






自动驾驶车道保持LKA,基于LQR算法,carsim与simulink联合仿真,包括说明书及LQR的推导过程(每一步怎么做的)
ID:2630678009782434
1232力
自动驾驶技术是近年来信息技术领域的热点之一,其具备的潜在商业应用价值和科技突破引发了业界的广泛关注。其中,自动驾驶车道保持系统是自动驾驶技术中的重要组成部分。本文将基于LQR算法,结合Carsim与Simulink软件进行联合仿真,详细介绍自动驾驶车道保持系统的设计流程,并给出相应的说明书及LQR算法的推导过程。
自动驾驶车道保持系统是在智能车辆中实现自动操控车辆保持在预设车道的系统。其核心是通过算法对车辆的动力学进行建模和控制,实现车辆的稳定行驶。LQR(线性二次型调节)算法是一种经典的控制算法,能够使车辆在不同工况下,根据控制要求自动调整车辆的控制参数,从而实现车辆的车道保持功能。
首先,我们需要对Carsim进行建模,包括车辆的物理特性、动力学特性等参数的设定。Carsim是一款用于车辆动力学仿真的软件,通过建立车辆的数学模型,可以对车辆的运动状态进行模拟仿真。在Carsim中,我们需要设定车辆的质量、车辆的惯性矩阵、车辆的轮胎特性等参数,以便在仿真过程中准确地模拟车辆的运动行为。
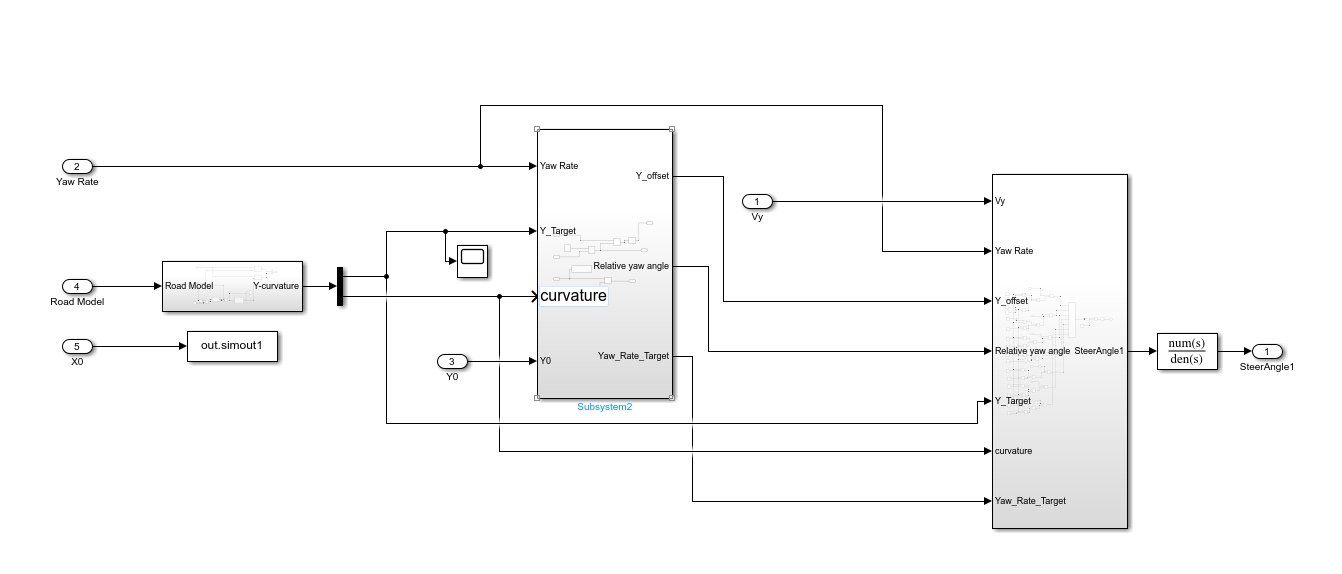
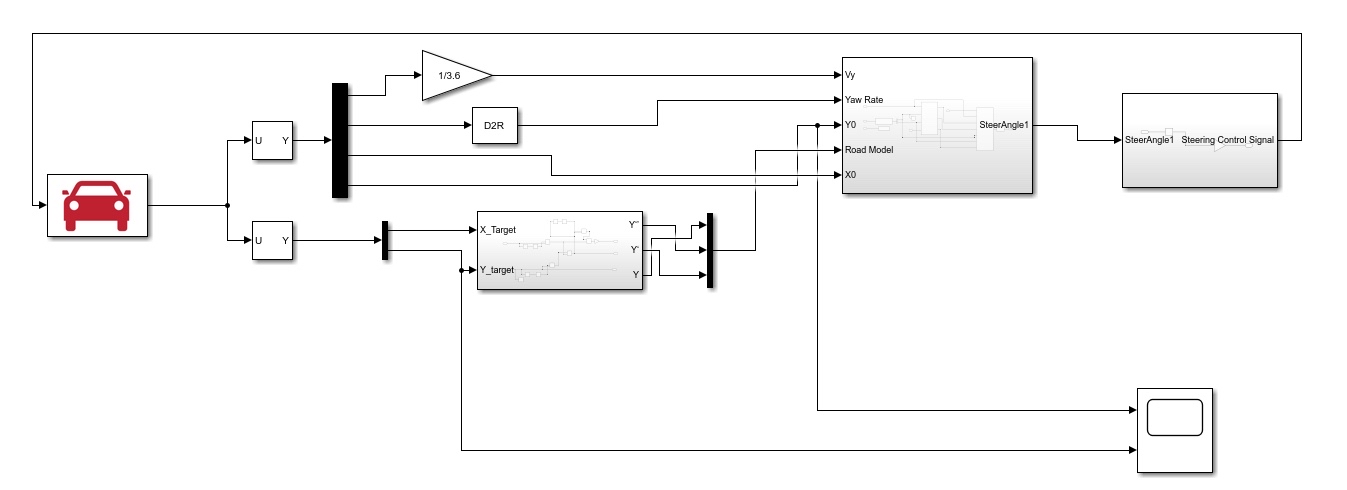
接下来,我们需要将Carsim与Simulink进行联合仿真。Simulink是MATLAB的一个功能强大的仿真平台,可以通过建立模型和对模型进行仿真,实现对复杂系统的控制和分析。在Simulink中,我们将通过LQR算法对Carsim建立的车辆模型进行控制。首先,我们需要将车辆模型转化为状态空间模型,即将车辆的动力学方程转化为状态方程和输出方程。然后,在Simulink中,我们建立LQR控制器模型,并将其与车辆模型进行连接。最后,通过对控制器进行参数调整和仿真测试,优化控制器的响应性能,确保车辆能够稳定地保持在预设车道。
在LQR算法的推导过程中,我们首先需要建立车辆的状态空间模型,包括车辆的状态向量和输入向量,以及车辆的状态方程和输出方程。然后,根据车辆的状态方程和输出方程,我们可以建立车辆的线性化模型。接下来,我们需要设定控制目标,即车辆的期望状态和期望输出。通过使用二次型性能指标,我们可以将车辆的控制问题转化为一个最优化问题,即如何选择控制器的参数,使得车辆的性能指标最小化。最后,我们使用最优化算法对最优化问题进行求解,得到最优的控制器参数。
综上所述,本文详细介绍了自动驾驶车道保持系统的设计流程,从Carsim的建模到Simulink的联合仿真,再到LQR算法的推导过程,完整地阐述了自动驾驶技术中车辆稳定行驶的关键步骤。通过本文的学习,读者可以了解到自动驾驶车道保持系统的工作原理和设计流程,为后续的研究和应用提供了参考。同时,本文还通过详细的说明书和推导过程,使读者能够深入理解LQR算法在自动驾驶车道保持系统中的应用。希望本文能够对读者在自动驾驶技术领域的学习和研究起到一定的指导作用。
(注:本文不包含参考文献和示例代码。)
以上相关代码,程序地址:http://wekup.cn/678009782434.html















 882
882











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









