







1.内容简介
- 识别不同类型的路径规划算法
- 理解一组算法的内部工作原理
- 评估算法对特定应用的适用性
- 实现搜索算法
2.路径规划示例
术语
完整性——如果一个算法能够在起点和目标之间找到一条路径,那么这个算法就是完整的。
最优性——如果一个算法能够找到最佳的解决方案,那么它就是最优的。
bug算法
下面的问题演示一个有解决方案,但bug算法无法找到它的例子:
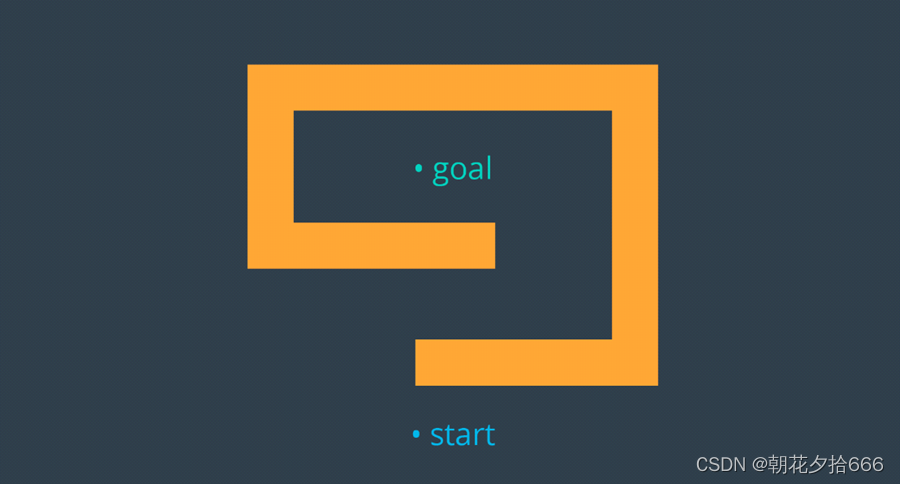
机器人会无休止地穿越在障碍物的外墙周边,但bug算法的一些变体可以弥补这个错误,大部分路径规划算法依赖于本文将介绍的其他原则。在研究新的算法时,我们将在分析算法对任务的适用性时重新考虑完整性和最优性的概念。
3.路径规划方法
路径规划方法
在本文中,将学习三种不同的路径规划方法。第一种称为离散(或组合)路径规划,是三种方法中最直接的。另外两种方法,称为基于样本的路径规划和概率路径规划,建立在离散规划的基础上,以开发更广泛适用的路径规划解决方案。
离散规划
离散规划是将机器人的工作空间显式离散化为一个连通图,并应用graph-search(图搜索)算法来计算最佳路径。这个过程非常精确(实际上,可以通过改变离散空间的精细程度来显式地调整精度),而且非常彻底,因为它离散了整个工作空间。因此,离散规划的计算成本可能非常高——对于大型路径规划问题来说,这可能令人望而却步。
下图显示了应用于二维工作空间的离散路径规划的一种可能实现。
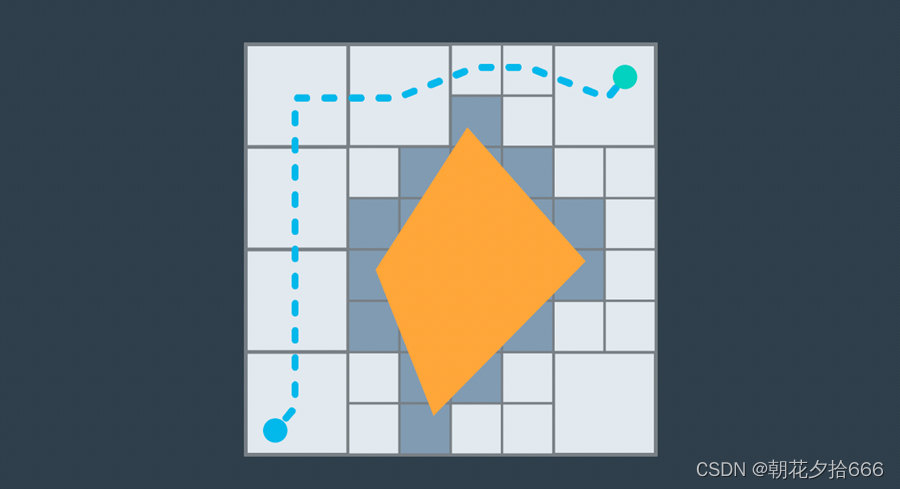
离散路径规划在其精确性上是优雅的,但最适合于低维问题。对于高维问题,基于样本的路径规划是一种更合适的方法。
基于样本的规划
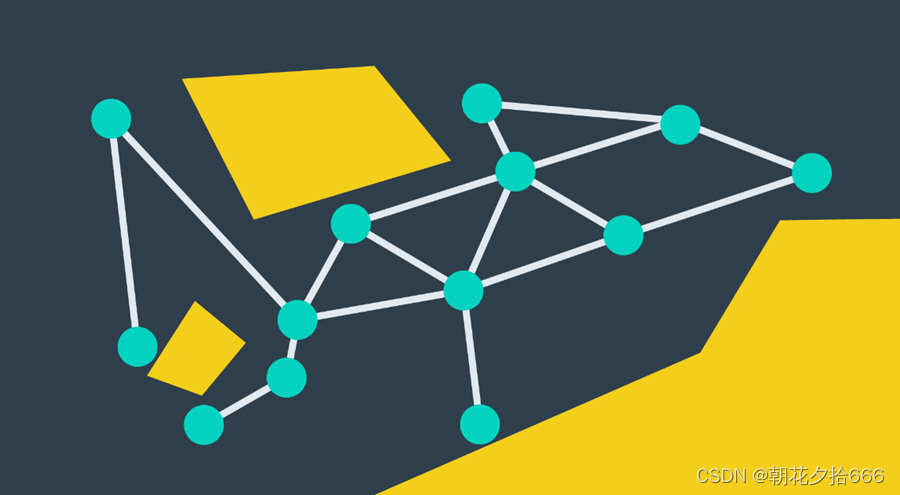
基于样本的路径规划探测工作空间以增量地构造一个图。与离散工作空间的每个部分不同,基于样本的规划采用许多样本并使用它们来构建工作空间的离散表示。生成的图不如使用离散规划创建的图精确,但由于使用的样本数量相对较少,因此构造起来要快得多。
使用基于样本的规划生成的路径可能不是最佳路径,但在某些应用中——快速生成可行路径比等待数小时甚至数天生成最优路径要好。
下图显示了使用基于样本的规划创建的二维工作空间的图形表示。
概率路径规划
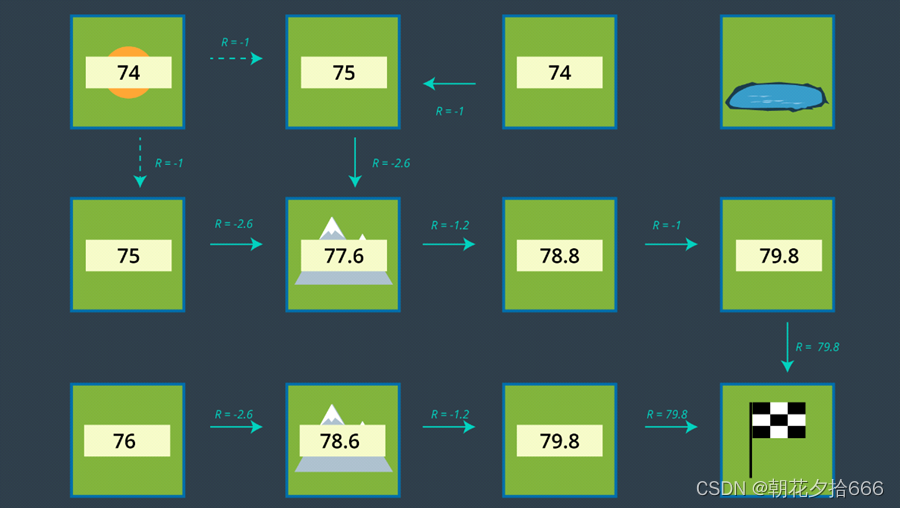
在本模块中学习的最后一种路径规划是概率路径规划。前两种方法一般地考虑路径规划问题——不了解谁或什么可能在执行动作——概率路径规划考虑了机器人运动的不确定性。
虽然这在某些环境中可能不会提供显著的好处,但在高度受限的环境或具有敏感或高风险区域的环境中尤其有用。
下图显示了应用于包含危险的环境(右上方的湖泊)的概率路径规划:
Multi-Lesson地图
在本文中,学习几种离散路径规划算法及基于样本和概率规划,然后应用到路径规划实验中,并使用C++编写搜索算法。
4.连续性表示
为了考虑机器人的几何形状并简化路径规划的任务,工作空间中的障碍物可以膨胀以创建一个称为配置空间(或C空间)的新空间。障碍物的边缘随着机器人的半径大小膨胀,机器人本体可以被视为一个点,使算法更容易搜索路径。C空间是所有机器人姿态的集合,可以分解为C_Free和C_Obs。
5.Minkowski求和
Minkowski求和
Minkowski之和是一种数学性质,可用于计算给定障碍物和机器人几何的配置空间。
Minkowski之和计算方法的直觉可以通过想象用一个形状像机器人的画笔绘制一个障碍物的外部来理解,机器人的原点是画笔的尖端。涂漆面积为C_obs。下图显示了这一点。
 为了创建配置空间,对工作空间中的每一个障碍物都
为了创建配置空间,对工作空间中的每一个障碍物都
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1727
1727

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









