






 本文详细探讨了Cruise双电机四轮驱动模型和单电机前驱模型,涉及分层建模、控制策略、仿真方法,以及MATLAB/Simulink等工具的应用。SP资料为深入学习提供了支持。
本文详细探讨了Cruise双电机四轮驱动模型和单电机前驱模型,涉及分层建模、控制策略、仿真方法,以及MATLAB/Simulink等工具的应用。SP资料为深入学习提供了支持。
Cruise双电机四轮驱动模型和单电机前驱模型,分层建模,具有控制策略模型,三种联合仿真方式都可以运行,以及sp资料。
ID:8439722752418865
车辆仿真
Cruise双电机四轮驱动模型和单电机前驱模型是现代机动车辆领域中的两个重要研究对象。为了更好地理解和分析这两种模型的性能和行为,本文将从分层建模、控制策略模型以及联合仿真方式等方面展开研究,并提供相关的SP资料。
首先,我们来看一下这两种模型的常见特点和优势。Cruise双电机四轮驱动模型采用双电机驱动方式,能够更灵活地调整车辆的动力输出和行驶性能。相比之下,单电机前驱模型则更加简单和经济,适用于一些对动力输出要求相对较低的场景。通过对这两种模型进行分层建模,我们可以更好地对它们进行理论分析和实际应用。
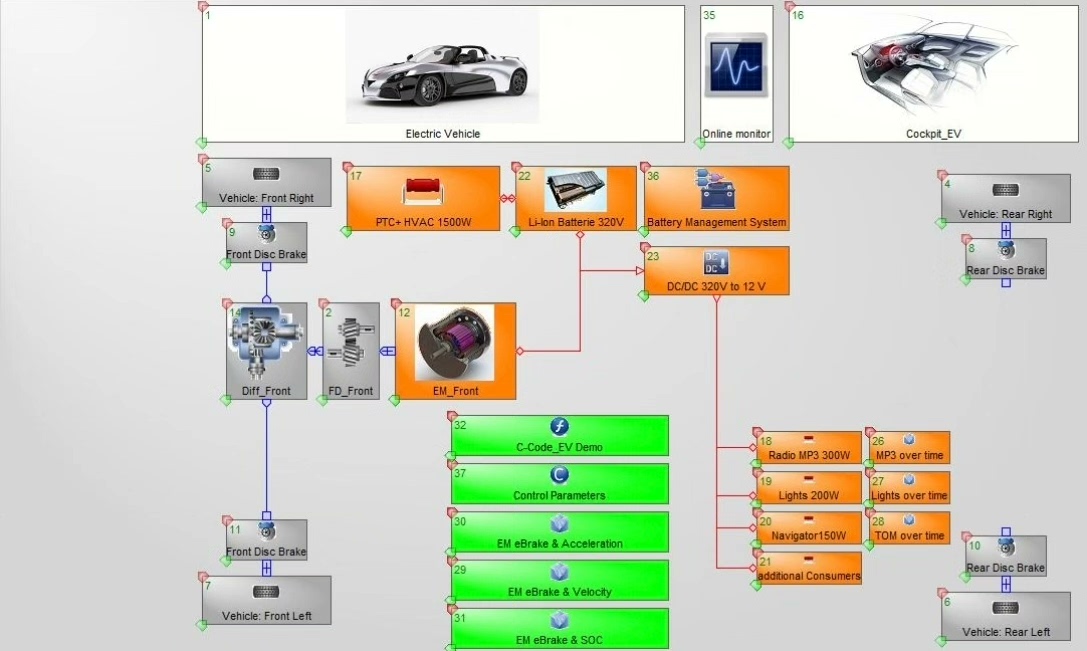
在分层建模方面,我们可以将Cruise双电机四轮驱动模型和单电机前驱模型分解为多个子系统,包括车辆动力系统、传动系统、悬挂系统等。通过对每个子系统进行建模和仿真,可以更加全面地了解和评估整个车辆系统的性能和行为。在这个过程中,我们可以使用现代建模工具和软件,如MATLAB/Simulink,来实现系统的模拟和仿真。
针对这两种模型的控制策略模型也是非常重要的研究方向。对于Cruise双电机四轮驱动模型,我们可以采用PID控制器或者模型预测控制器等方法来实现对动力输出的精确控制。而对于单电机前驱模型,我们可以通过简单的速度控制方式来调整车辆的行驶速度和方向。通过对不同控制策略的比较和分析,我们可以找到最优的控制方案,提高车辆的性能和稳定性。
为了更加全面地研究这两种模型,我们还可以使用三种联合仿真方式进行实验和评估。首先是硬件-软件联合仿真方式,通过将实际的硬件系统和虚拟的软件系统进行联合,可以更加真实地模拟车辆的实际行驶情况。其次是软件-软件联合仿真方式,通过将不同的建模软件进行联合,可以更好地模拟车辆的各个子系统之间的相互作用。最后是硬件-硬件联合仿真方式,通过将不同的物理实验设备进行联合,可以更加准确地评估车辆的性能和行为。
除了分层建模、控制策略模型和联合仿真方式,本文还提供了相关的SP资料,供读者进一步学习和研究。通过阅读和理解这些资料,读者可以更好地掌握Cruise双电机四轮驱动模型和单电机前驱模型的原理和应用。
综上所述,本文围绕Cruise双电机四轮驱动模型和单电机前驱模型展开了深入的研究和分析。通过分层建模、控制策略模型和联合仿真方式等方面的研究,我们可以更好地理解和评估这两种模型的性能和行为。同时,提供的SP资料也为读者进一步研究和应用提供了重要参考。希望本文能够为广大程序员社区的读者带来启发和帮助,促进技术交流和创新。
以上相关代码,程序地址:http://wekup.cn/722752418865.html















 404
404

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









