






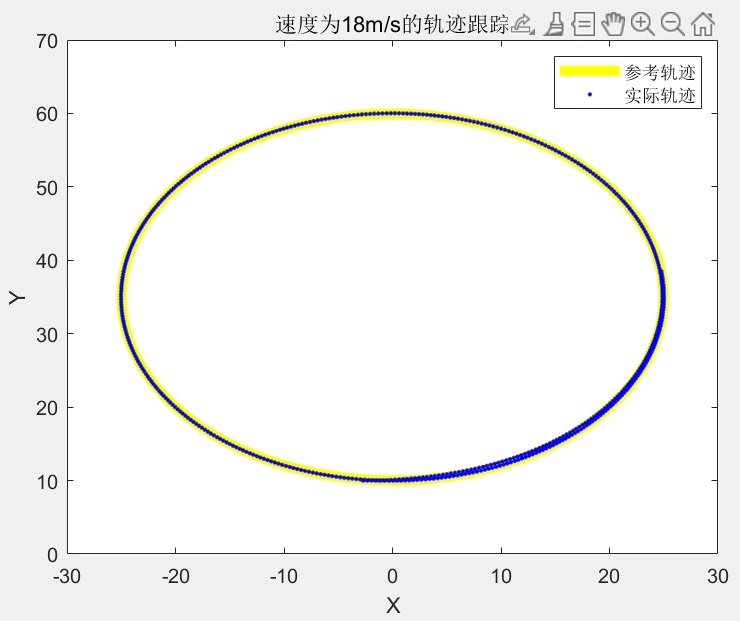
MPC跟踪轨迹圆形(以后轴为基准)
ID:7316706261992406
东方举重的紫薯
在计算机控制系统中,MPC(模型预测控制)是一种先进的控制策略,可以用于实现对动态系统的精确控制。本文将围绕MPC在跟踪轨迹圆形时的应用展开,以后轴为基准。
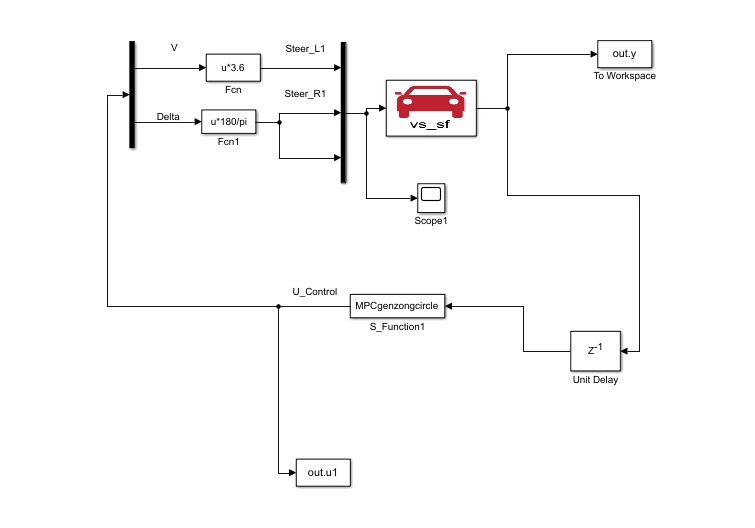
MPC作为一种模型驱动型控制策略,通过对系统模型进行预测,获取未来一段时间内的系统响应,并根据预测结果进行控制决策。在跟踪轨迹圆形的应用中,MPC将系统模型与圆形轨迹进行匹配,实现对系统状态的优化调节。
首先,我们需要建立一个合适的数学模型来描述被控对象。在跟踪轨迹圆形时,我们可以以后轴为基准,将系统建模为一维的运动模型。根据运动学方程,我们可以得到车辆后轴的位置、速度和加速度之间的关系。
在建立模型后,我们需要确定适当的性能指标来评估系统的性能。在跟踪轨迹圆形的应用中,我们可以选择最小化车辆与轨迹之间的偏差作为性能指标。通过调整控制策略,使得偏差尽可能接近于零,从而实现车辆对轨迹的准确跟踪。
接下来,我们需要确定优化问题的目标函数和约束条件。在MPC中,常用的目标函数是最小化预测误差的二次范数,同时考虑控制输入的限制条件。对于跟踪轨迹圆形的应用,我们可以设置目标函数为车辆与轨迹之间的偏差的平方和,并考虑车辆的加速度限制。
为了实现MPC控制策略,我们需要进行系统辨识,即通过实验数据来确定系统的模型参数。通过对车辆进行一系列的测试,我们可以获得车辆的动力学参数,并
以上相关代码,程序地址:http://wekup.cn/706261992406.html















 4898
4898











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









