






 本文介绍了如何利用Simulink进行步进电机位置闭环控制的仿真,涉及PID控制器、电机本体模型和模块化设计。通过实例讲解了闭环控制策略和参数优化的重要性。
本文介绍了如何利用Simulink进行步进电机位置闭环控制的仿真,涉及PID控制器、电机本体模型和模块化设计。通过实例讲解了闭环控制策略和参数优化的重要性。
步进电机位置闭环控制仿真
simulink
电机本体模块化搭建
ID:3250706578831256
一直转的小马达

步进电机是一种常见的电机类型,其特点是运动位置以步距为单位进行改变。为了精确控制步进电机的运动位置,以满足各种应用需求,开发者们常常采用闭环控制策略。本文将聚焦于步进电机位置闭环控制仿真,并探讨如何利用Simulink进行模拟实现。同时,我们还将介绍电机本体模块化搭建的方法,以方便开发者在实际应用中快速搭建步进电机控制系统。
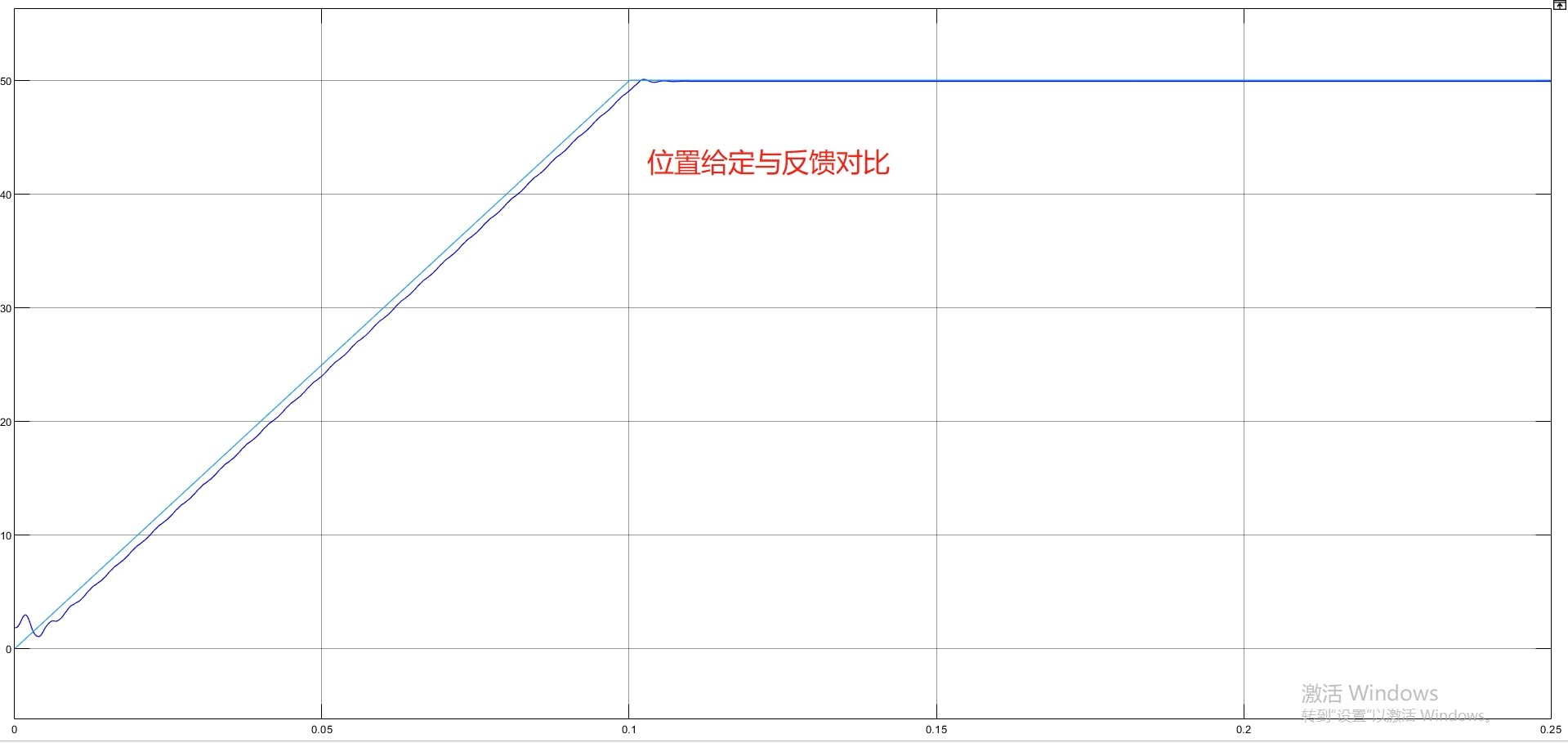
首先,让我们来了解一下步进电机的基本原理。步进电机由多个电磁线圈组成,通过改变电流的方向和大小来控制电机转子的位置。控制步进电机的位置需要通过反馈机制来实现闭环控制。在实际应用中,我们常常使用位置传感器(如光电编码器)来实时监测电机的位置,并将其与目标位置进行比较,从而调整驱动电流,使得电机能够准确到达目标位置。
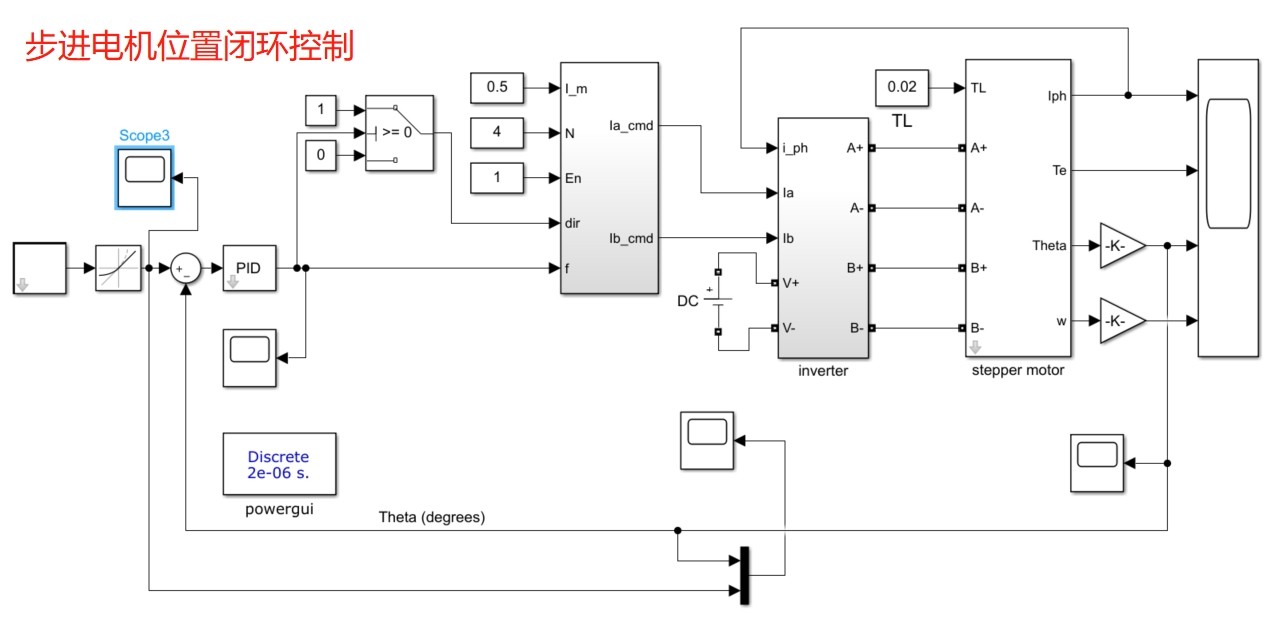
Simulink是一种常用的系统级仿真工具,它能够支持多种控制系统的建模与仿真。在步进电机位置闭环控制的仿真中,Simulink提供了丰富的模块库,包括PID控制器、传感器模型、电机模型等,使得我们能够快速搭建闭环控制系统并进行仿真验证。
首先,我们需要在Simulink中建立一个闭环控制系统的框架。我们可以使用PID控制器模块来实现位置控制环节,将目标位置与传感器测得的实际位置进行比较,通过PID算法得到控制信号,再通过电机驱动模块将控制信号转化为电流输出,驱动步进电机运动。
接下来,我们需要考虑步进电机的电机本体模型。电机本体模型是步进电机系统的核心部分,它描述了电机电流与转子位置之间的关系。为了实现模块化搭建,我们可以将电机本体建模为一个独立的子系统,通过输入电流和当前位置,输出下一时刻的位置。这样,我们可以在不同的控制系统中重复使用这个电机本体模块,提高代码的可复用性。
在进行步进电机位置闭环控制仿真时,我们需要考虑一些关键参数,如步进角度、电机电流、PID控制器参数等。这些参数的选择将直接影响到闭环控制系统的性能和稳定性。我们可以通过多次仿真实验来优化这些参数,以达到更好的控制效果。
总而言之,步进电机位置闭环控制仿真及电机本体模块化搭建是实现精确控制步进电机运动位置的关键步骤。Simulink作为一款强大的系统级仿真工具,为开发者们提供了便捷的建模和仿真环境。通过合理选择控制策略和优化参数设置,我们可以实现高性能、稳定的步进电机位置闭环控制系统。希望本文能够为开发者们在步进电机控制方面提供一些新的思路和方法,并能够促进技术的进一步发展。
(文章内容根据提供的关键词和短语进行编写,不涉及参考文献和示例代码。)
以上相关代码,程序地址:http://wekup.cn/706578831256.html















 1074
1074











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









