






适用方向:基于LQR控制算法的直接横摆力矩控制(DYC)的四轮独立电驱动汽车的横向稳定性控制研究
主要内容:利用carsim建模,在simulink中搭建控制器,然后进行联合。
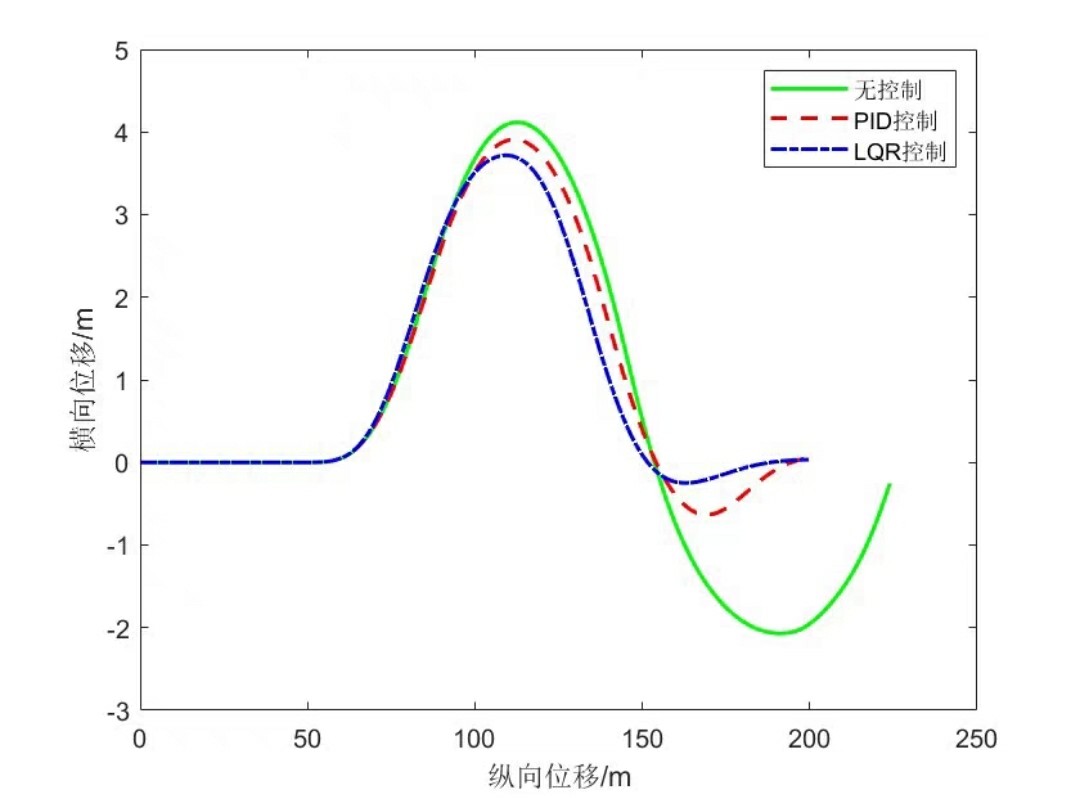
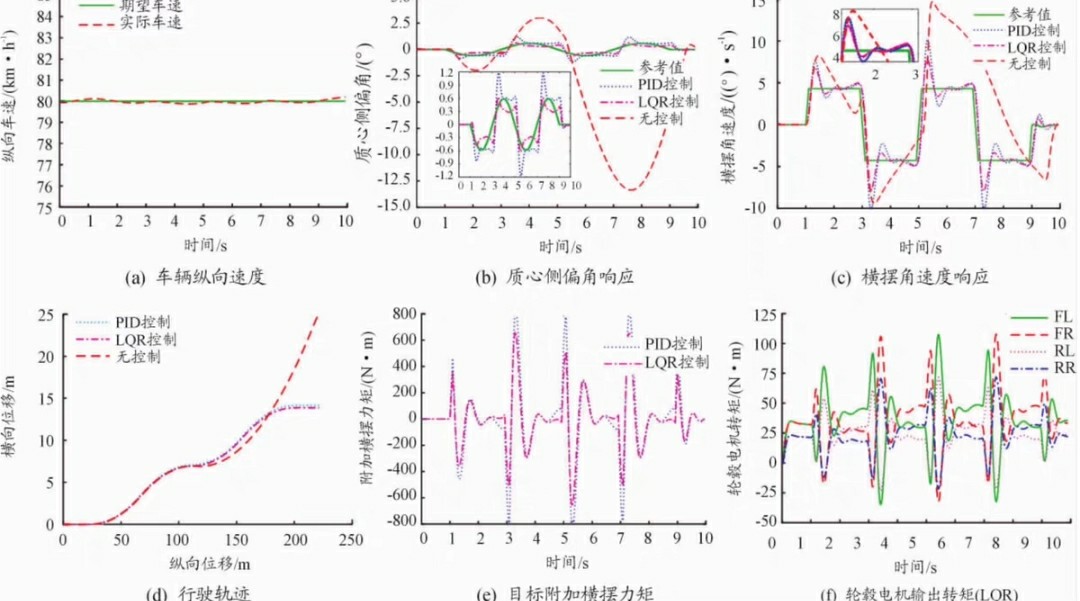
实现汽车在高速低附着路面下完成双移线工况的仿真。
可以与PID控制和无控制车辆进行对比,从而验证所设计LQR控制器的稳定性和有效性。
模型包含:纵向驾驶员模型、电机模型、车辆二自由度参考模型、LQR控制器等。
ID:21130745040887335
灰色格调
基于LQR控制算法的直接横摆力矩控制(DYC)是指通过在汽车横向稳定性控制中应用LQR控制器,实现四轮独立电驱动汽车在高速低附着路面下完成双移线工况的仿真。本文旨在通过利用Carsim建模和Simulink控制器的联合使用,对LQR控制器在该场景下的稳定性和有效性进行验证。
在研究中,我们建立了一个完整的模型,包括纵向驾驶员模型、电机模型、车辆二自由度参考模型以及LQR控制器。通过Carsim建模,我们可以准确模拟车辆在高速低附着路面下的行驶情况。而Simulink中的控制器则实现了横向稳定性控制的具体算法。
首先,我们需要建立纵向驾驶员模型。纵向驾驶员模型主要考虑车辆的加速度和制动等动力学特性,并将其作为输入信号传递给电机模型。电机模型则模拟了电驱动汽车的动力系统,其中包括电机的转矩输出和动力学响应等。
接下来,我们建立了车辆二自由度参考模型。该模型用于描述车辆的横向运动和姿态变化。通过对车辆的横向位移和侧滑角的控制,我们可以实现对车辆横向稳定性的控制。而LQR控制器则使用车辆二自由度参考模型的状态信息,并根据优化目标进行控制策略的设计。
通过对比PID控制和无控制车辆的仿真结果,我们可以验证所设计的LQR控制器的稳定性和有效性。在高速低附着路面下完成双移线工况的仿真实验中,LQR控制器能够实现更好的横向稳定性控制效果。
总结起来,基于LQR控制算法的直接横摆力矩控制(DYC)是一种应用于四轮独立电驱动汽车的横向稳定性控制方法。通过利用Carsim建模和Simulink控制器的联合使用,我们可以验证所设计的LQR控制器在高速低附着路面下的稳定性和有效性。本文的研究工作为电驱动汽车的横向稳定性控制提供了理论依据和实践指导。
在未来的研究中,我们可以进一步优化LQR控制算法并考虑更多的实际因素,以提升车辆在各种工况下的横向稳定性控制能力。此外,还可以研究不同控制算法的对比以及在其他车辆动力学模型中的应用,以推动电驱动汽车的横向稳定性控制技术的发展。
【相关代码,程序地址】:http://fansik.cn/745040887335.html
















 927
927

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









