






基于扩展卡尔曼滤波EKF和模型预测控制MPC,自动泊车场景建模开发,文复现。
MATLAB(工程项目线上支持)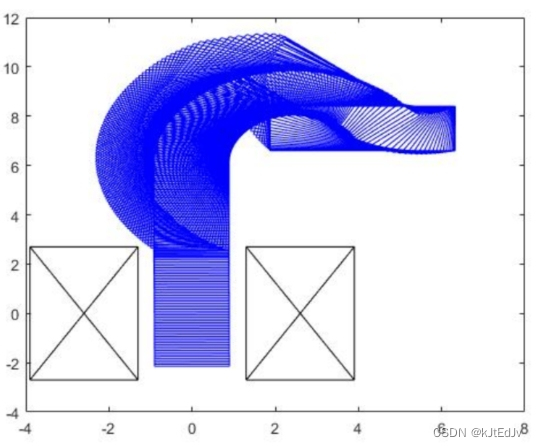
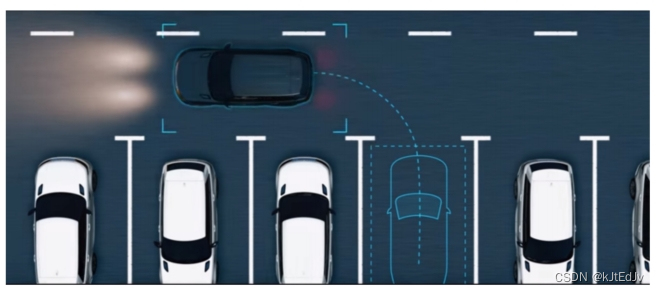
随着科技的不断发展,自动驾驶技术在汽车行业中得到了广泛应用。自动泊车技术是其中的一项重要领域,它可以为驾驶者提供更加便捷的停车体验。但是,自动泊车技术的实现面临着很多挑战,例如如何准确建立模型,如何有效地控制车辆运动,如何适应各种环境等。本文将基于扩展卡尔曼滤波EKF和模型预测控制MPC,对自动泊车场景建模的开发进行文复现。
首先,对于自动泊车场景建模的开发,我们需要准确的建立车辆的动力学模型。根据车辆运动学原理,我们可以将车辆的状态变量分为位置、速度、方向角等多个维度。然后,利用扩展卡尔曼滤波EKF来对车辆的状态进行预测和估计,从而实现对车辆的动态建模。EKF是一种基于卡尔曼滤波的扩展算法,它能够有效地处理非线性问题,对于车辆的动力学模型建立非常适用。
其次,对于自动泊车场景建模的开发,我们需要实现有效的控制算法,来控制车辆的运动。模型预测控制MPC是一种在控制领域中广泛应用的算法,它通过对离散时间系统的预测模型进行优化,得到最优的控制策略。在自动泊车场景中,我们可以将车辆的运动状态建立为一个离散时间系统,并利用MPC来生成最优的控制信号,从而实现车辆的自动泊车。
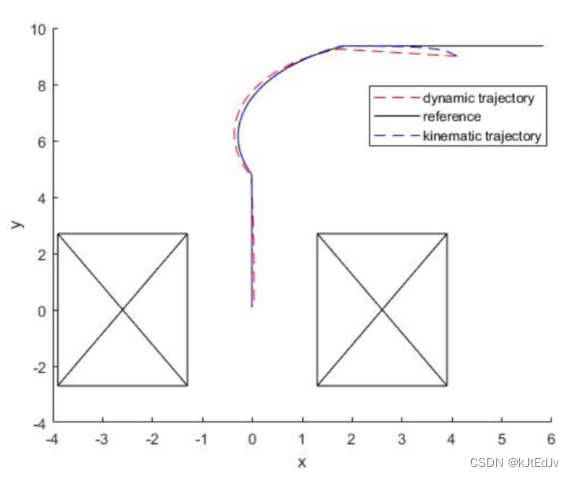
最后,我们需要对开发的场景建模进行测试和验证,以确保它能够满足实际的应用需求。MATLAB作为一种强大的工程项目线上支持工具,可以提供一系列的仿真和实验环境,帮助我们对开发的场景建模进行测试和验证。通过这些测试和验证,我们可以进一步优化和完善自动泊车场景建模的开发。
综上所述,基于扩展卡尔曼滤波EKF和模型预测控制MPC,自动泊车场景建模的开发是一个复杂而又重要的任务。通过对车辆的动力学建模、控制算法的设计、测试和验证等多个方面的综合考虑,我们可以实现一个高效、稳定、准确的自动泊车系统。同时,MATLAB作为强大的工程项目线上支持工具,也为自动泊车场景建模的开发提供了重要的支持和保障。
相关代码,程序地址:http://lanzouw.top/652710440176.html















 209
209











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









