






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。当哲学课上老师问你什么是科学,什么是电的时候,不要觉得这些问题搞笑。哲学是科学之母,哲学就是追究终极问题,寻找那些不言自明只有小孩子会问的但是你却回答不出来的问题。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能让人胸中升起一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它居然给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
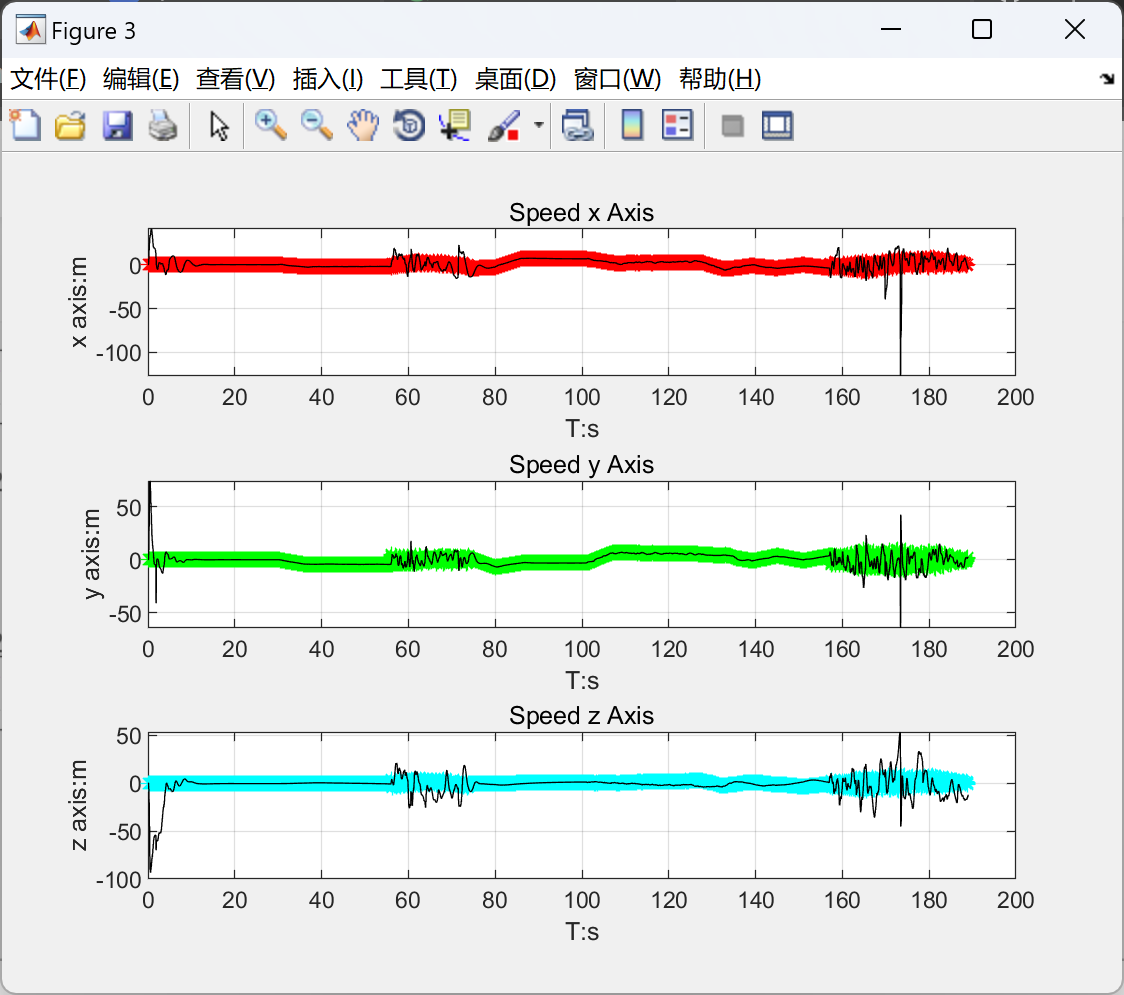
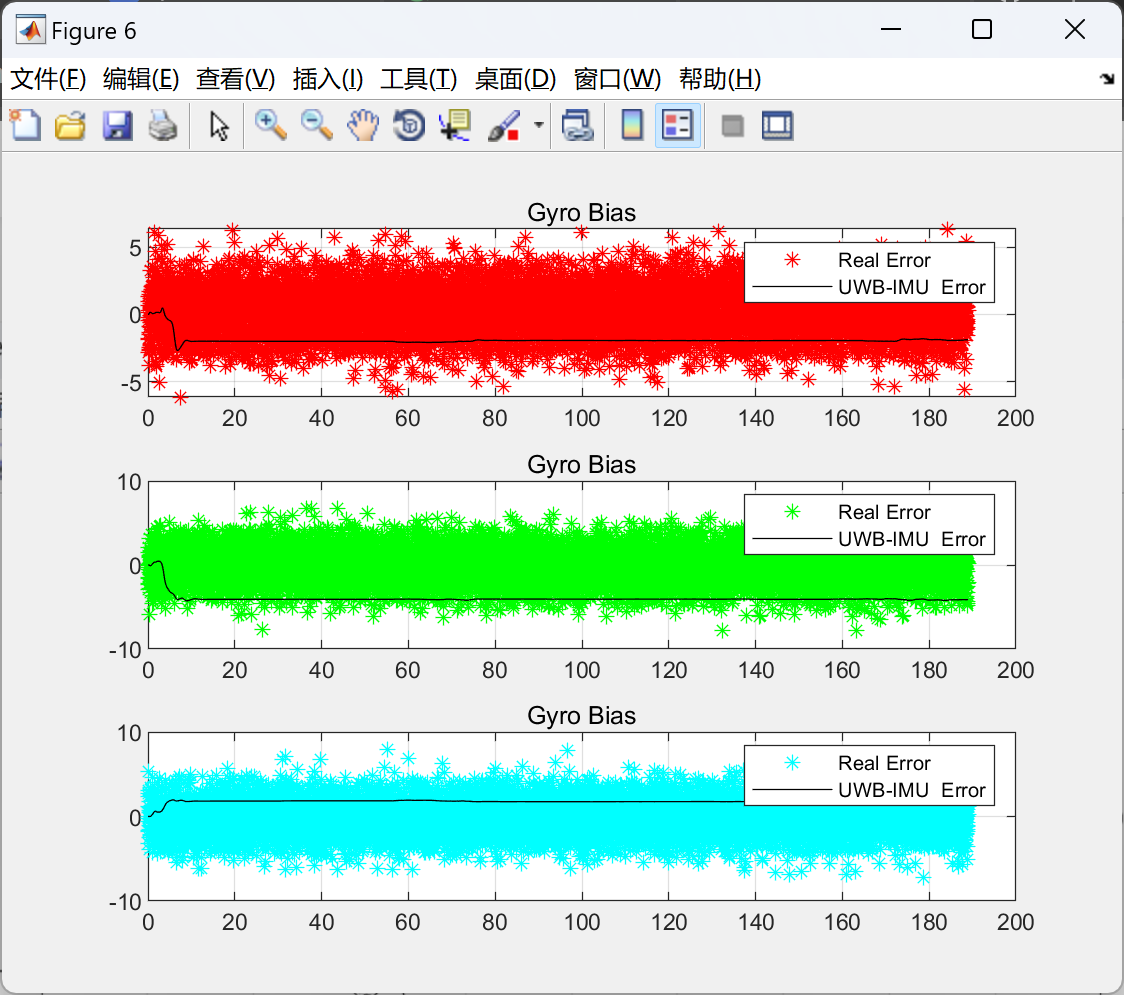
IMU的误差模型采用一阶马尔科夫噪声模型,将加速度计和陀螺仪噪声建立为高斯白噪声和Guass-Markov噪声。



结论:UWB-IMU组合定位导航效果,比之单一的导航,效果很明显,尤其是当UWB布局上无法解决垂直空间分辨率低时,融合算法效果明显。目前使用实际数据,效果亦能控制在0.5m以内,定位精度还可以提升,已证明该滤波方法可靠有效。
📚2 运行结果







部分代码:
%%航迹发生器
atti = zeros(3,1); %滚转、俯仰、偏航(单位:度)
atti_rate = zeros(3,1); %滚转角速率、俯仰角速率、偏航角速率(单位:度/秒)
veloB = zeros(3,1); %飞机运动速度--X右翼、Y机头、Z天向(单位:米/秒)
acceB = zeros(3,1); %飞机运动加速度--X右翼、Y机头、Z天向(单位:米/秒/秒)
posi = zeros(3,1); %航迹发生器初始位置经度、纬度、高度(单位:度、度、米)
posi = [26;70;-19];
atti(1,1) = 0; %
atti(2,1) = 0; %
atti(3,1) = 90; %初始航向角(单位:度)
%%IMU输出
Wibb = zeros(3,1); %机体系陀螺仪输出(单位:度/秒)
Fb = zeros(3,1); %机体系加速度计输出(单位:米/秒/秒)
Gyro_fix = zeros(3,1); %机体系陀螺仪固定误差输出(单位:弧度/秒)
Acc_fix = zeros(3,1); %机体系加速度计固定误差输出(单位:米/秒/秒)
Gyro_b = zeros(3,1); %陀螺随机常数(弧度/秒)
Gyro_r = zeros(3,1); %陀螺一阶马尔可夫过程(弧度/秒)
Gyro_wg = zeros(3,1); %陀螺白噪声(弧度/秒)
Acc_r = zeros(3,1); %加速度一阶马尔可夫过程(米/秒)
%%UWB仿真输出
posiG = zeros(3,1); %UWB输出的飞行器位置测距值
%%捷联惯导仿真
attiN = zeros(3,1); %飞行器初始姿态
veloN = zeros(3,1); %飞行器初始速度(相对于导航系)
posiN = zeros(3,1); %飞行器初始位置
WnbbA_old = zeros(3,1); %角速度积分输出(单位:弧度)
posiN = posi;
attiN = atti;
%%KALMAN滤波输出
T_D = 1; %离散周期
T_M = 0; %滤波量测产生时间(秒)
Xc = zeros(18,1); %综合模型状态量
PK = zeros(18,18); %协方差阵
Xerr = zeros(1,18); %状态估计量的误差
kflag = 0; %GPS信号有效标志位(1-有效)
Acc_modi = zeros(3,1); %加速度计误差修正值
Gyro_modi = zeros(3,1); %陀螺仪误差修正值
%%初始对准
kc = 0;
tmp_Fb = zeros(3,1);
tmp_Wibb = zeros(3,1);
t_alig = 0;
old_veloB = veloB;
old_atti = atti;
deg_rad = pi/180;
TraceData = [];
IMUData =[];
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]胡文龙,周宇飞,宋全军,等.基于UWB和IMU信息融合的室内定位算法研究[J].制造业自动化, 2023, 45(2):193-197.
[2]张松浩,崔敏,张鹏.基于UWB和IMU紧组合的室内定位导航算法研究[J].科学技术创新, 2023(13):17-20.
[3]王嘉欣,李桂林,曹海东.UWB和IMU技术融合的室内定位算法研究[J].单片机与嵌入式系统应用, 2020, 20(8):3.

















 556
556

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









