







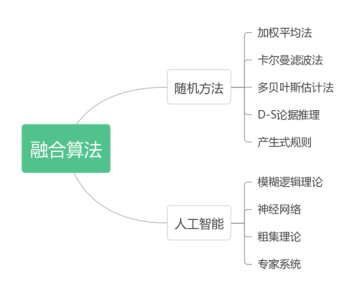
1. 随机方法
1.2《感知融合算法之——D-S论据融合法》:
https://blog.csdn.net/jane0819/article/details/131228727
目录:
- 概述
- D-S论据理论
- D-S融合实例
- D-S论据存在的问题
- D-S论据的改进
- 基于D-S论据的目标融合
1.3《感知融合算法之——加权平均法及优化方法》:
https://blog.csdn.net/jane0819/article/details/131411007
目录
- 一次加权平均
- 二次加权的方法
2.1. 单个传感器加权
2.2. 多个传感器加权- 动态自适应的多雷达信息加权融合方法
3.1. 质量因子的组成
3.2. 融合与评估
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 680
680











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











