阿克曼转向几何&纯路径跟踪算法
最新推荐文章于 2024-09-28 12:59:32 发布





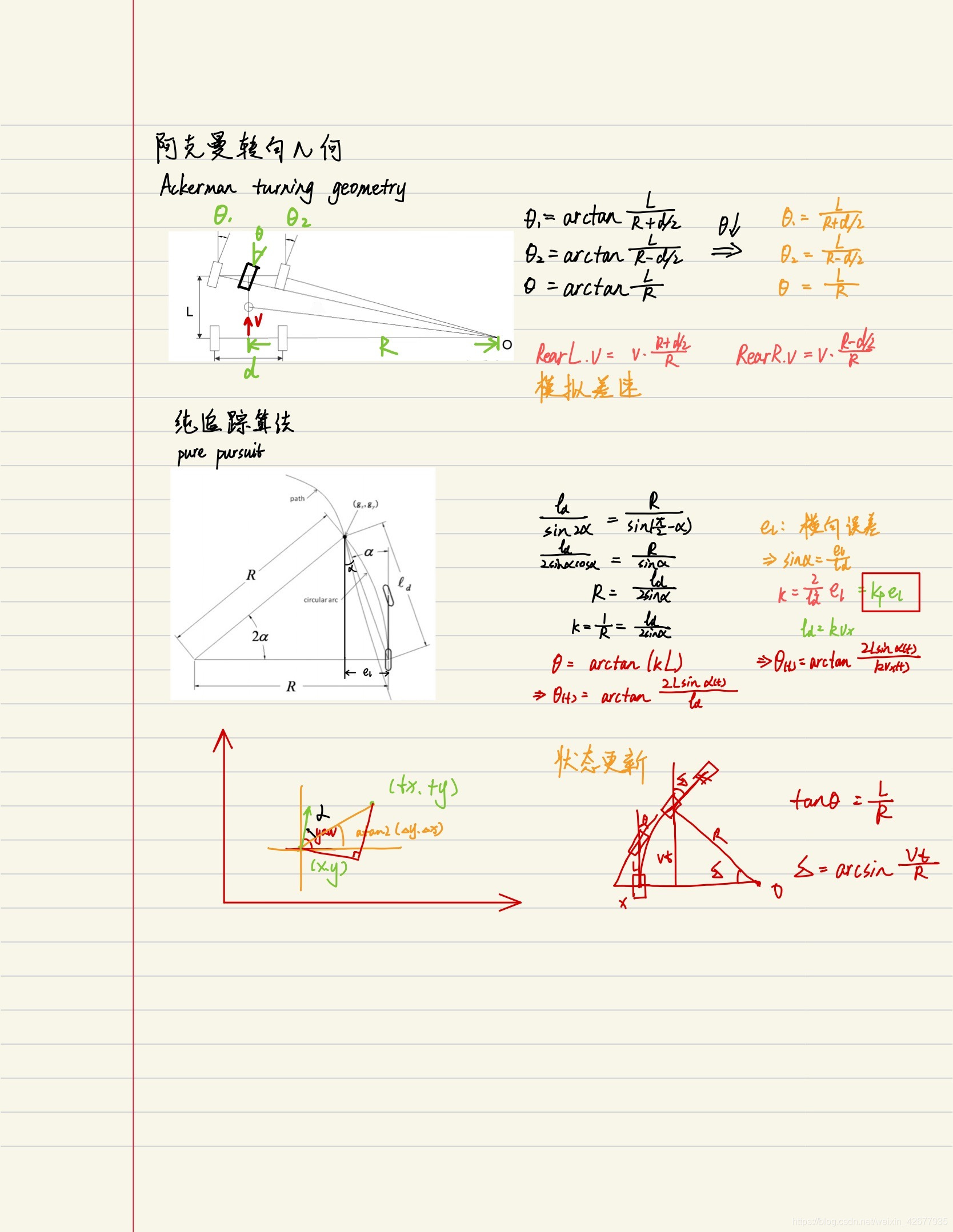
 本文介绍了一个基于纯追求算法的开源项目,该项目实现了路径跟踪功能。通过使用阿克曼转向几何原理,可以为机器人或者自动驾驶车辆提供精准的路径跟随能力。项目源码可在GitHub上找到,并附带了详细的数学推导过程。
本文介绍了一个基于纯追求算法的开源项目,该项目实现了路径跟踪功能。通过使用阿克曼转向几何原理,可以为机器人或者自动驾驶车辆提供精准的路径跟随能力。项目源码可在GitHub上找到,并附带了详细的数学推导过程。
本文介绍了一个基于纯追求算法的开源项目,该项目实现了路径跟踪功能。通过使用阿克曼转向几何原理,可以为机器人或者自动驾驶车辆提供精准的路径跟随能力。项目源码可在GitHub上找到,并附带了详细的数学推导过程。
本文介绍了一个基于纯追求算法的开源项目,该项目实现了路径跟踪功能。通过使用阿克曼转向几何原理,可以为机器人或者自动驾驶车辆提供精准的路径跟随能力。项目源码可在GitHub上找到,并附带了详细的数学推导过程。
 1431
1万+
1431
1万+






















 到【灌水乐园】发言
到【灌水乐园】发言






