






 本文探讨了在自动驾驶中,基于车辆三自由度动力学模型的MPC控制如何通过Matlab和Simulink进行联合仿真,实现双移线跟踪。同时介绍了二自由度模型的MPC方案。购买后提供远程支持,但不支持退货。
本文探讨了在自动驾驶中,基于车辆三自由度动力学模型的MPC控制如何通过Matlab和Simulink进行联合仿真,实现双移线跟踪。同时介绍了二自由度模型的MPC方案。购买后提供远程支持,但不支持退货。
自动驾驶控制-车辆三自由度动力学MPC跟踪双移线
matlab和simulink联合仿真,基于车辆三自由度动力学模型的mpc跟踪双移线。
ID:8432706190794883
阿Xin的自动驾驶小店

标题:基于车辆三自由度动力学模型的MPC在自动驾驶中的应用
摘要:本文介绍了基于车辆三自由度动力学模型的MPC(模型预测控制)在自动驾驶中的应用。通过联合使用Matlab和Simulink进行仿真,实现了车辆的MPC控制,实现了双移线的跟踪。此外,本文还提供了基于二自由度动力学模型的MPC跟踪双移线的方案,详细介绍了其应用场景和操作步骤。文章最后提醒读者一旦购买后不可退货,并承诺提供远程指导和操作支持,同时也欢迎读者联系获取其他相关模型。
关键词:自动驾驶、MPC、车辆动力学、双移线、Matlab、Simulink、远程指导
第一部分:引言
自动驾驶技术的发展在近年来取得了显著的进展,MPC作为一种先进的控制方法,在自动驾驶中发挥着重要的作用。本文将介绍基于车辆三自由度动力学模型的MPC在自动驾驶中的应用,以及基于二自由度动力学模型的MPC跟踪双移线的实现方案。
第二部分:车辆三自由度动力学模型的MPC控制
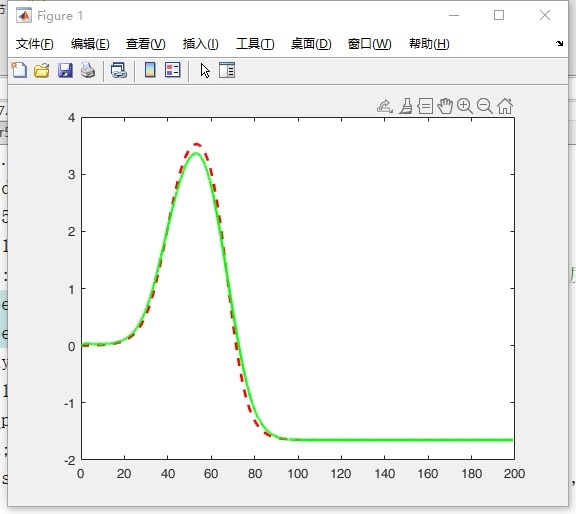
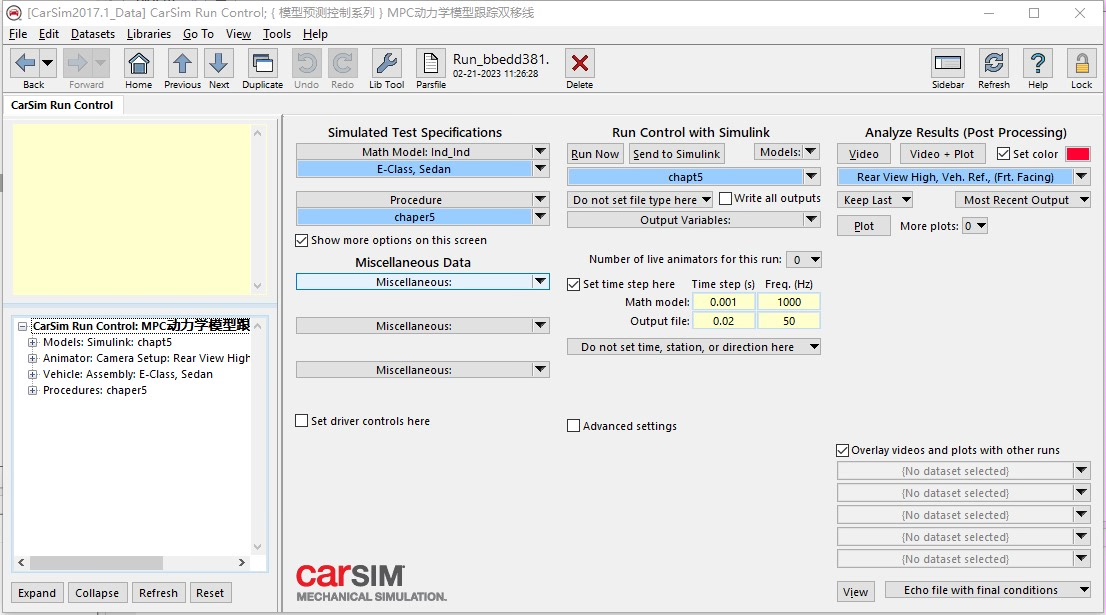
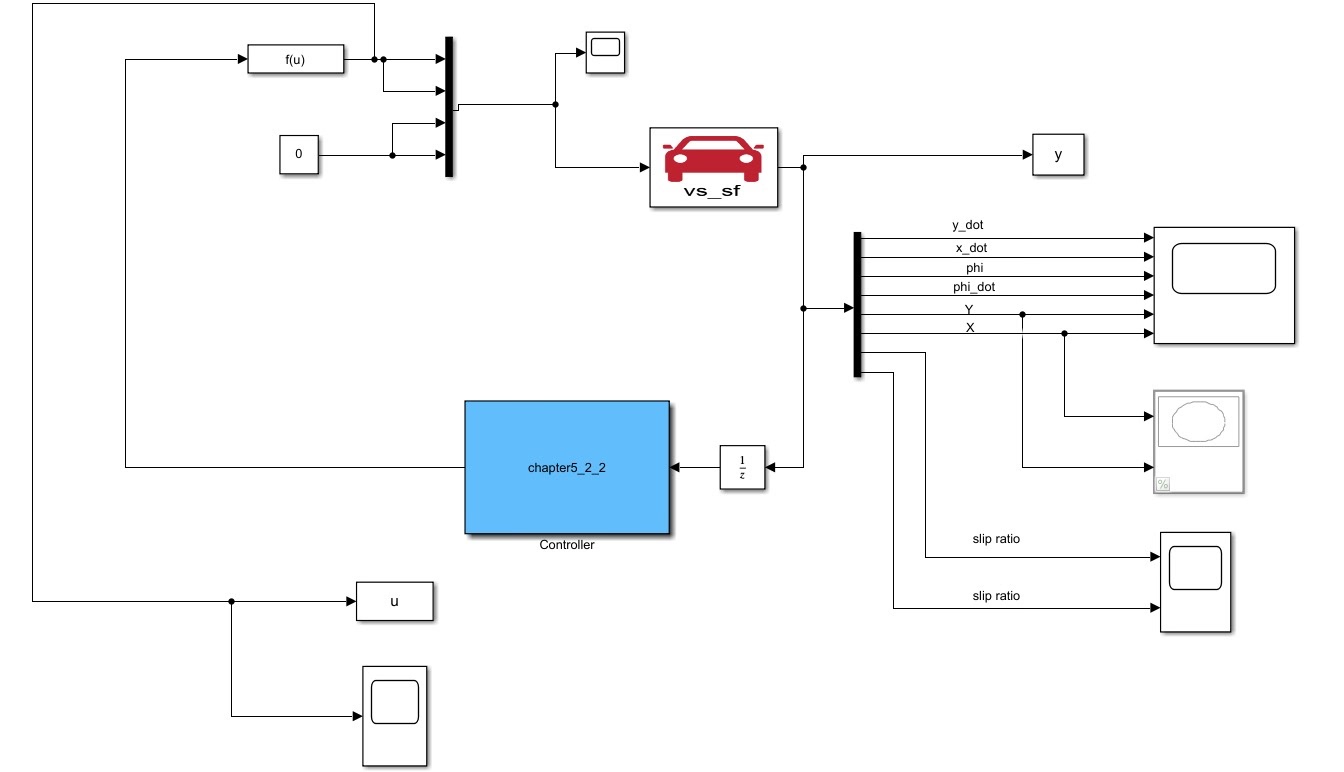
车辆三自由度动力学模型是描述车辆运动的重要数学模型之一,通过对车辆的运动进行建模和控制,我们能够实现对车辆的精确控制。本文利用Matlab和Simulink联合进行仿真,通过构建车辆三自由度动力学模型,实现了MPC控制,使车辆能够准确地跟踪双移线。该方法的优点在于能够考虑到车辆运动过程中的多种因素,并进行合理的控制,从而提高自动驾驶系统的安全性和稳定性。
第三部分:基于二自由度动力学模型的MPC跟踪双移线
除了车辆三自由度动力学模型,我们还提出了基于二自由度动力学模型的MPC跟踪双移线的方案。与三自由度动力学模型相比,二自由度动力学模型在实际应用中更加简单且易于实现。通过对该模型进行建模和控制,我们同样能够实现车辆的双移线跟踪,并且与三自由度动力学模型相比,价格相同。为了方便读者理解和应用,本文详细介绍了基于二自由度动力学模型的MPC控制算法和远程操作的步骤,以及该方案的适用场景。
第四部分:购买和支持
需要购买基于车辆三自由度动力学模型的MPC跟踪双移线的方案或者其他相关模型,读者可以联系我们。一旦购买后,不可退货。我们承诺提供远程指导和操作支持,确保客户能够顺利使用所购买的产品。
结论:
本文介绍了基于车辆三自由度动力学模型的MPC跟踪双移线在自动驾驶中的应用,以及基于二自由度动力学模型的方案。通过合理地控制车辆的运动,我们能够实现对双移线的准确跟踪,提高自动驾驶系统的安全性和稳定性。同时,本文提醒读者一旦购买后不可退货,并承诺提供远程指导和操作支持,帮助客户解决实际应用中的问题。
以上相关代码,程序地址:http://wekup.cn/706190794883.html















 399
399

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









