







背景
阿克曼底盘机器用纯跟踪算法跟踪轨迹时候,是底盘后轮中心跟踪轨迹,有时候希望机器是车中心跟踪轨迹或者车头跟踪轨迹,甚至是变化的跟随点去跟踪轨迹。此时就需要能满足任意点跟随的跟踪算法,从纯跟踪算法拓展开,得到滑动跟踪算法。
原理
原理图说明
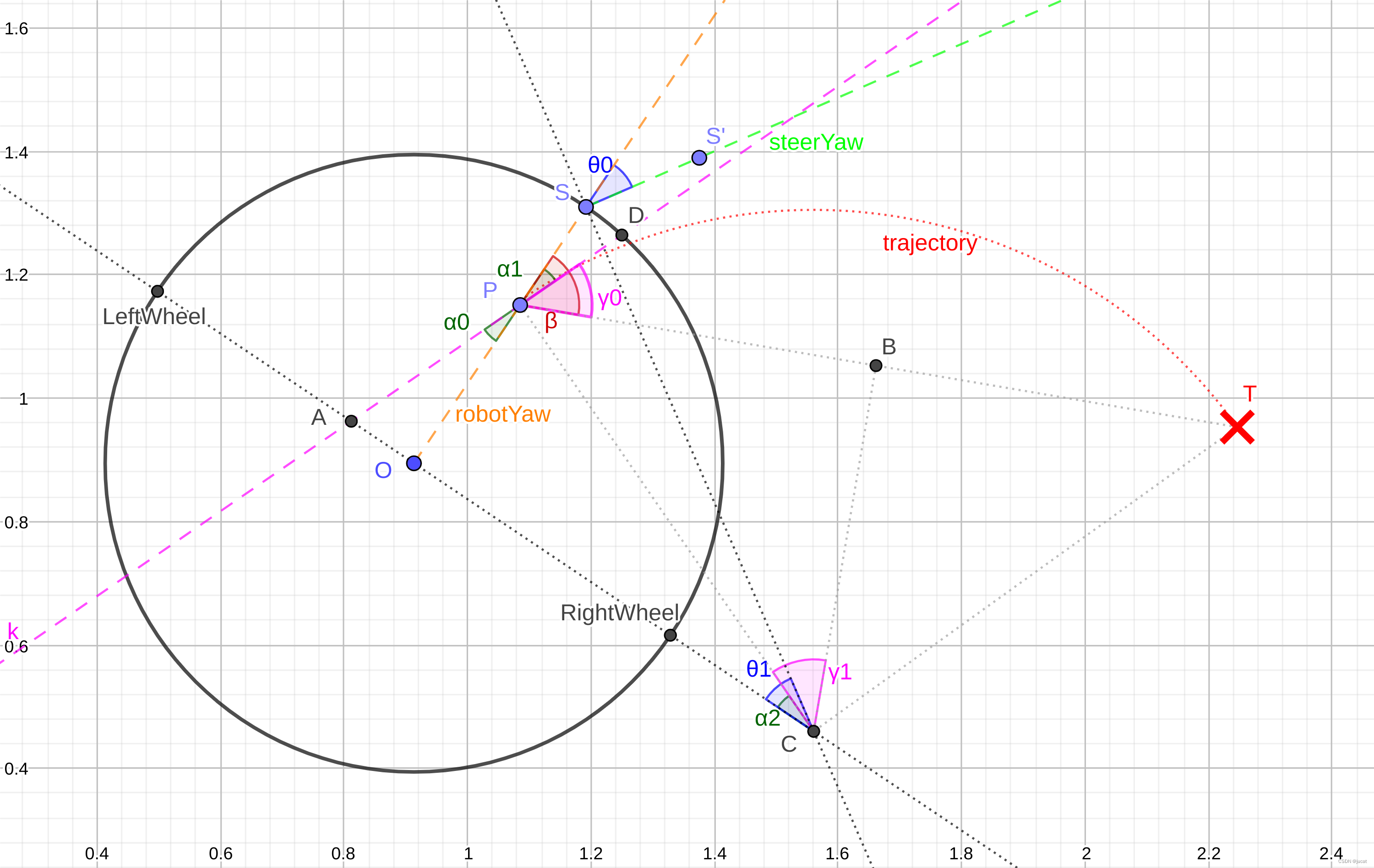
阿克曼机器后轮中心 O ,前轮 S,S' 为前轮朝向。射线 robotYaw(OS) 表示了机器朝向,射线 steerYaw(SS') 表示前轮角度。点 C 是阿克曼机器转向的旋转中心,点 P 是射线 OS 上的滑动点,曲线 trajectory 是点 P 在机器转向中的轨迹, 点 T 是想要跟踪的轨迹点。
滑动跟踪算法的目标是,控制机器前轮转向,使得机器中轴线上的滑动点 P 经过轨迹点 T。
公式
- 设线段 OS 为 l,线段 OC 为 m,前轮转角是 steerYaw 与 robotYaw 的夹角,设为角 θ。有方程 (1) :
- 设线段 OP 为 h,线段 PC 为点 P 的转弯半径,设 PC 为 r。过点 P 作转弯半径的切线,交机器于点 D,交后轮轴于点 A。角 α 为滑动点 P 运动方向与机器朝向 robotYaw 的夹角。有方程 (2) :
- 设线段 PT 为 e,调整好前轮转向,使点 T 在点 P 的转弯圆弧轨迹上时候,TP 在以点 C 为圆心的圆上。过点 C 作 CB 垂直于 PT,垂足为 B。此时角 DPT 和角 PCB 相同,设角 DPT 为 γ,设角 SPT 为 β。有方程 (3) :
- 点 OPC 形成直角三角形,有方程 (4) :
联立方程 (2) 和 (4) ,得到方程 (5) :
联立方程 (2) 和 (3),得到方程 (6) :
根据三角函数的两角和差公式,(6) 可以化为
联立方程 (1) (5) (7),得到滑动点 P 跟踪轨迹点 T 时候的前轮控制角 θ:
其中 l 是线段 OS,对应阿克曼底盘后轮中心到前轮的距离,即 wheel_base;
角 β 是滑动点 P 和跟踪点 T 与机器当前航向角的夹角;
e 是线段 PT,滑动点 P 和跟踪点 T 的距离;
h 是线段 PO,滑动点 P 到后轮中心 O 的距离;















 3079
3079











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









