







前前言(2022/11/16更新)
自定义数据格式是无法通过ros2bag play 获取的,因此强烈建议用ROS1打开bag文件!!不要再尝试用ROS2了!!!(2023/4/6 保留意见,故字体改为白色)
前言
本文适用于:大部分操作都在ros2上运行的情形(因为后续安装ros1之后涉及到环境配置)。
解决2个关键报错(参考https://github.com/ros2/rosbag2/issues/94):
同时安装ros2和ros1之后:1. 命令行输入“ros2 bag **” 后报错:Failed to load entry point 'play':
/opt/ros/galactic/lib/librosbag2_storage.so: undefined symbol: _ZNK12class_loader11ClassLoader15isLibraryLoadedEv

2. 命令行输入“ros2 bag **” 后报错:Failed to load library /opt/ros/galactic/lib/librosbag2_bag_v2_plugins.so.... Error string: Could not load library dlopen error: libroscpp_serialization.so: cannot open shared object file: No such file or directory

操作步骤:
- 在已安装ros2的环境中安装ros1
- 安装rosbag_v2相关依赖和插件
- 环境配置(关键)
- 验证
- ros2 bag 命令用法
一、 在已安装ros2的环境中安装ros1
可参考该文“1. ROS1安装”部分(我安装的是ros1-noetic版本) → Ubuntu20.04 ROS1和ROS2同时安装及使用 - 古月居 (guyuehome.com)
二、 安装rosbag_v2相关依赖和插件
# 安装catkin_tools(https://catkin-tools.readthedocs.io/en/latest/installing.html)
$ sudo sh \
-c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -sc` main" \
> /etc/apt/sources.list.d/ros-latest.list'
$ wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
$ sudo apt-get update
$ sudo apt-get install python3-catkin-tools
# 安装依赖与插件(https://www.ncnynl.com/archives/202209/5469.html)
$ sudo apt update
$ sudo apt install -y libroscpp-serialization0d \
ros-galactic-nmea-msgs \
ros-noetic-nmea-msgs
$ sudo apt install -y ros-galactic-rosbag2-bag-v2-plugins \
ros-galactic-rosbag2-storage \
ros-galactic-rosbag2-storage-default-plugins \
ros-galactic-ros2bag ros-galactic-rosbag2-transport 三、环境配置(关键)
在 .bashrc 文件末尾添加如下两行(将galactic换为你的ros2版本名)
source /opt/ros/galactic/setup.bash
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/opt/ros/noetic/lib
四、验证
打开.bag文件方法:
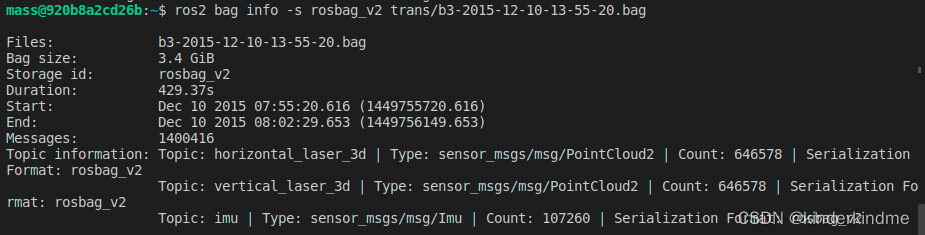
# 查看.bag信息,如上图,包含topic等信息
$ ros2 bag info -s rosbag_v2 your_bag_file.bag
# 回放.bag
$ ros2 bag play -s rosbag_v2 your_bag_file.bag相关其他信息/资料可参考:ROS1与ROS2的bag包互换(包含自定义消息) - 古月居 (guyuehome.com)















 1944
1944











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









