






1.直流电机:
利用电磁感应原理 将直流电能转化为机械能的电机
2.特点:
1.调速范围广
2.启动制动转矩大
3.过载能力强
4.易于控制
所以直流电机应用在对调速要求高的地方
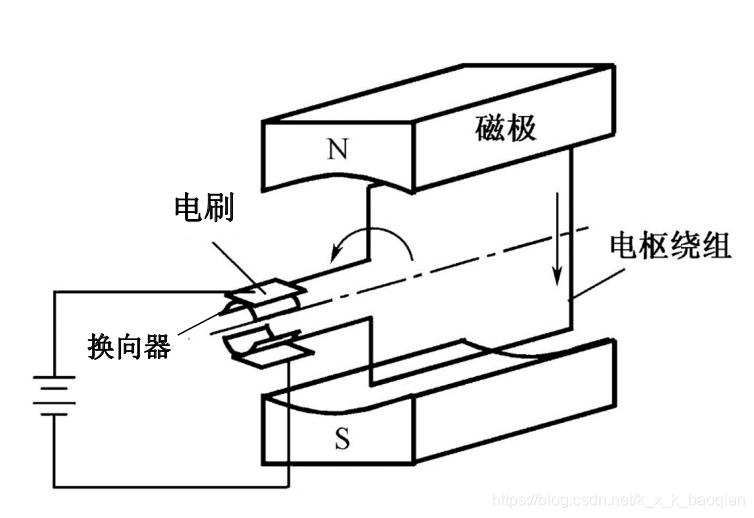
3.原理:
电枢绕组中有直流电的时候,在给定磁场的作用下,产生电磁力,使得绕组转动
 4.结构
4.结构
1.定子 + 转子 (转的就是转子 不动的就是定子)
2.磁极,电磁绕组,换向器+电刷
磁极在定子上,电磁绕组在转子上
电刷在定子上,换向器在转子上
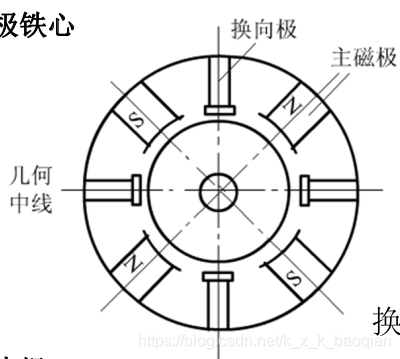
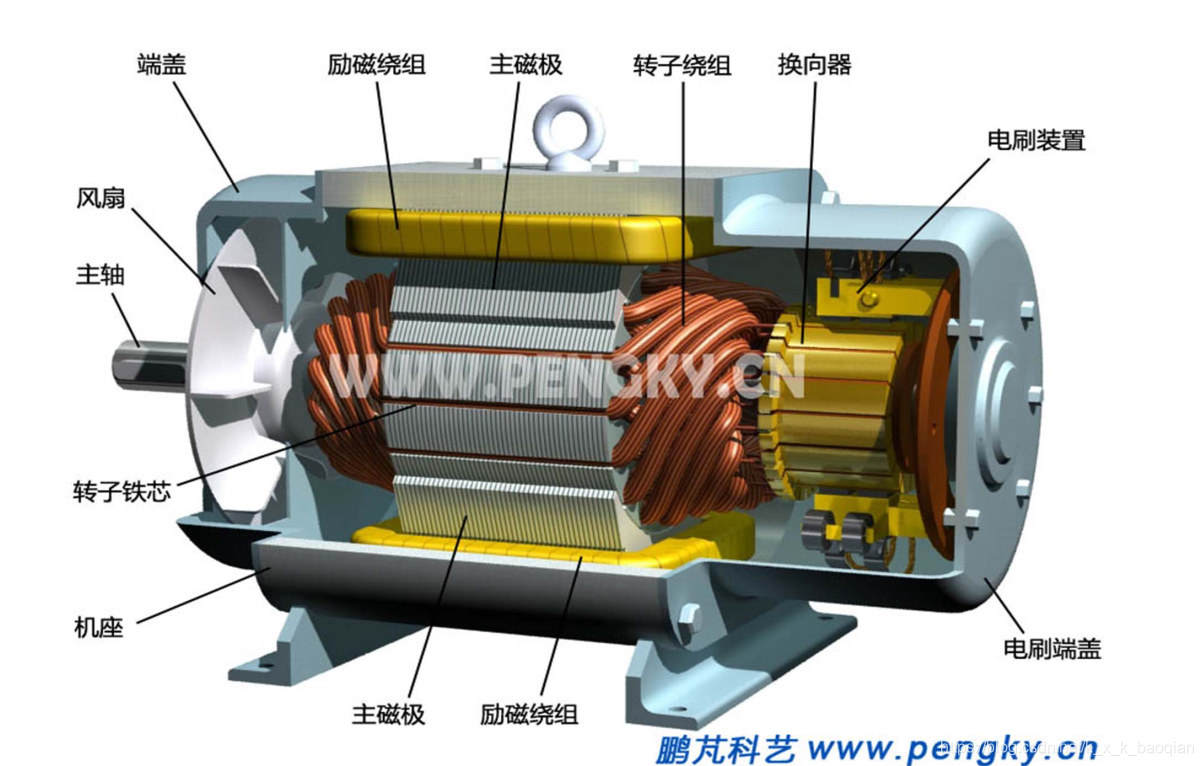
定子的结构:
1.主磁极:定磁铁心+励磁绕组
用来建立主磁场,N/S成对出现
2.换向极:铁心+绕组
铁心一般是一整块钢组成换向极,放在相邻两个主磁极之间
改善了转向电机的转向
3.基座:固定主磁极,也是磁路的一部分
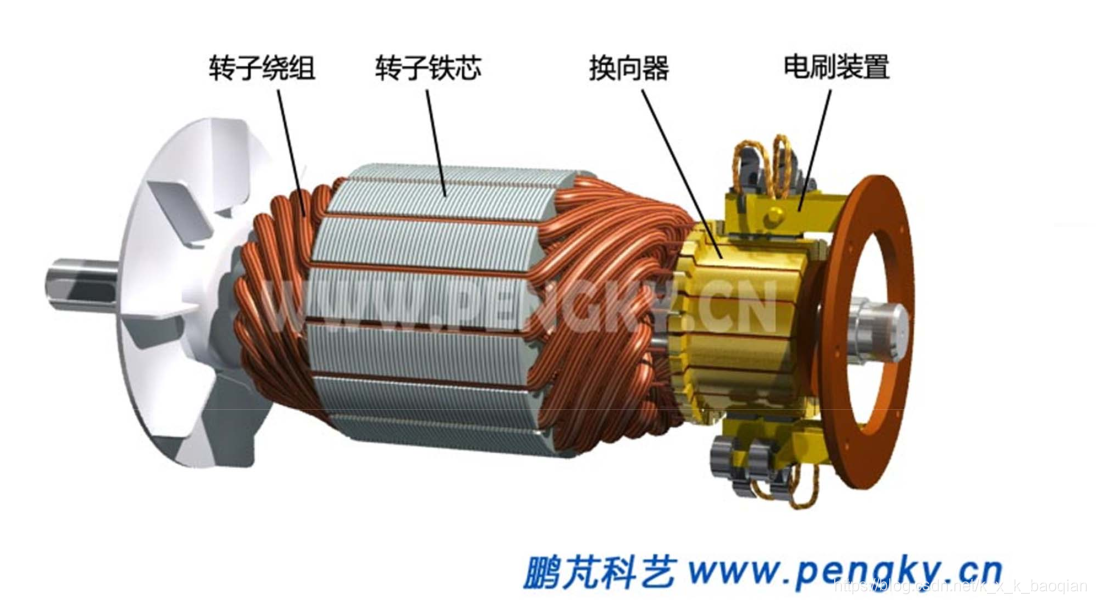
4.电刷装置:电刷+刷握+刷杆+弹簧压片
电刷连接转动和静止的电路
说实话我觉得上课老师带两个实物大家传阅一下,就很好理解
没办法,给两张图看一下吧,其中很多东西吧,感觉么必要列出来说
比如刷杆。。不就是那个架子吗,不看图还真以为是什么不得了的东西

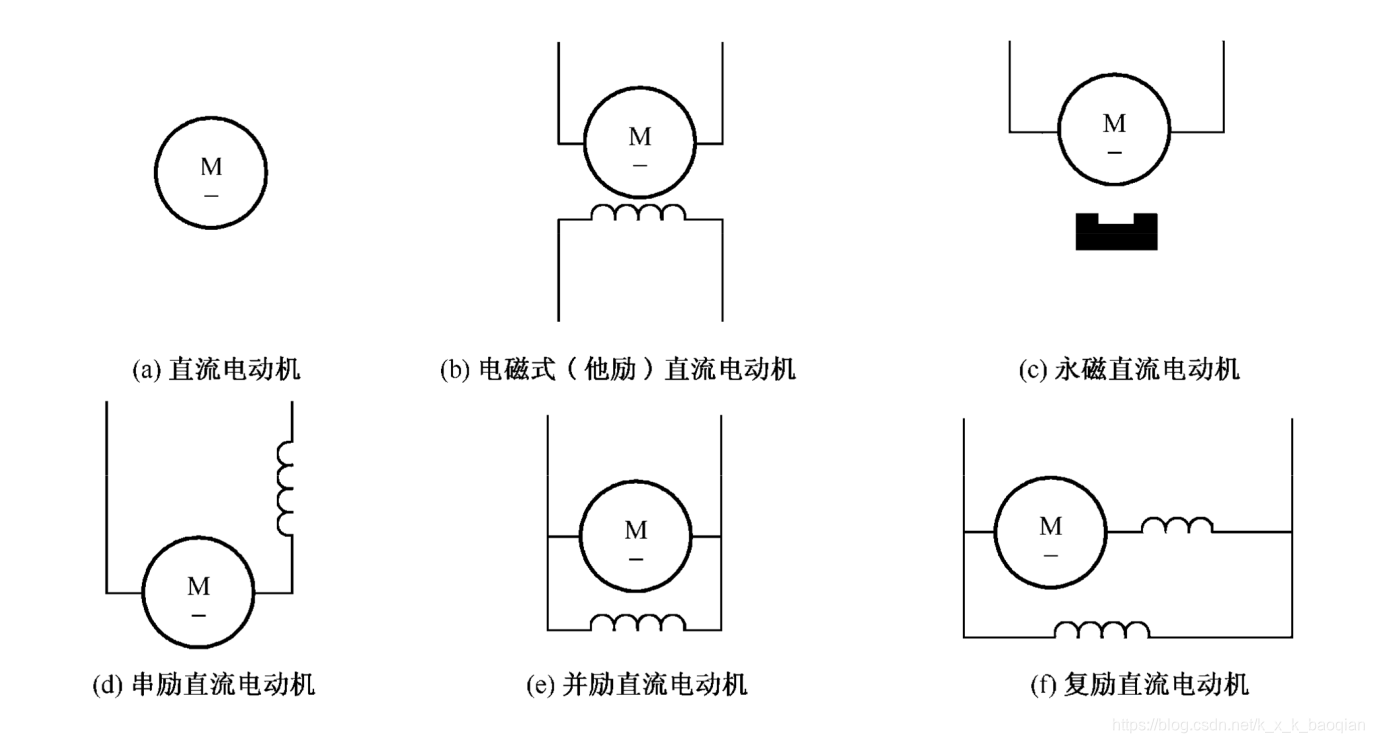
由此分类直流电机
1.电磁式直流电机:用直流电产生恒定磁场
适用于中大型电机
2.永磁式直流电机:用永磁体构成磁场
相比电磁式,体积小、重量轻,但是磁场不稳定
适用小型电机
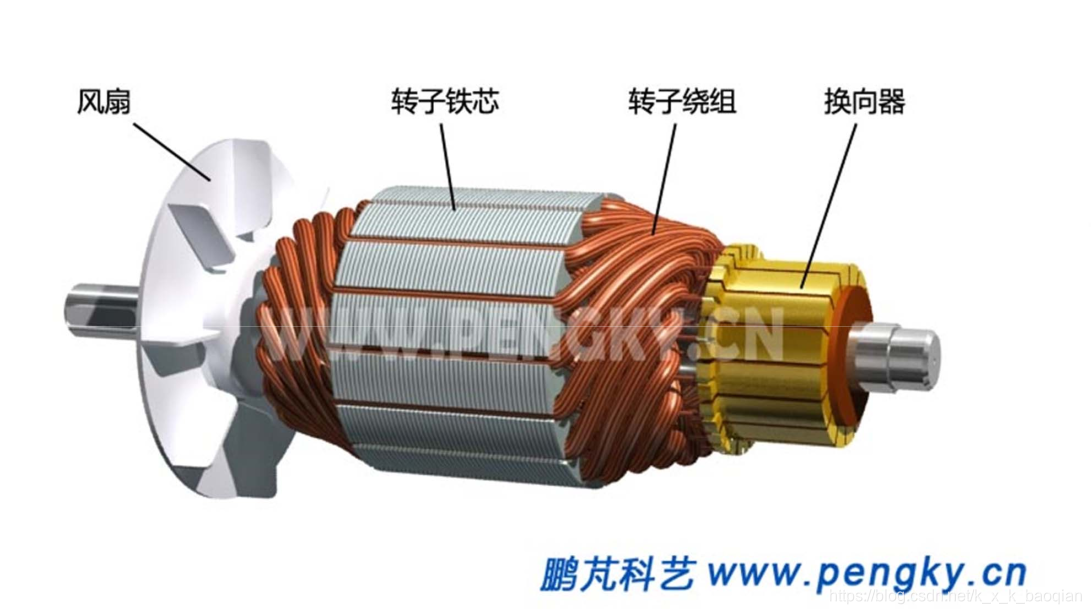
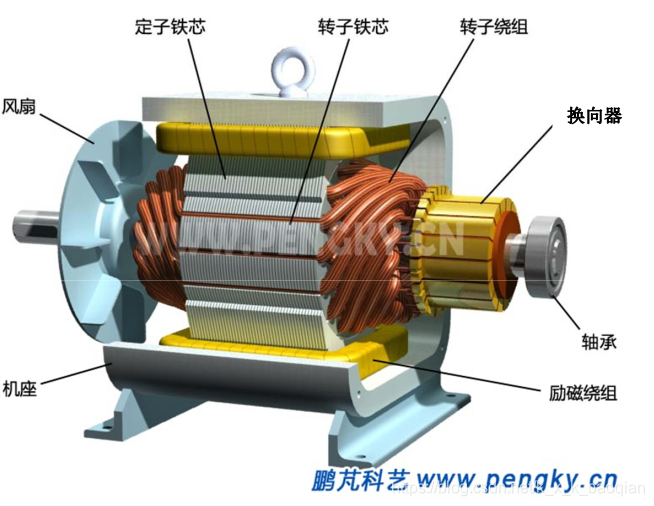
转子的结构:
1.电枢铁心:0.35 or 0.5 mm的 涂绝缘层的叠压硅钢片
作用:放绕组和给主磁通提供低阻磁路
2.电枢绕组:绝缘导线按规律连接,放在电枢铁心的表面槽内
作用:产生感应电动势和电磁转矩,是实现机电能量转化的枢纽
3.转向器:许多转向片(铜)组成,各片之间用云母绝缘,并且与绕组元件相连
作用:讲电刷上的直流变成绕组内部的交流
下面就是一个完整的转子
立体的看一看电机:
电机的表示:














 921
921











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









