利用python学习OpenCV,个人感觉比较方便。函数的形式与C++基本相同,所以切换过来还是比较好的,对于像我这种对python不太熟练的人,使用python的集成开发环境PyCharm进行学习,可以设置断点调试,有助于我这类初学者理解掌握。
摄像机标定是机器人视觉进行目标定位跟踪的首要环节,通过标定板标定好摄像机的内外参数,然后进行后续的定位识别工作。本次介绍的摄像机标定的实验测试图像是OpenCV安装目录文件夹cpp\samples中的left0-left14.jpg图像。
下面是利用python语言结合OpenCV进行摄像机标定的代码:
-
- __author__ = 'Microcosm'
-
- import cv2
- import numpy as np
- import glob
-
-
- criteria = (cv2.TERM_CRITERIA_MAX_ITER | cv2.TERM_CRITERIA_EPS, 30, 0.001)
-
-
- objp = np.zeros((6*7,3), np.float32)
- objp[:,:2] = np.mgrid[0:7,0:6].T.reshape(-1,2)
-
- obj_points = []
- img_points = []
-
- images = glob.glob("E:\python\Python Project\opencv_showimage\images\calibrateImages\*.jpg")
- for fname in images:
- img = cv2.imread(fname)
- gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
- size = gray.shape[::-1]
- ret, corners = cv2.findChessboardCorners(gray, (7,6), None)
-
- if ret:
- obj_points.append(objp)
-
- corners2 = cv2.cornerSubPix(gray, corners, (5,5), (-1,-1), criteria)
- if corners2:
- img_points.append(corners2)
- else:
- img_points.append(corners)
-
- cv2.drawChessboardCorners(img, (7,6), corners, ret)
- cv2.imshow('img', img)
- cv2.waitKey(50)
-
- print len(img_points)
- cv2.destroyAllWindows()
-
-
- ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(obj_points, img_points,size, None, None)
-
- print "ret:",ret
- print "mtx:\n",mtx
- print "dist:\n",dist
- print "rvecs:\n",rvecs
- print "tvecs:\n",tvecs
-
- print("-----------------------------------------------------")
-
- img = cv2.imread(images[12])
- h, w = img.shape[:2]
- newcameramtx, roi = cv2.getOptimalNewCameraMatrix(mtx,dist,(w,h),1,(w,h))
- print newcameramtx
- print("------------------使用undistort函数-------------------")
- dst = cv2.undistort(img,mtx,dist,None,newcameramtx)
- x,y,w,h = roi
- dst1 = dst[y:y+h,x:x+w]
- cv2.imwrite('calibresult11.jpg', dst1)
- print "方法一:dst的大小为:", dst1.shape
-
-
- print("-------------------使用重映射的方式-----------------------")
- mapx,mapy = cv2.initUndistortRectifyMap(mtx,dist,None,newcameramtx,(w,h),5)
-
- dst = cv2.remap(img,mapx,mapy,cv2.INTER_CUBIC)
- x,y,w,h = roi
- dst2 = dst[y:y+h,x:x+w]
- cv2.imwrite('calibresult11_2.jpg', dst2)
- print "方法二:dst的大小为:", dst2.shape
-
- print("-------------------计算反向投影误差-----------------------")
- tot_error = 0
- for i in xrange(len(obj_points)):
- img_points2, _ = cv2.projectPoints(obj_points[i],rvecs[i],tvecs[i],mtx,dist)
- error = cv2.norm(img_points[i],img_points2, cv2.NORM_L2)/len(img_points2)
- tot_error += error
-
- mean_error = tot_error/len(obj_points)
- print "total error: ", tot_error
- print "mean error: ", mean_error
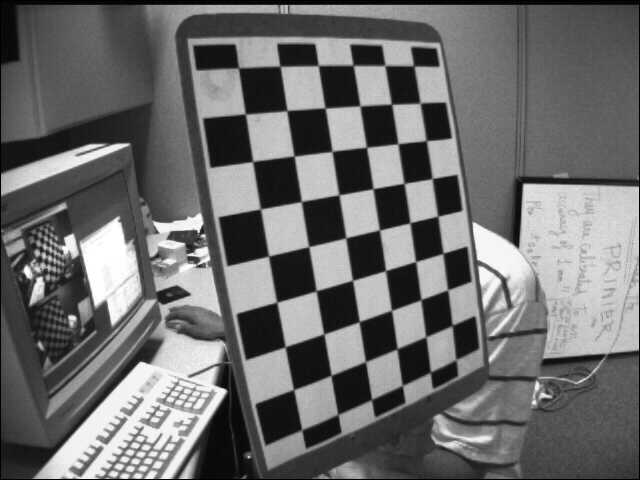
下图是畸变校正前的图片:
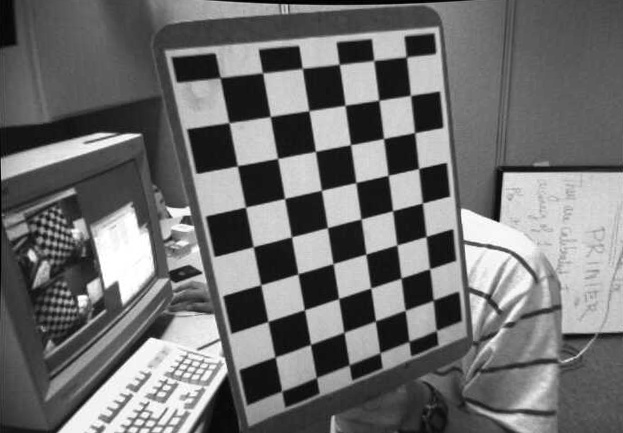
通过标定获取摄像机内外参数以及畸变校正系数后对其进行校正:
方法一:

方法二:









 超级会员免费看
超级会员免费看

 本文介绍了如何使用Python和OpenCV进行摄像机标定,包括设置亚像素角点参数、寻找标定板角点、计算内外参数、畸变校正等步骤,并展示了两种不同的畸变校正方法。
本文介绍了如何使用Python和OpenCV进行摄像机标定,包括设置亚像素角点参数、寻找标定板角点、计算内外参数、畸变校正等步骤,并展示了两种不同的畸变校正方法。















 22万+
22万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









