






UWB (Ultra-Wideband) 和 IMU (Inertial Measurement Unit) 融合是一种常见的传感器融合技术,用于定位和导航系统中。这种融合可以结合 UWB 的高精度定位能力和 IMU 的实时动态信息,提供更精确和可靠的定位解决方案。下面是一些关于如何进行 UWB 和 IMU 融合的一般步骤:
1. 数据采集:首先,需要采集 UWB 和 IMU 传感器的数据。这些数据包括 UWB 的位置测量和 IMU 的加速度计和陀螺仪输出。
2. 传感器校准:对 UWB 和 IMU 传感器进行校准以确保其精度和准确性。对于 IMU,校准通常涉及零偏、尺度因子和轴间的误差校准。对于 UWB,可能需要进行传输延迟和传输功率的校准。
3. 传感器融合算法:选择合适的融合算法,常见的包括扩展卡尔曼滤波器(EKF)、粒子滤波器、累积误差校正(AEC)等。这些算法可以将 UWB 和 IMU 的测量数据结合起来,估计出更准确的位置和姿态信息。
4. 状态估计:使用选定的融合算法对 UWB 和 IMU 的数据进行处理,以估计系统的状态,包括位置、速度和方向。
需要注意的是,UWB 和 IMU 融合的具体实现取决于应用场景、传感器的特性以及系统需求。在实际应用中,可能需要进行一些定制化的调整和优化才能达到最佳的性能。
本文利用UWB当作观测,IMU当作控制输入做的模拟仿真,并利用画出状态MSE,部分代码如下。
%% CMF-EKF
Xekf(:,1)=X(:,1);
P(:,:,1)=eye(4);
for i=2:bushu
Xjian(:,i)=fai*Xekf(:,i-1)+B*u(:,i);
P0(:,:,i)=fai*P(:,:,i-1)*fai'+gama*Q*gama';
x=Xjian(1,i);y=Xjian(3,i);
h(:,i)=[sqrtm((x-x1)^2+(y-y1)^2);
sqrtm((x-x2)^2+(y-y2)^2);
sqrtm((x-x3)^2+(y-y3)^2)];
H(:,:,i)=[(2*x - 2*x1)/(2*((x - x1)^2 + (y - y1)^2)^(1/2)), 0, (2*y - 2*y1)/(2*((x - x1)^2 + (y - y1)^2)^(1/2)), 0;
(2*x - 2*x2)/(2*((x - x2)^2 + (y - y2)^2)^(1/2)), 0, (2*y - 2*y2)/(2*((x - x2)^2 + (y - y2)^2)^(1/2)), 0;
(2*x - 2*x3)/(2*((x - x3)^2 + (y - y3)^2)^(1/2)), 0, (2*y - 2*y3)/(2*((x - x3)^2 + (y - y3)^2)^(1/2)), 0];
K(:,:,i)=P0(:,:,i)*H(:,:,i)'*pinv(H(:,:,i)*P0(:,:,i)*H(:,:,i)'+R);
Xekf(:,i)=Xjian(:,i)+K(:,:,i)*(Z(:,i)-h(:,i));
P(:,:,i)=(eye(4)-K(:,:,i)*H(:,:,i))*P0(:,:,i);
end
图1 二维平面跟踪图
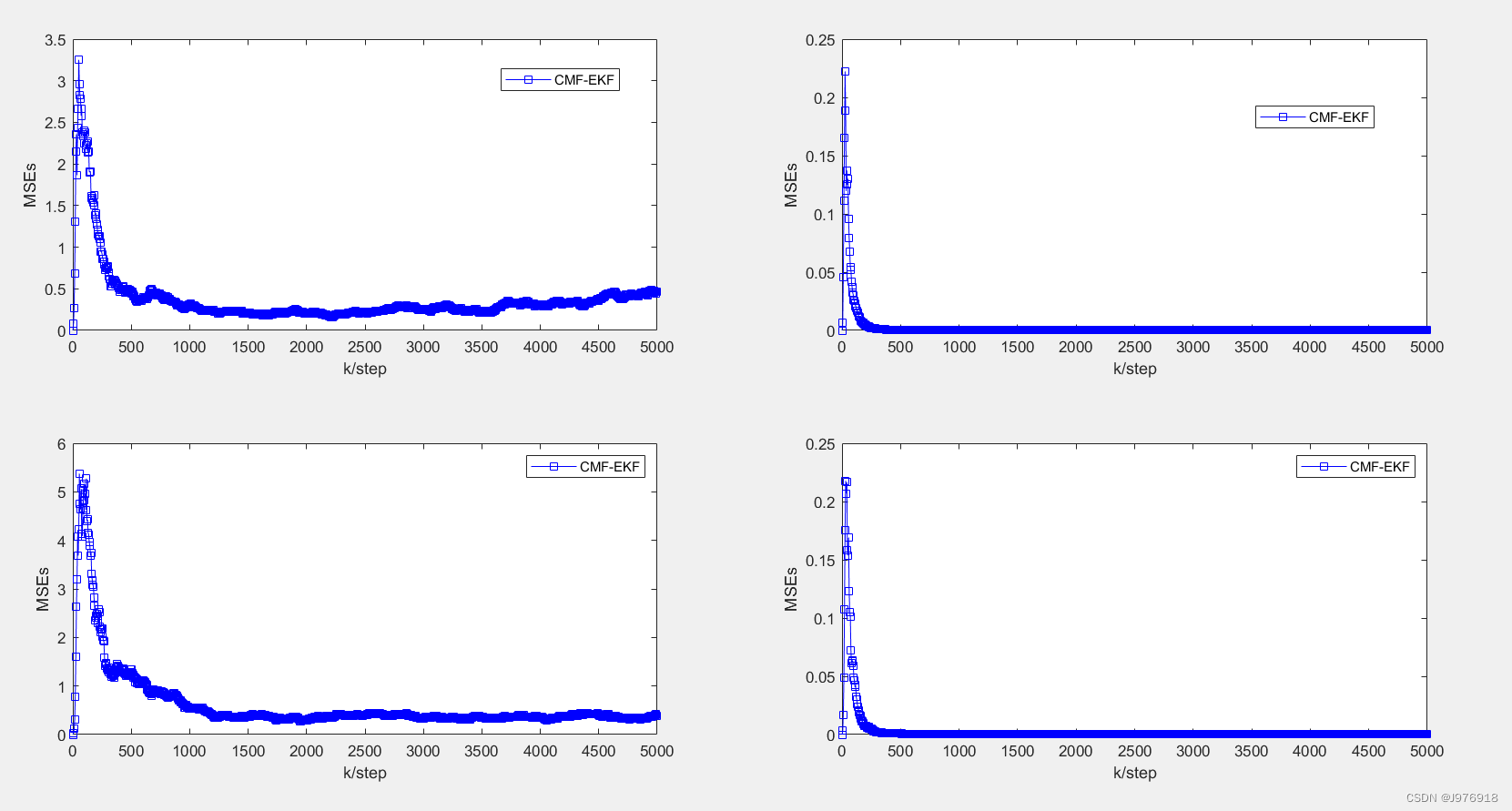
图二 4个状态MSE















 1226
1226











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









