






ch7
FeatureExtraction 在书中源码的基础上简单修改 自己敲了一遍 顺便复习vector迭代器
需要安装opencv3 涉及到opencv共存问题
执行前可以先查看opencv版本
pkg-config --modversion opencv参考这篇文章:
Ubuntu下多版本OpenCV共存和切换_W_Tortoise的博客-CSDN博客_ubuntu opencv多版本
源码:
#include <iostream>
#include <opencv2/opencv.hpp>
#include <opencv2/features2d.hpp>
int main(){
cv::Mat img1 = cv::imread("../1.png",1);
cv::Mat img2 = cv::imread("../2.png",1);
std::vector<cv::KeyPoint> KeyPoint1,KeyPoint2;
cv::Mat descriptors1,descriptors2;
cv::Ptr<cv::FeatureDetector> detector = cv::ORB::create();//represented as vectors in a multidimensional space
cv::Ptr<cv::DescriptorExtractor> descriptor = cv::ORB::create();//初始化描述子 descriptor为指针
cv::Ptr<cv::DescriptorMatcher> matcher = cv::DescriptorMatcher::create("BruteForce-Hamming");
detector->detect(img1,KeyPoint1);
detector->detect(img2,KeyPoint2);
descriptor->compute(img1,KeyPoint1,descriptors1);
descriptor->compute(img2,KeyPoint2,descriptors2);
// cv::Mat outimg1;
// cv::drawKeypoints(img1,KeyPoint1,outimg1);
// cv::imshow("img1特征点",outimg1);
//可以看出descriptor描述子每个元素都是0-255 意味着二进制的编码
//std::cout << descriptors1 << std::endl;
std::vector<cv::DMatch> matches;
matcher->match(descriptors1,descriptors2,matches);
//可以看到结果不理想,很多误匹配的点,需要设置阈值筛选
// cv::Mat matchimg;
// cv::drawMatches(img1,KeyPoint1,img2,KeyPoint2,matches,matchimg);
// cv::imshow("特征匹配",matchimg);
//迭代器遍历 for遍历也行
double min = 10000,max = 0;
min = min_element( matches.begin(), matches.end(), [](const cv::DMatch& m1, const cv::DMatch& m2) {return m1.distance<m2.distance;} )->distance;
max = max_element( matches.begin(), matches.end(), [](const cv::DMatch& m1, const cv::DMatch& m2) {return m1.distance<m2.distance;} )->distance;
std::vector<cv::DMatch> GoodMatches;
for(auto i = matches.begin(); i < matches.end(); i++){
if(i->distance <= std::max( 2*min, 30.0 )){
GoodMatches.push_back(*i);
}
}
cv::Mat GoodMatchimg;
cv::drawMatches(img1,KeyPoint1,img2,KeyPoint2,GoodMatches,GoodMatchimg);
cv::imshow("特征匹配",GoodMatchimg);
cvWaitKey(0);
return 0;
}其中imshow注意路径为"../xxxxx",文件放在build文件夹上层
使用的vscode联合CMake
CMakeLists:
cmake_minimum_required(VERSION 2.8)
project(vo1)
set(CMAKE_BUILD_TYPE "release")
set(CMAKE_CXX_FLAGS "-std=c++11 -O3")
list( APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/cmake_modules )
find_package( OpenCV REQUIRED)
include_directories("/usr/local/opencv3")
add_executable(FeatureExtraction feature_extraction.cpp)
target_link_libraries(FeatureExtraction ${OpenCV_LIBS})主要是find_package,之后把opencv3的路径包含进来即可,需要在安装的时候sudo make install指定目录OpenCV是包,LIBS是库,INCLUDE_DIR是头文件。
cmake .. make ./FeatureExtraction运行结果
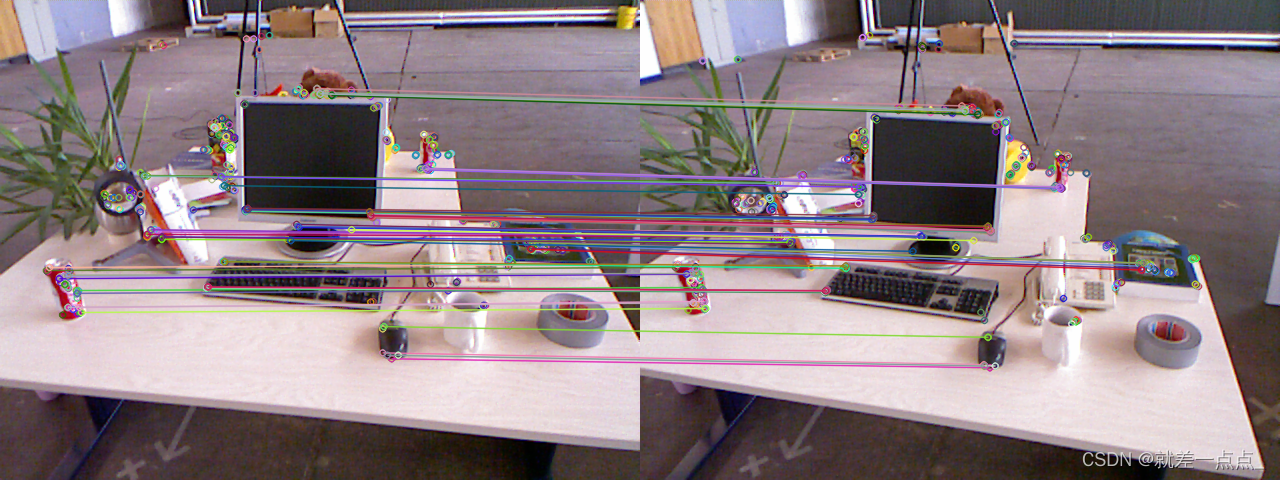















 3544
3544











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









