







 本文介绍了基于蚯蚓算法(Earthworm Algorithm, EWA)的复杂地形无人机避障三维航迹规划方法。该算法通过模拟蚯蚓在土壤中的行为,能在复杂地形中找到最优避障路径。文章详细阐述了算法步骤,包括蚯蚓蠕动行为、邻域搜索和种群协作,并讨论了其优势,如适应复杂地形、全局优化能力和自适应性。还提到了在MATLAB中实现的基本步骤和涉及的关键函数。"
45418067,2120067,机房收费系统:配置文件详解与应用,"['系统配置', '数据库管理', '架构设计', '软件开发', '编程实践']
本文介绍了基于蚯蚓算法(Earthworm Algorithm, EWA)的复杂地形无人机避障三维航迹规划方法。该算法通过模拟蚯蚓在土壤中的行为,能在复杂地形中找到最优避障路径。文章详细阐述了算法步骤,包括蚯蚓蠕动行为、邻域搜索和种群协作,并讨论了其优势,如适应复杂地形、全局优化能力和自适应性。还提到了在MATLAB中实现的基本步骤和涉及的关键函数。"
45418067,2120067,机房收费系统:配置文件详解与应用,"['系统配置', '数据库管理', '架构设计', '软件开发', '编程实践']
【无人机三维路径规划】基于蚯蚓算法EWA实现复杂地形无人机避障三维航迹规划
文章介绍
基于蚯蚓算法(Earthworm Algorithm, EWA)实现复杂地形下的无人机避障三维航迹规划是一种用于优化无人机路径的算法。下面是对该算法的介绍:
-
蚯蚓算法(Earthworm Algorithm, EWA):
- 蚯蚓算法是一种仿生算法,灵感来自蚯蚓在土壤中穿行的行为。它模拟了蚯蚓的非线性运动和蠕动行为,用于解决路径规划和优化问题。
- 蚯蚓算法通过在搜索空间中生成一组蚯蚓个体,并使用蠕动行为和邻域搜索来逐步改进解决方案。蚯蚓个体根据其当前位置和目标函数值进行移动,并通过交互和合作来寻找更优的解决方案。
-
复杂地形无人机避障:
- 在复杂地形环境中,无人机需要规划避开障碍物的三维航迹,以实现安全、高效的飞行。
- 避障三维航迹规划算法需要考虑地形高度、障碍物的位置和形状、无人机的动力学约束等因素,以生成避开障碍物的优化飞行路径。
-
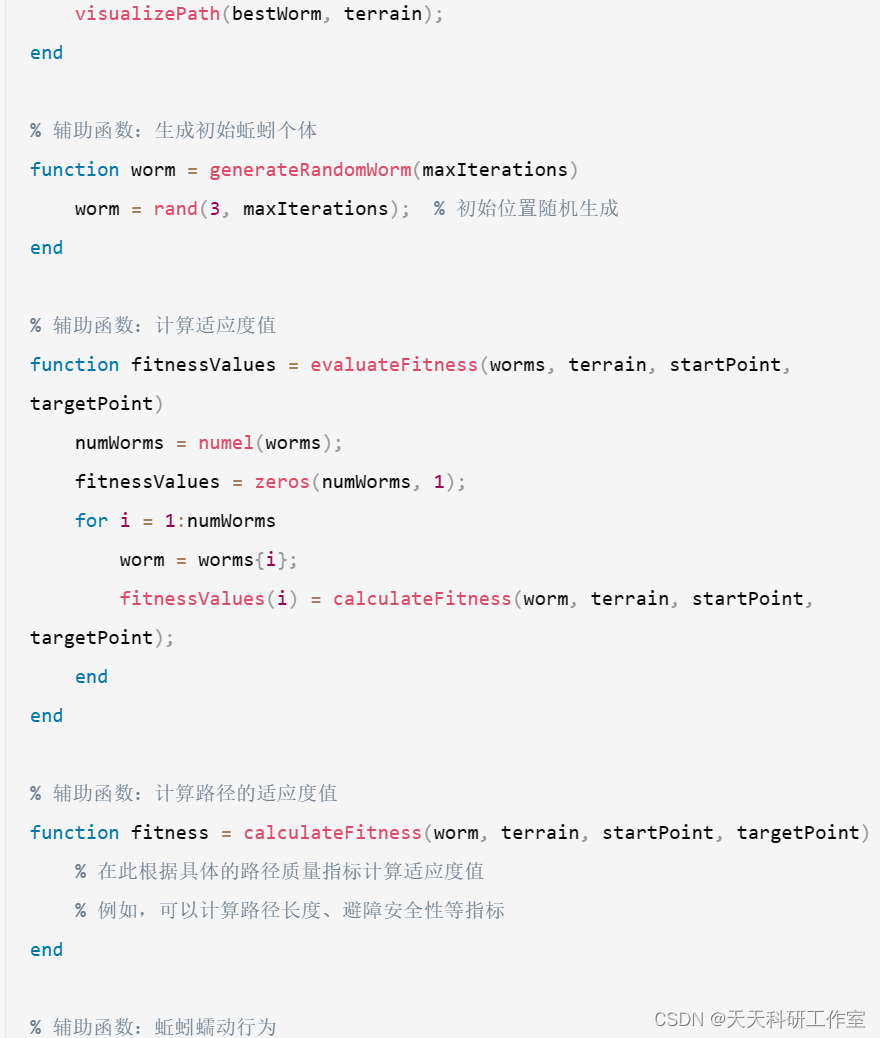
实现复杂地形无人机避障三维航迹规划的步骤:
- 初始化:定义无人机的起始位置、目标位置和避障环境的地形数据。
- 生成蚯蚓个体群:在搜索空间中随机生成一组蚯蚓个体,每个个体代表一条可能的飞行路径。
- 评估目标函数:根据路径的质量指标,如路径长度、避障安全性

 订阅专栏 解锁全文
订阅专栏 解锁全文
















 1546
1546

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











