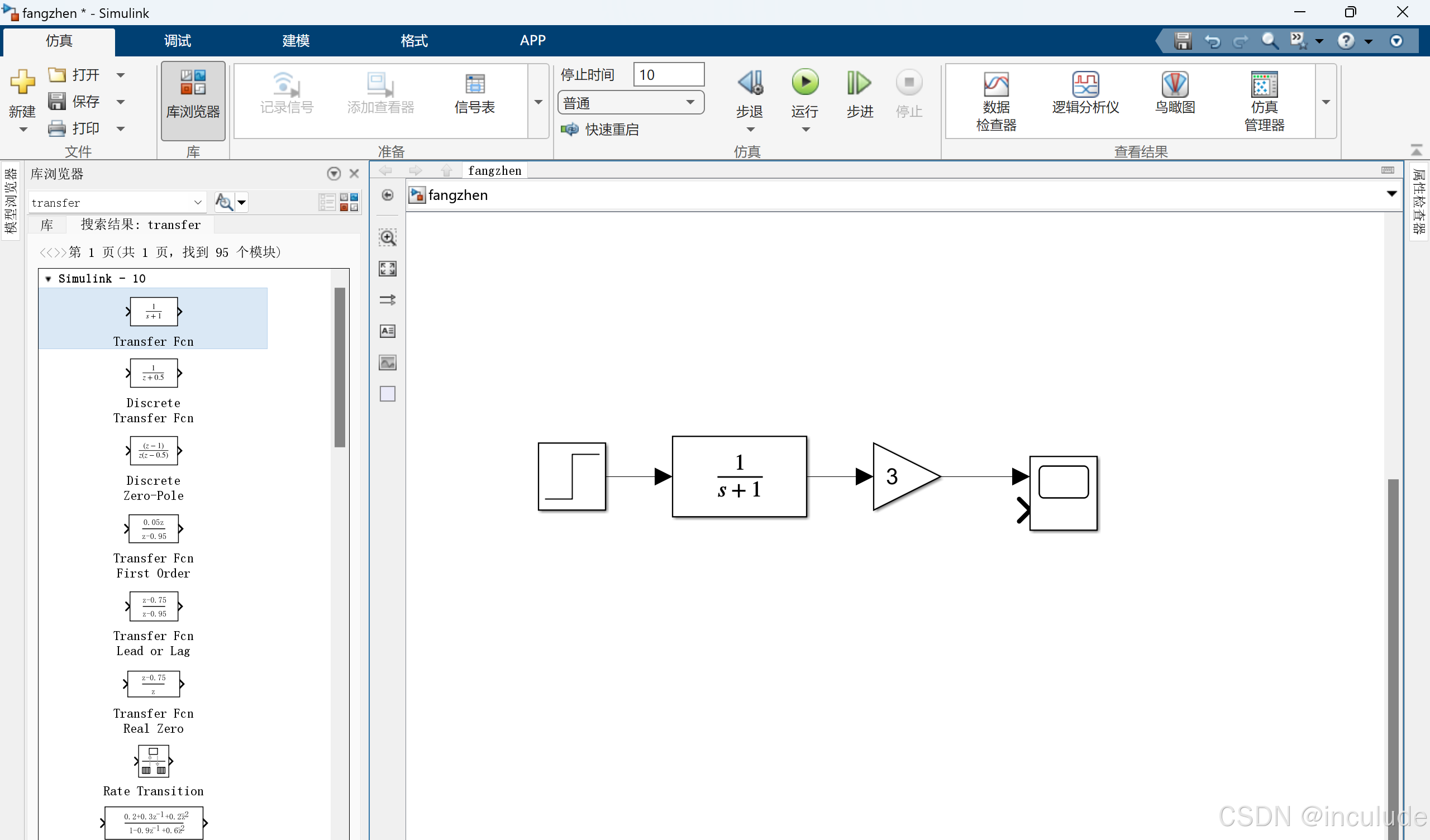
步骤与搭建比例电路大致相同,不同的是需要放置一个Transfer Fcn,
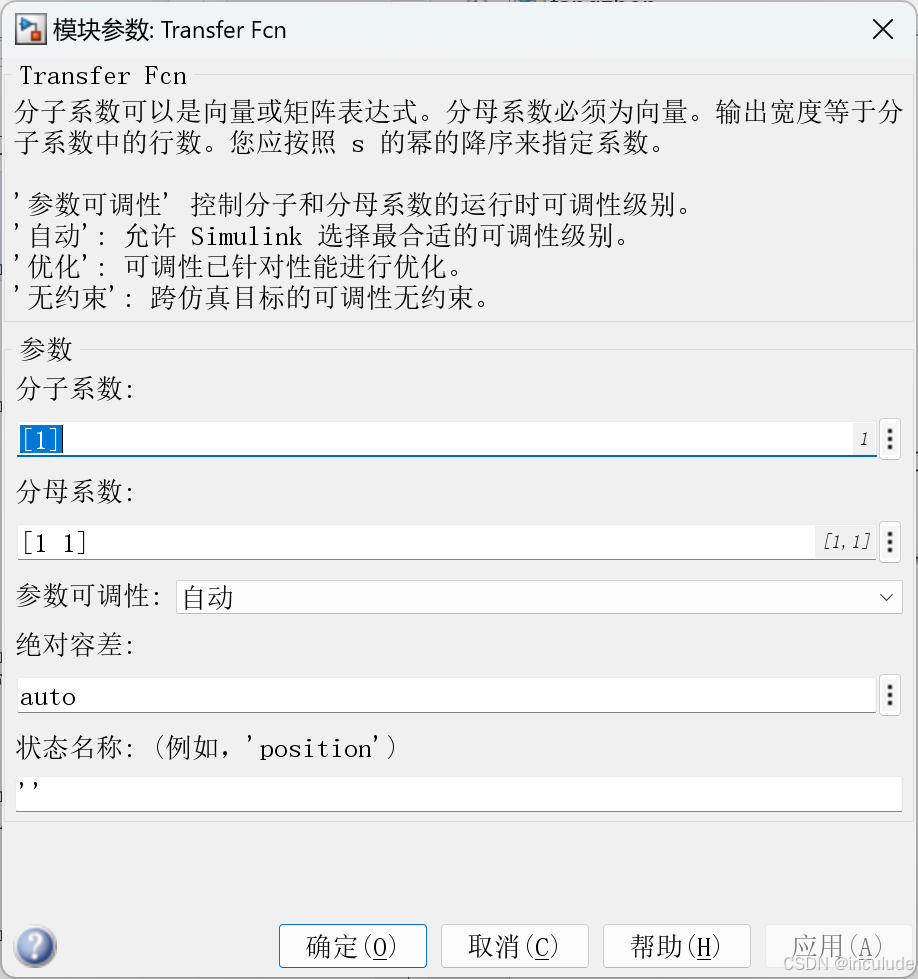
双击这个模块,可以进行调参,系数为降幂排列。
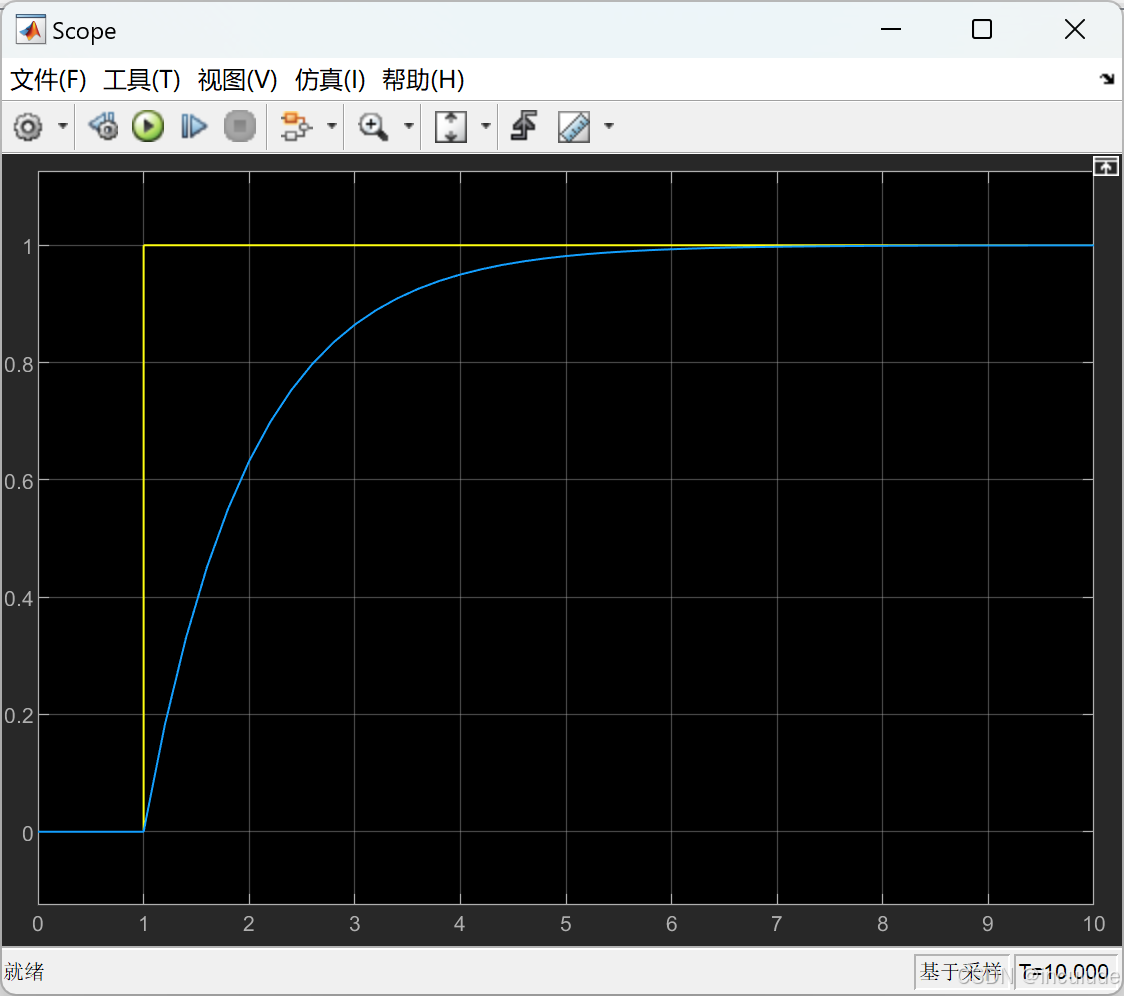
完事点击运行,双击示波器,现象如下图。
积分
积分环节传递函数为
G
(
s
)
=
−
z
2
z
1
=
−
1
R
2
C
1
s
\ G(s)=-\frac{z_2}{z_1}\ =-\frac{1}{R_2C_1s}\,
G(s)=−z1z2 =−R2C1s1
其搭建simulink过程如下
在惯性的基础上进行修改,对Transfer Fcn这个模块进行操作。
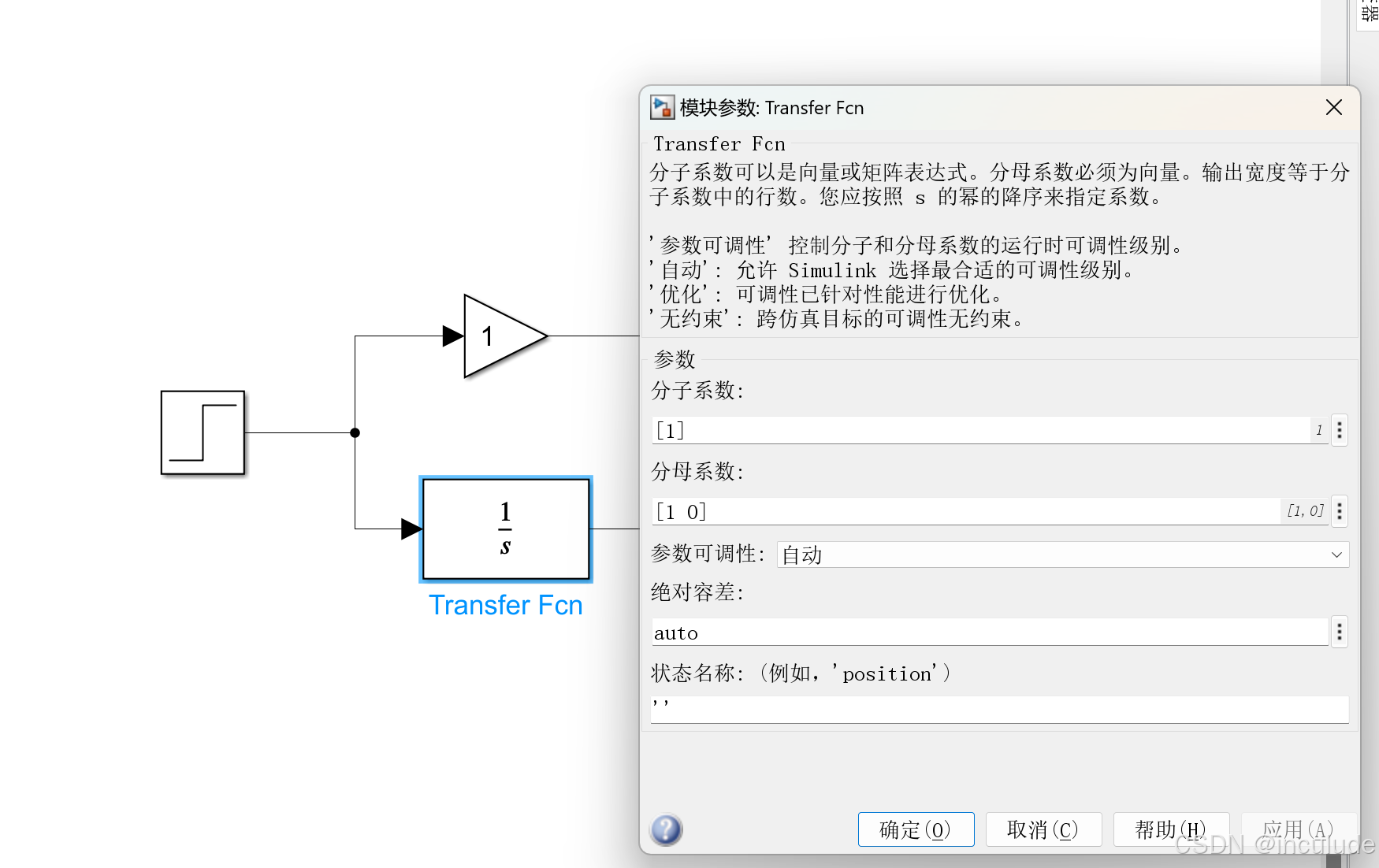
配置参数像我这样。点击运行,双击示波器观察到现象如下图。
比例微分
比例微分环节传递函数为
G
(
s
)
=
−
z
2
z
1
=
−
R
1
C
1
s
\ G(s)=-\frac{z_2}{z_1}\ =-R_1C_1s\,
G(s)=−z1z2 =−R1C1s
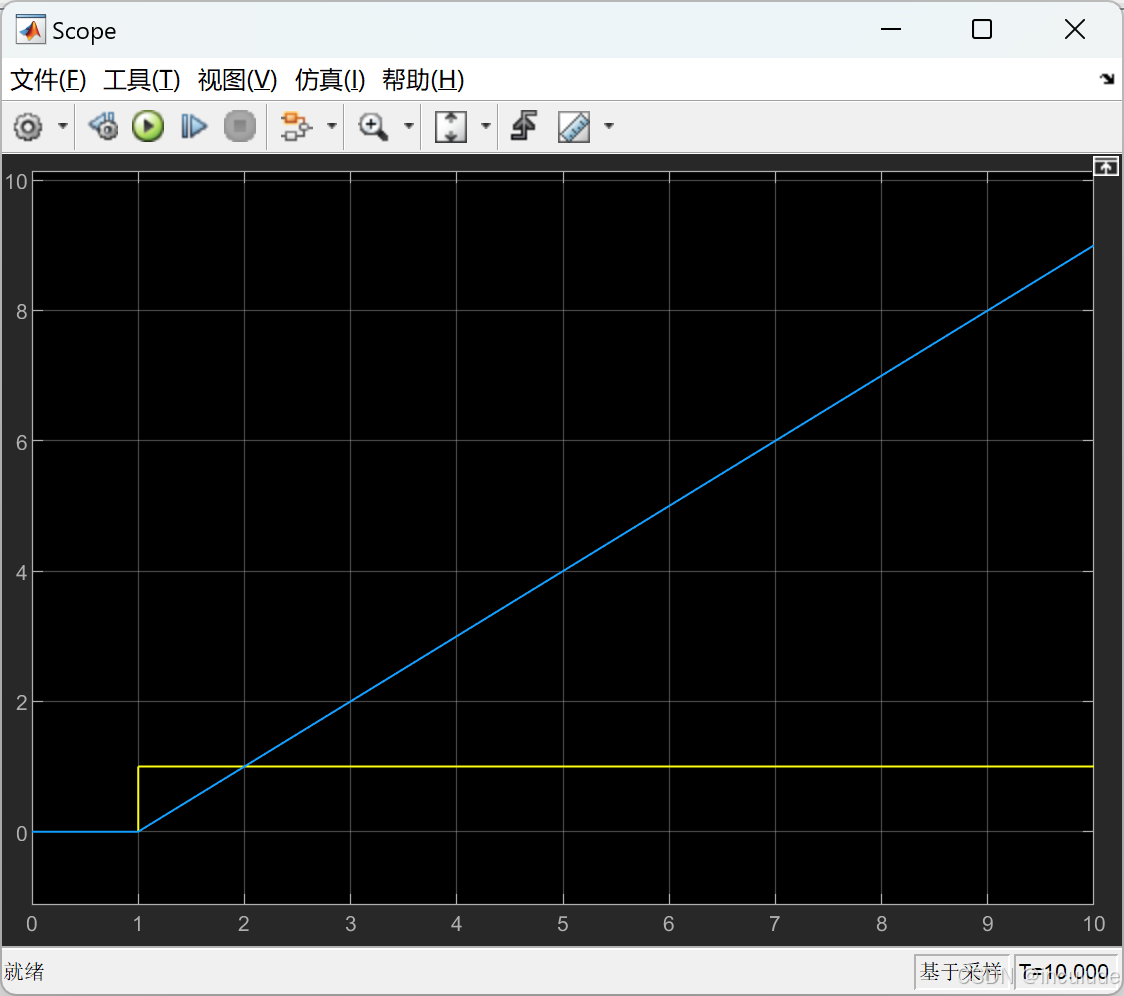
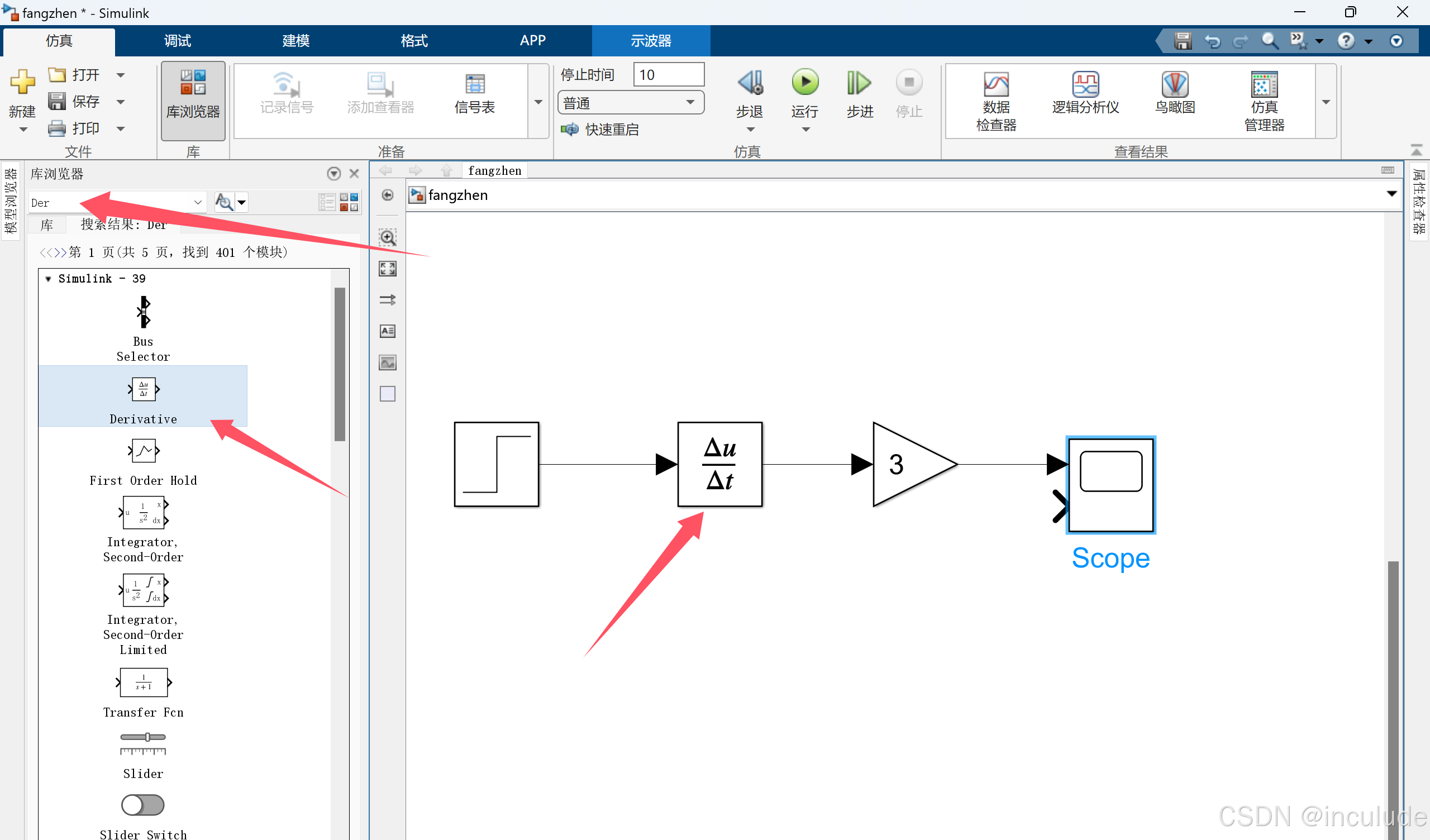
很简单,就是把比例增益和微分模块串联起来。
需要用到一个微分模块,Derivative
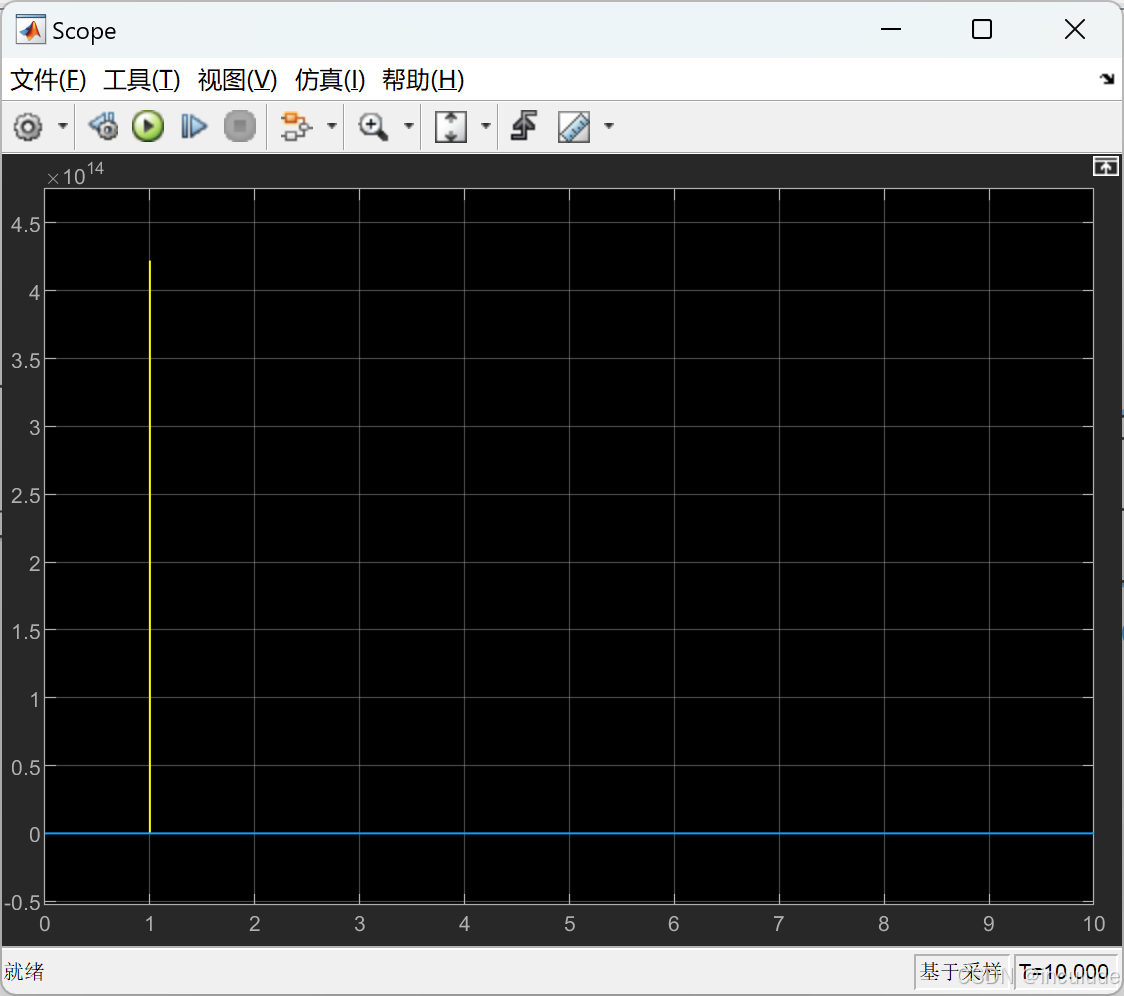
运行现象如下图所示
比例积分
比例积分环节传递函数为
G
(
s
)
=
−
z
2
z
1
=
−
R
2
+
1
/
C
1
R
1
\ G(s)=-\frac{z_2}{z_1}\ =-\frac{R_2+1/C_1}{R_1}\,
G(s)=−z1z2 =−R1R2+1/C1
将比例和积分串联
现象如下图
利用MATLAB图像功能显示Simulink的数据
这个时候有个问题,Simulink示波器显示的波形,只能看个大概,没法进一步分析数据,比如我想看比例积分这个图,他在1.2秒时,Y轴所对应的数据,没法看,但MATLAB里的显示的图像能够使用鼠标点击曲线,具体显示点的X,Y轴数据。所以在这里,记录下Simulink与MATLAB的联系。
这里以比例积分作为例子,目的是将比例积分在Simulink生成的图像在MATLAB中显示,并导出图片。
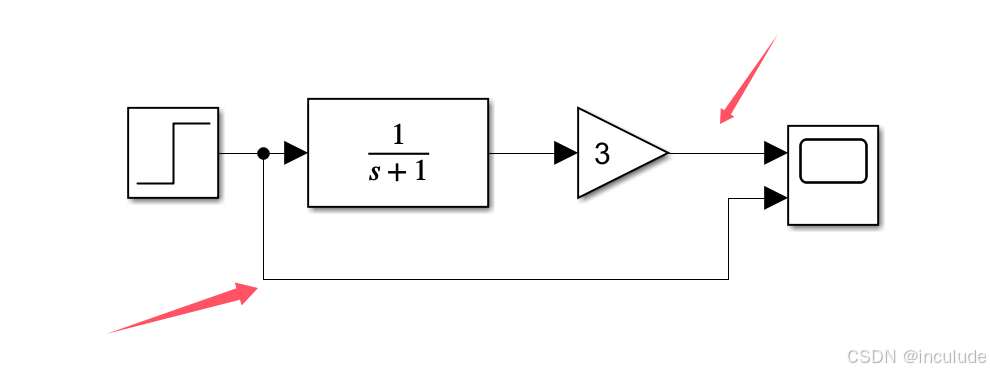
对刚刚比例积分的线路进行适当修改,给示波器添加一个采样通道,方便后续进行对比。
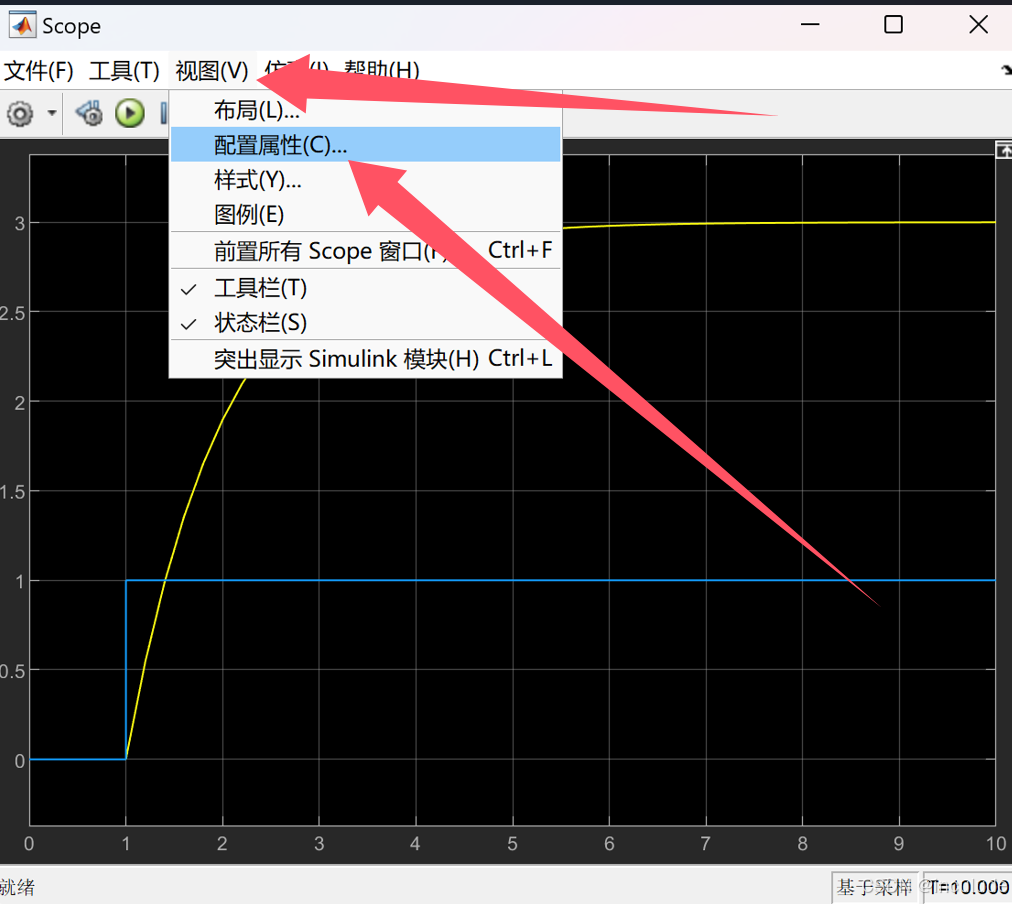
双击示波器,在弹出的界面,点击视图,点击配置属性
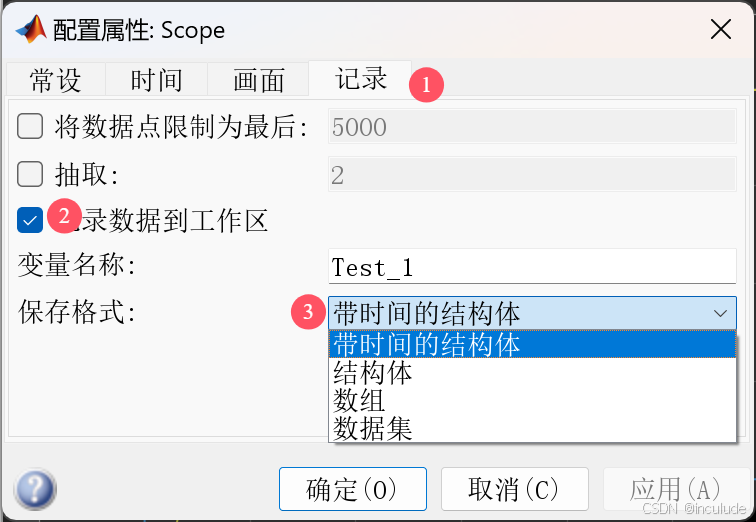
点击记录,勾选记录数据到工作区,保存格式选择带时间的结构体。变量名称我这里写的是Test_1。
完成上述操作,在Simulink界面点击运行即可。
回到MATLAB界面。
在右侧的工作区,找到名称为out,旁边的值写着1X1 SimulationOutput。双击下去。
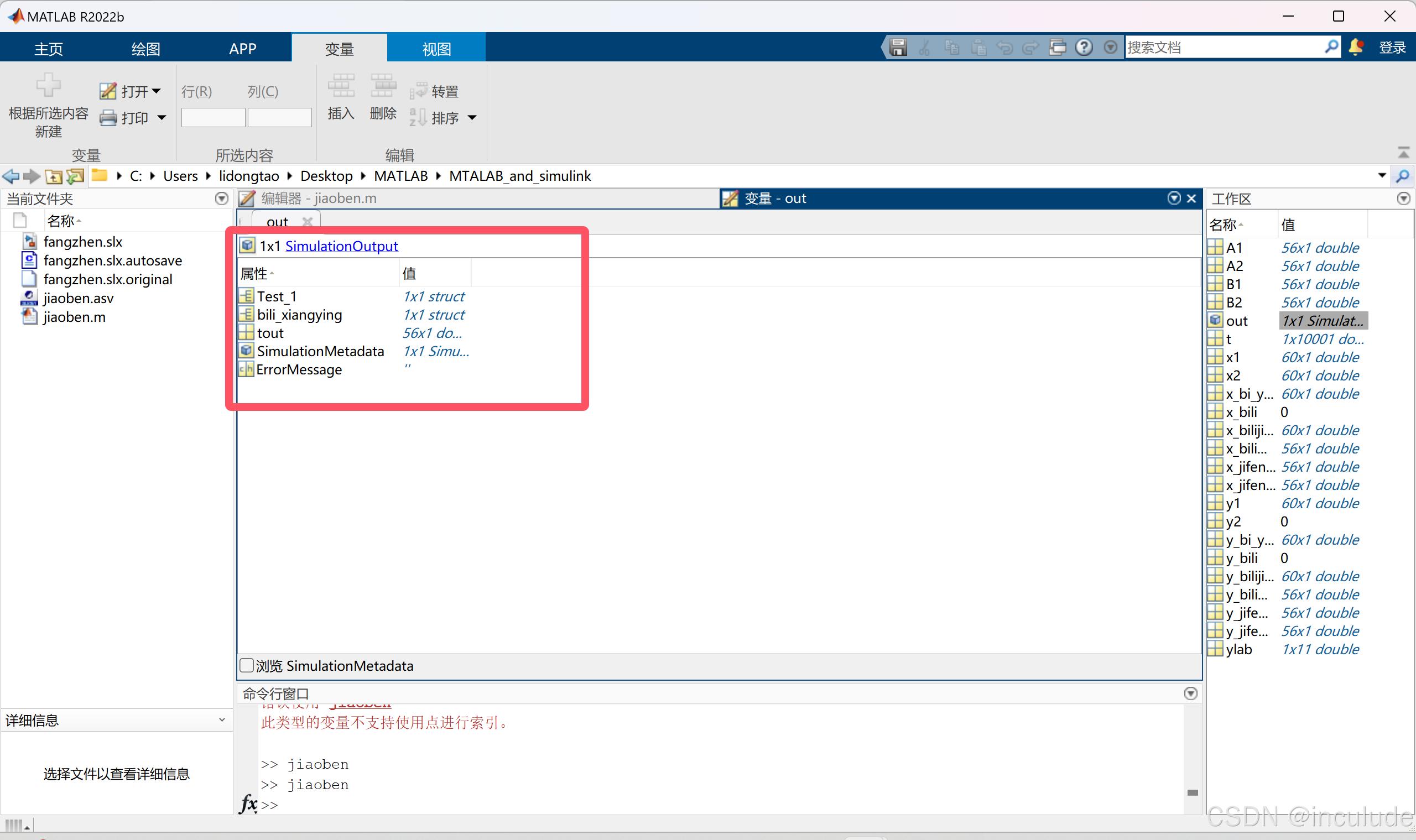
弹出如此界面,找到我们刚刚写的名称为Test_1的变量。
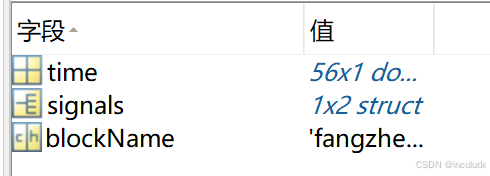
time记录的是时间。
signals记录的是数值。
这里以signals为例子,往下点。
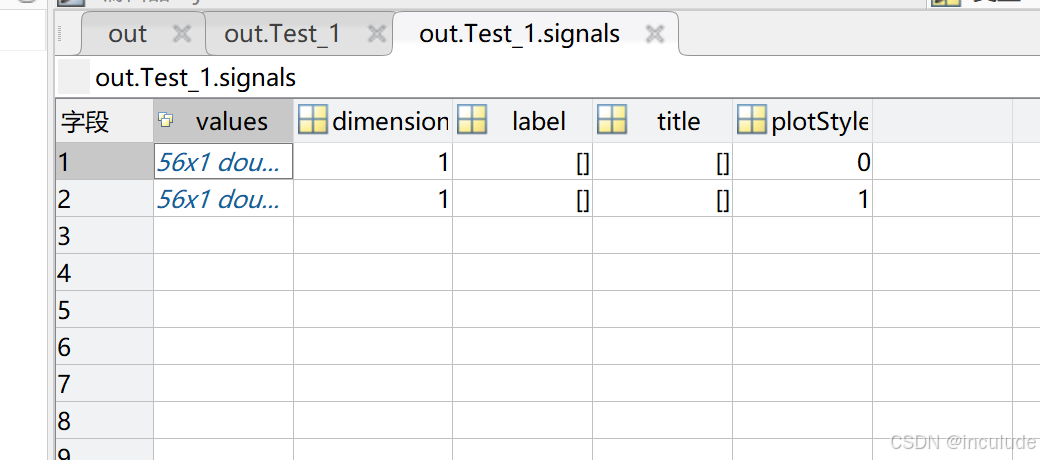
显示出这个表格,1字段记录的是响应,2字段记录的是输入信号。为什么我会知道,你点击去就知道了。这里我双击点进1字段。
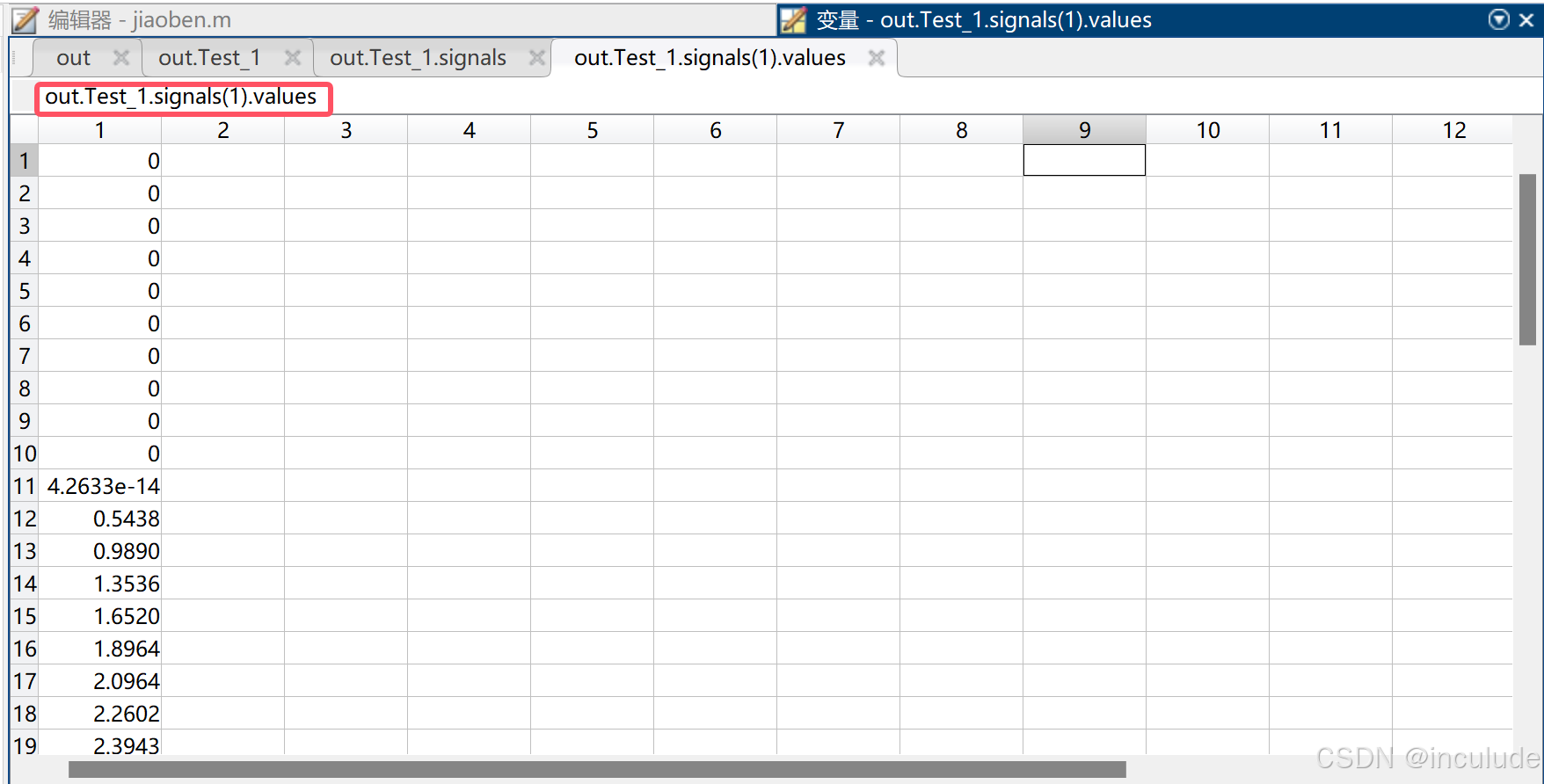
红框所框起来的,便是存储响应数据的结构体。等会需要用到。
接着回到编辑器。
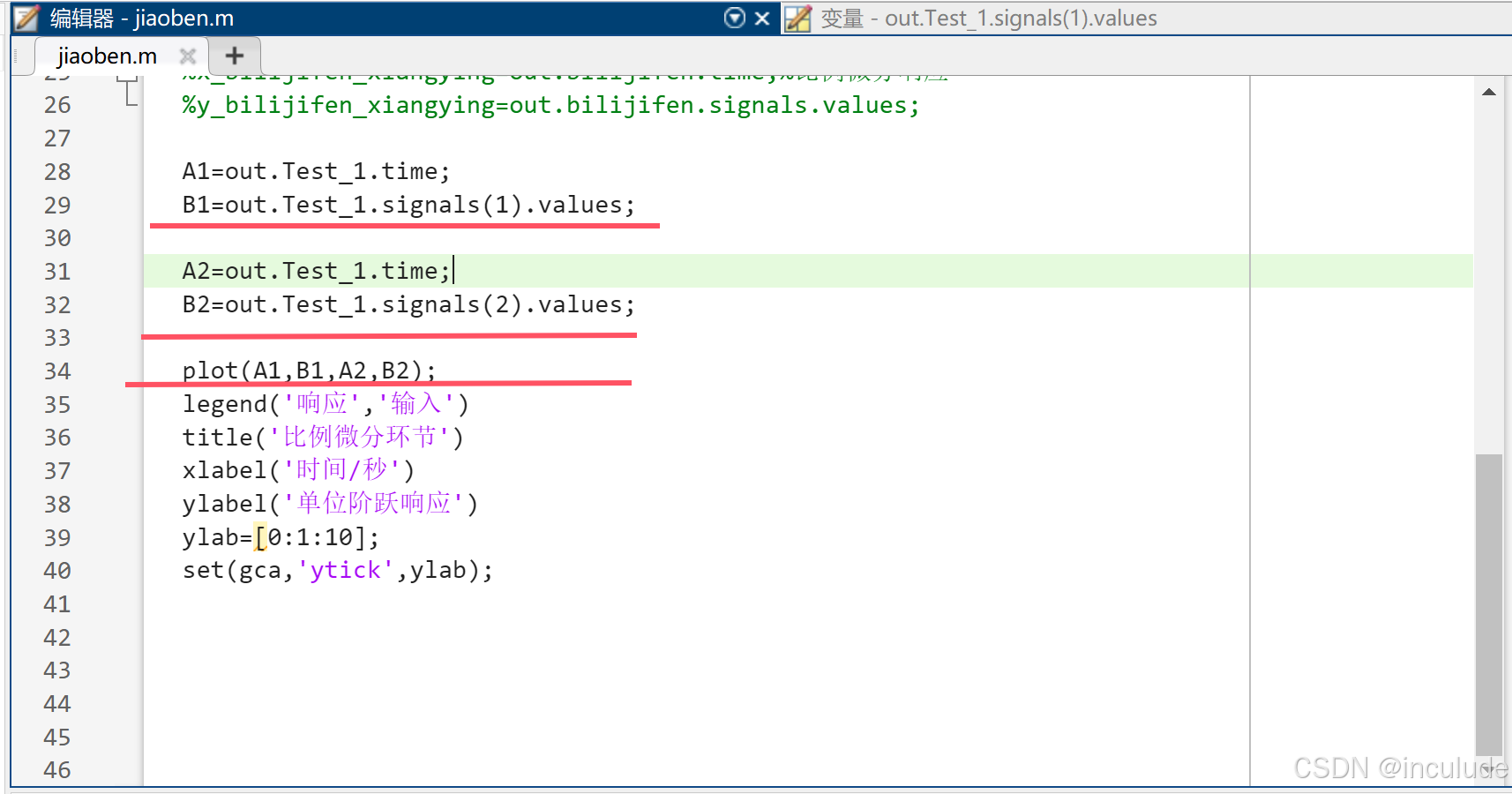
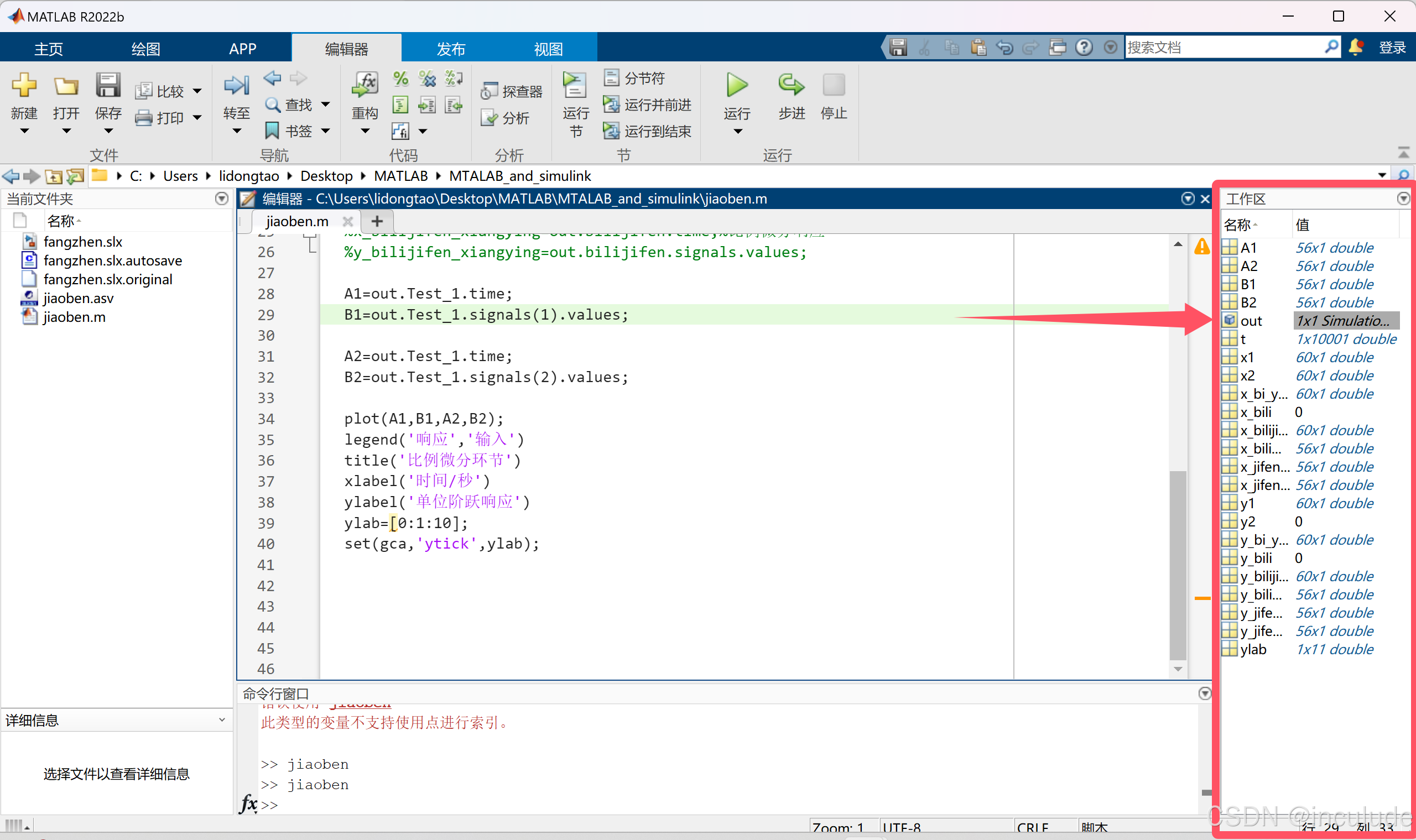
编写这五行程序,
A1=out.Test_1.time; %将时间数据赋值给A1
B1=out.Test_1.signals(1).values;%将响应数据赋给B1
A2=out.Test_1.time; %将时间数据赋给A2
B2=out.Test_1.signals(2).values;%将响应数据赋给B2
%在一个图里作两条曲线
%以A1为横轴,以B1为纵轴。
%以A2为横轴,以B2为纵轴。
plot(A1,B1,A2,B2);
点击运行,结果如下图所示。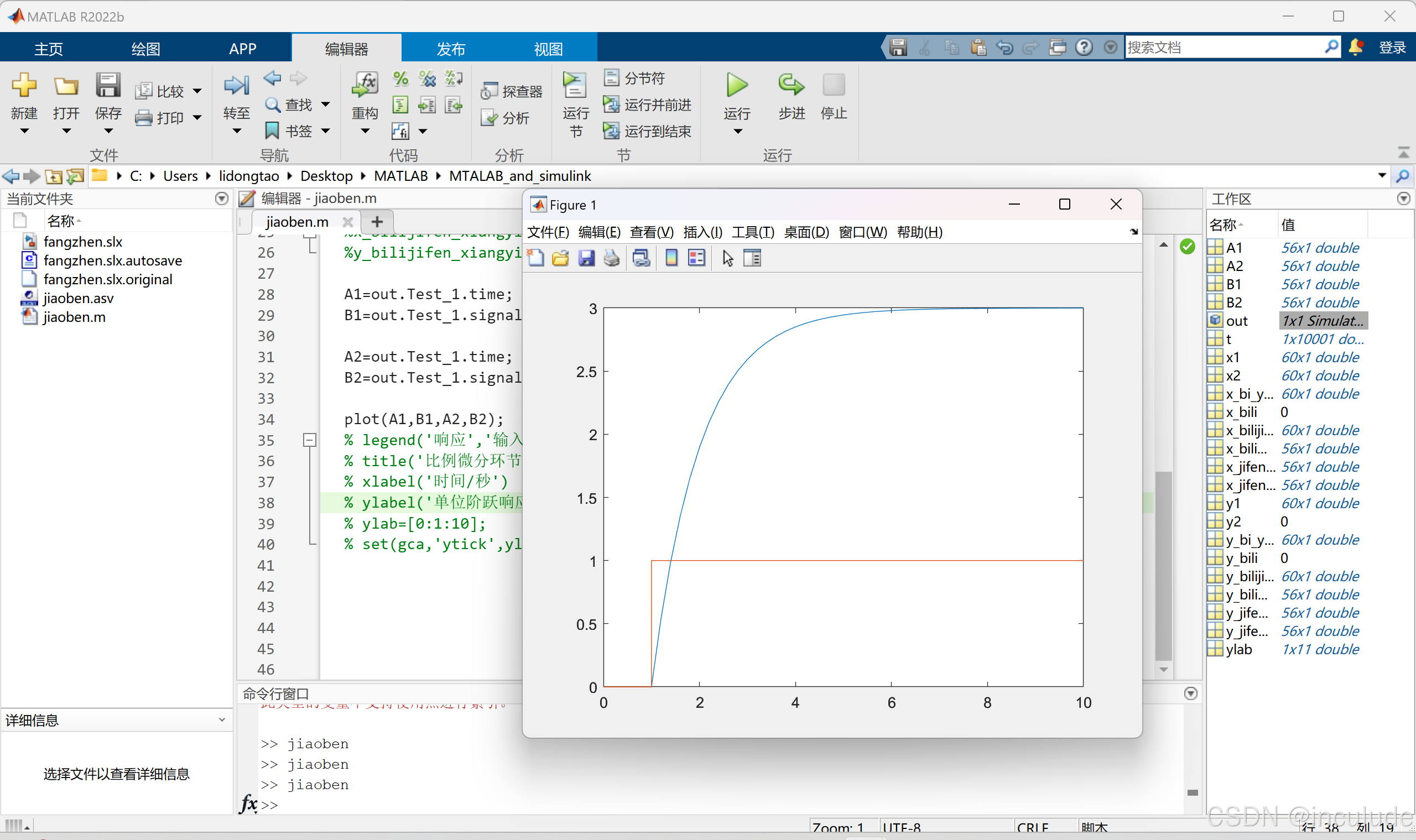

















 2966
2966

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









