






1.电磁力定律:直流电动机应用,产生力和力矩
电磁力:F = BIl
2.电磁感应定律:直流发电机应用:产生电势
电动势:e = Blv
3.原理阐述:
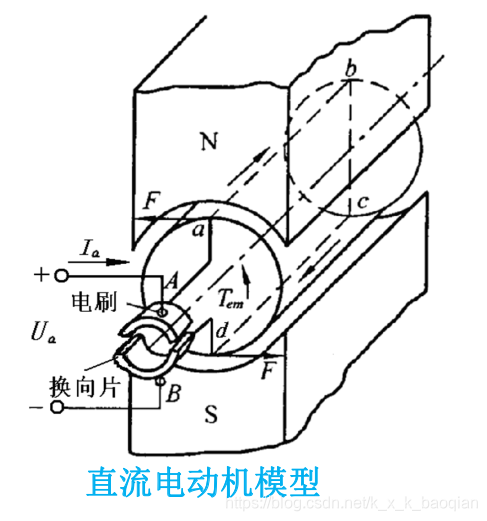
我们化简电动机,针对其中一砸线圈来说
1.我们知道磁场向下,左手定则,判断出靠近N的那根线圈受到向右的力,同时,下面的那根线
受到向左的力,线圈开始旋转
2.在线圈旋转到水平状态,到达电刷的缺口,所以线圈断电,不受力了
3.线圈依靠惯性,转过去后,重新接触到电刷,此时重复上面受力情况,所以线圈持续转动
绕组基础知识:
上面说的是单个线圈,真实情况显然是不止一个线圈
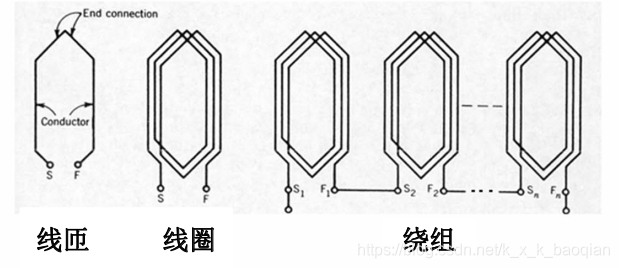
当多个线圈缠绕在一起,还是称为线圈,但也可以称为绕组元件
绕组元件显然不是绕组,所以多个绕组元件组成了绕组,下面是示意图
线匝 ----> 线圈 ----> 绕组
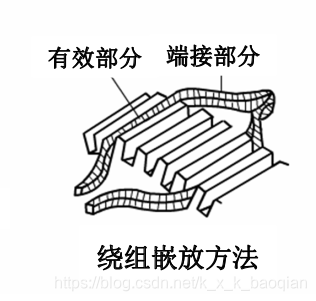
 观察发现一个线匝拥有两个平行的边,可以知道,这是卡在电枢铁心槽内的部分,同时也是切割磁感线的部分,即有效部分,剩下的是为了回路通畅
观察发现一个线匝拥有两个平行的边,可以知道,这是卡在电枢铁心槽内的部分,同时也是切割磁感线的部分,即有效部分,剩下的是为了回路通畅
单叠绕组
绕组方式众多,而且很复杂,我们这里只看一种简单的绕组方式:单叠绕组
所谓的单叠,就是一个槽内放两根线,呈上下的状态,任意一个线圈的两根线,注定一个上一个下,如下图
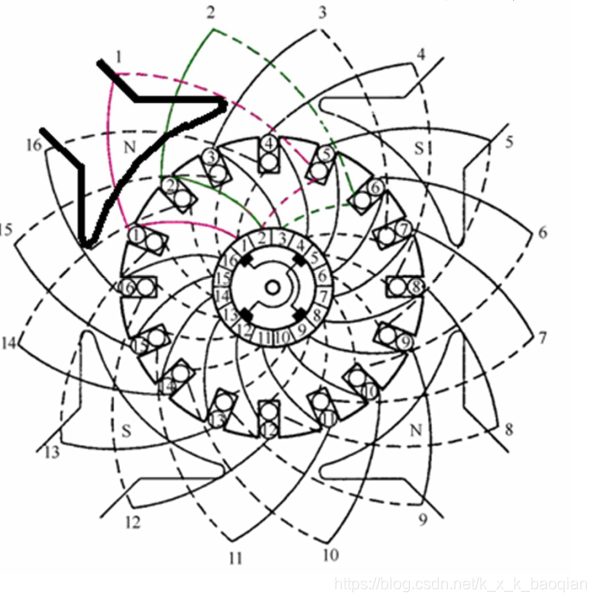
这是一个16轴的转子铁心,内有标号。
我们看看1号,他的第一根线在1号槽内,在上面,最终连接到1号换向片
另外一个在5号槽的下面,最终连接到2号换向片
相邻的2号两根线依旧和1号的线相邻















 5228
5228











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









