






 本文探讨了如何利用Carsim和Simulink进行自动驾驶中路径跟踪控制的仿真,结合LQR算法优化车辆沿着预定轨迹行驶。介绍了模型建立、轨迹规划及控制输入计算的过程,并强调了参数调节和性能优化的重要性。
本文探讨了如何利用Carsim和Simulink进行自动驾驶中路径跟踪控制的仿真,结合LQR算法优化车辆沿着预定轨迹行驶。介绍了模型建立、轨迹规划及控制输入计算的过程,并强调了参数调节和性能优化的重要性。
自动驾驶,carsim,simulink联合仿真,基于lqr算法的路径跟踪控制,
carsim2019,matlab2018,以上。
ID:8325703803692963
规控算法工程师
基于LQR算法的路径跟踪控制是自动驾驶技术领域中的一个重要研究方向。在实现自动驾驶的过程中,路径跟踪控制是确保车辆按照预定轨迹行驶的核心环节之一。为了实现高效且精确的路径跟踪,研究者们借助Carsim和Simulink联合仿真的方法进行探索。
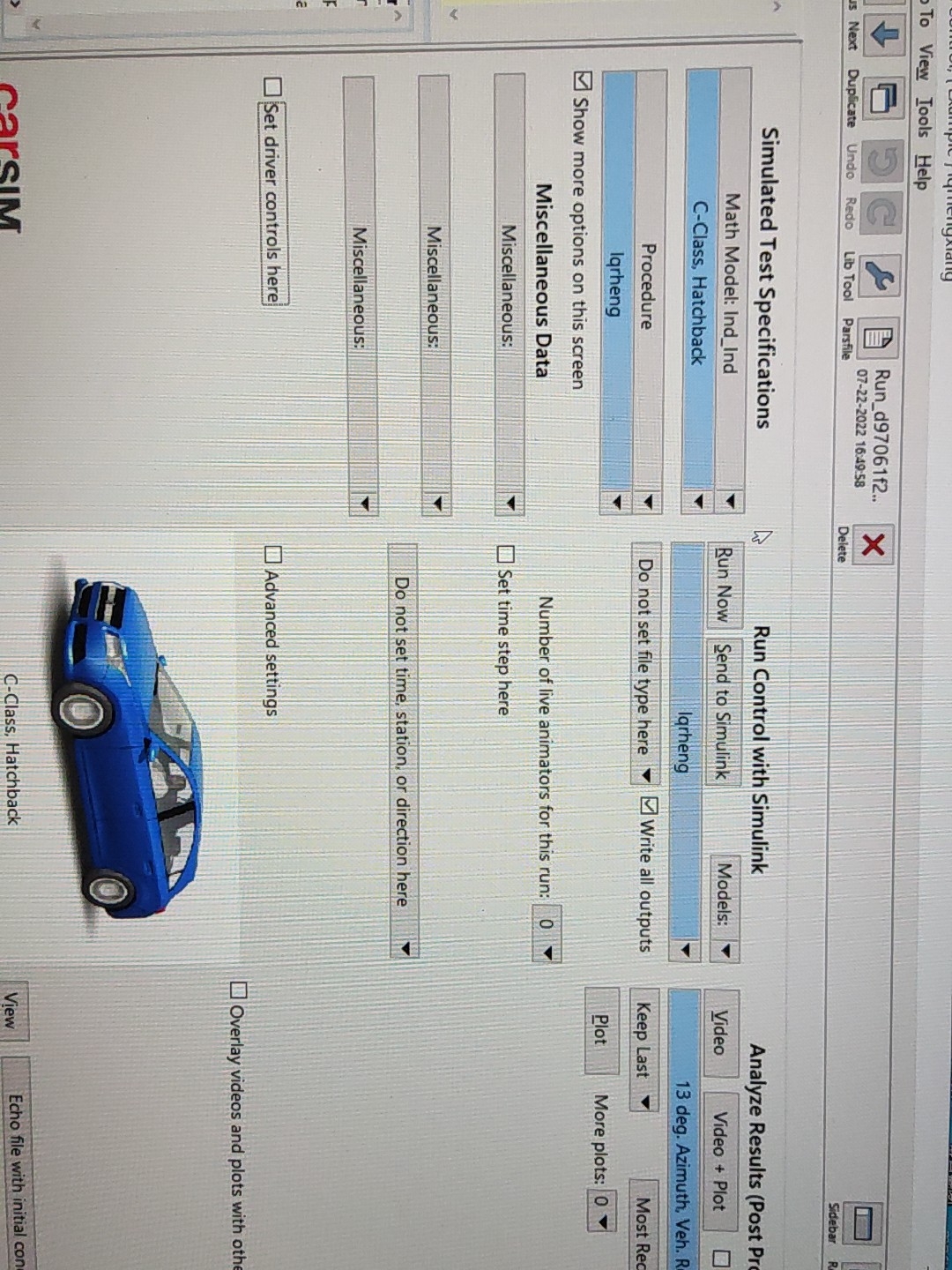
首先,让我们来了解一下Carsim和Simulink这两个工具。Carsim是一种车辆动力学仿真软件,它能够实现对车辆运动学和动力学的模拟,并提供了丰富的车辆特性参数和驾驶场景设置选项。而Simulink是Matlab下的一款可视化建模和仿真工具,它提供了强大的图形化界面和丰富的仿真模块,可以方便地进行动态系统建模和仿真分析。
在路径跟踪控制中,LQR(线性二次调节)算法被广泛应用。该算法通过在线性化车辆模型和轨迹参考路径,计算出最优控制输入,使得车辆可以沿着预定轨迹稳定行驶。LQR算法的优势在于能够在大范围的工作点上实现系统的快速响应和良好的鲁棒性。
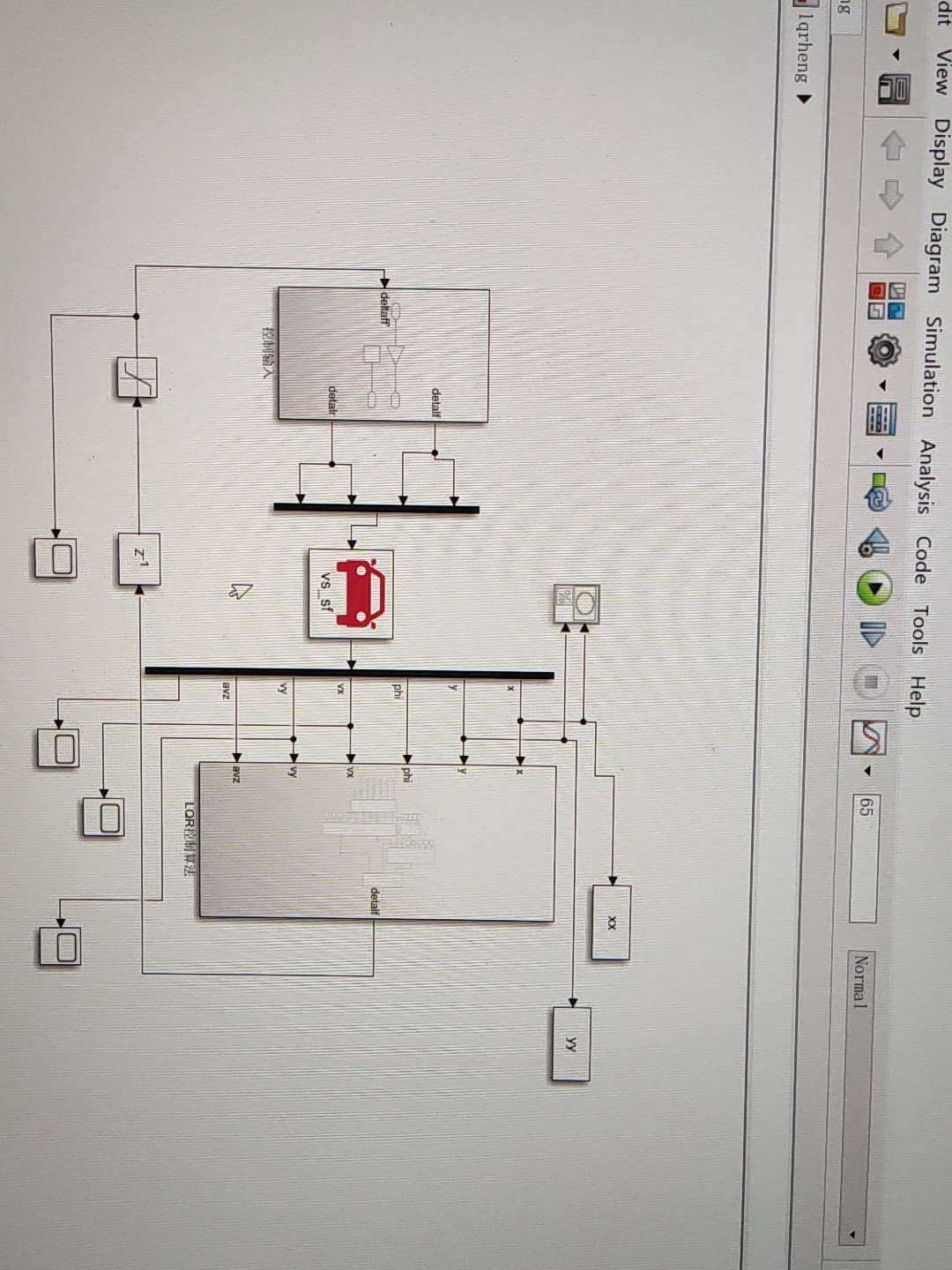
在Carsim和Simulink联合仿真中,首先需要建立车辆的动力学模型。模型的建立需要考虑车辆的质量、惯性矩阵、轮胎参数等因素,并结合实际车辆的特性进行参数校准。通过Carsim的模型建立工具以及Simulink的S-Function模块,可以实现车辆动力学模型的快速建立和仿真验证。
在得到车辆的动力学模型后,需要将路径跟踪控制算法与模型进行集成。首先,通过仿真环境中的路径规划模块生成预定轨迹,包括车辆要行驶的轨迹形状和参考速度曲线。然后,将预定轨迹和车辆动力学模型输入到LQR算法中,计算出最优的控制输入。最后,将控制输入与车辆模型进行反馈控制,使车辆按照预定轨迹行驶。
值得注意的是,由于路径跟踪控制的复杂性和车辆的多样性,该技术涉及到较多的参数调节和性能优化。在实际应用中,研究者们需要根据具体场景和需求进行额外的参数调整和优化,以确保路径跟踪控制的稳定性和精确性。
最后,需要强调的是,以上讨论的内容不包含指导。如果需要针对特定场景的路径跟踪控制指导,可能需要额外收费。同时,我们也提醒用户在购买前慎重考虑,一旦发货将无法退换。如果用户有特殊需求,也可以选择支付额外费用实现自定义轨迹的功能。
综上所述,基于LQR算法的路径跟踪控制是一项重要的自动驾驶技术,Carsim和Simulink联合仿真为其提供了有效的工具和方法。通过结合车辆动力学模型、轨迹规划和LQR算法,我们能够实现车辆沿着预定轨迹精确行驶的目标。然而,为了确保路径跟踪控制的性能和稳定性,研究者们还需要进行进一步的参数调节和性能优化。希望以上内容能为读者提供有关基于LQR算法的路径跟踪控制的一些参考和思路。
(注:本文仅围绕给定的关键词和短语编写,不含参考文献和示例代码。)
以上相关代码,程序地址:http://wekup.cn/703803692963.html















 347
347

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









