







 本文介绍了路径规划中的离散化技术,包括路线图方法如可视性图和Voronoi图,以及单元分解法,如精确和近似单元格分解。这些方法用于将连续的配置空间转化为可搜索的图结构,以便找到从起点到目标的路径。此外,还讨论了势场法,它通过结合吸引和排斥势场引导机器人避开障碍物。然而,势场法存在不完整性和非最优性的问题。
本文介绍了路径规划中的离散化技术,包括路线图方法如可视性图和Voronoi图,以及单元分解法,如精确和近似单元格分解。这些方法用于将连续的配置空间转化为可搜索的图结构,以便找到从起点到目标的路径。此外,还讨论了势场法,它通过结合吸引和排斥势场引导机器人避开障碍物。然而,势场法存在不完整性和非最优性的问题。
8.Roadmap路线图
即将学习的第一组离散化方法被称为路线图,该方法使用一个简单的连通图来表示配置空间——类似于用地铁地图来表示城市。

路线图方法通常分两个阶段实现:
—构建阶段从空间的连续表示中构建图形。这个阶段通常会花费大量的时间和精力,但是生成的图可以用于多个查询,只需要进行最小的修改。
—查询阶段评估图像以找到从开始位置到目标位置的路径。这是通过搜索算法来完成的。
在这个离散化部分,我们只讨论和评估每个路线图方法的构建阶段。而查询阶段将在离散化部分之后的图搜索部分中更详细地讨论。
接下来将学习的两个路线图方法是可视性(Visibility)图和Voronoi图方法。
9.可视性(Visibility)图
可视性图通过将开始节点、所有障碍物的顶点和目标节点相互连接(除了那些会导致与障碍物碰撞的节点)来构建路线图。可视性图之所以叫这个名字是有原因的——它将每个节点连接到从其位置“可见”的所有其他节点。
—节点:起点、目标和所有障碍顶点。
—边:两个节点之间不与障碍物相交的边,包括障碍物边。
下图显示了包含多边形障碍物的配置空间的可见性图。
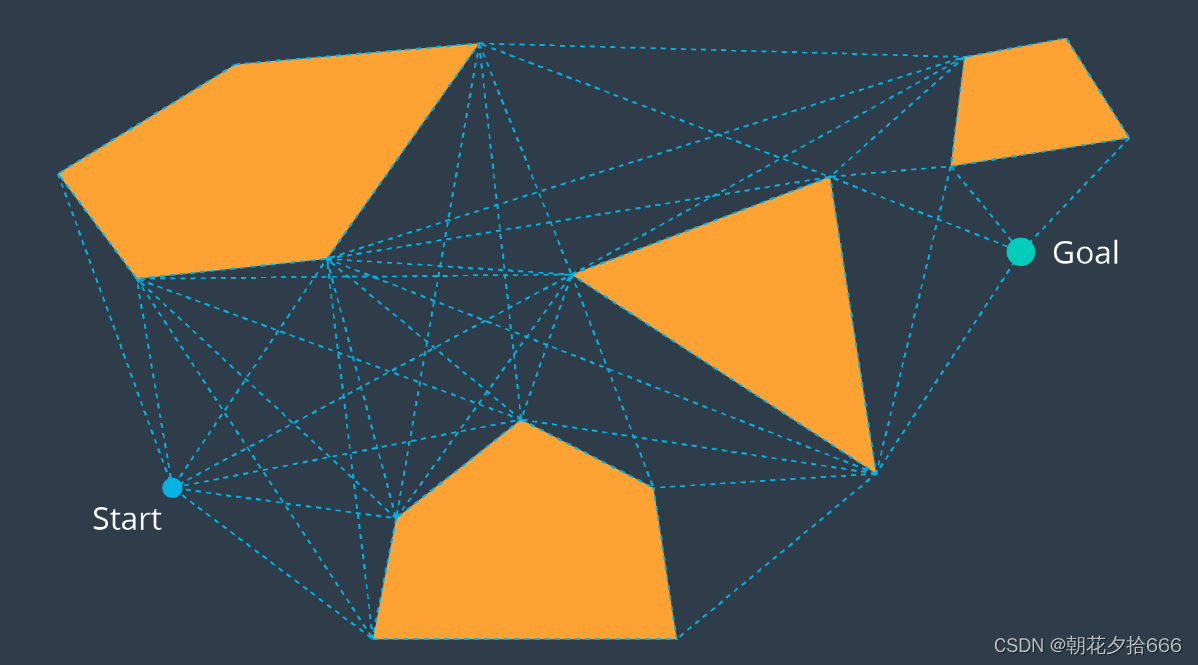
构建可视性图的动机是,从开始节点到目标节点的最短路径将是一条分段线性路径,只在障碍物的顶点处弯曲。这在直觉上是有道理的——路径应该尽可能地贴近障碍物的边角,而不增加任何额外的长度。
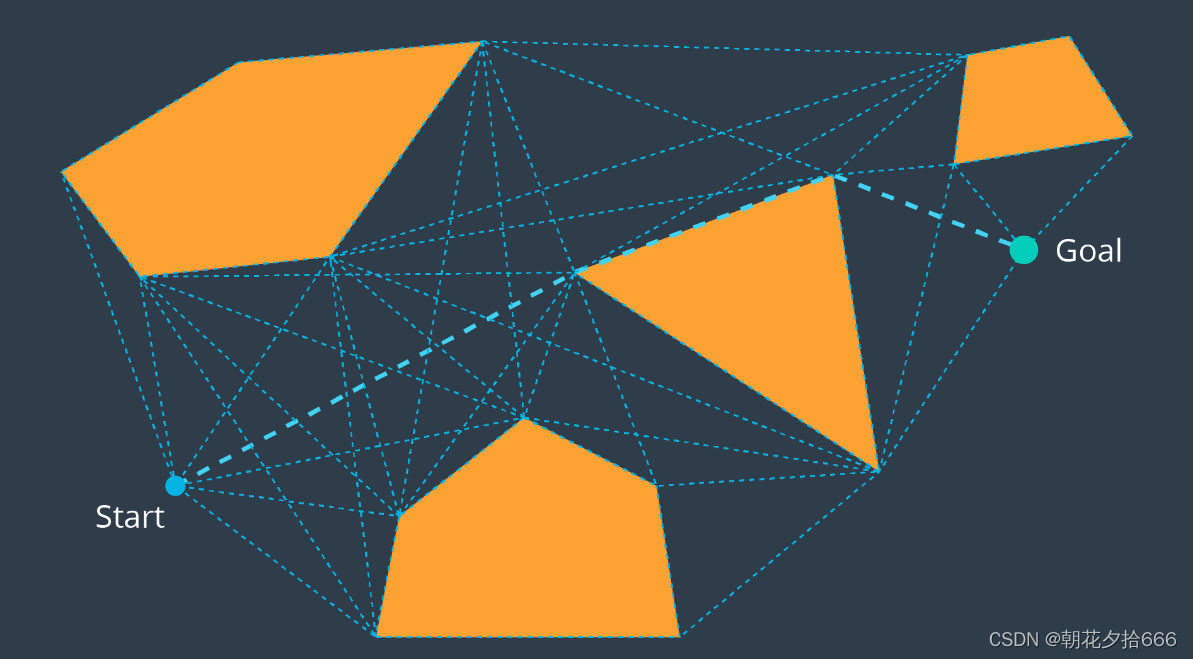
一旦构建了可视性图,就可以应用搜索算法找到从起点到目标的最短路径。下图显示了可见性图中的最短路径。
小测试:
虽然用于搜索路线图的算法还没有引入,但是否有任何算法能够找到从开始到目标的路径,以及最优路径是否在路线图内,仍然值得分析。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 929
929

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









