






四旋翼ADRC控制器仿真,已调好
已经生成C语言了,要放到单片机运行的伙伴可以拿去研究。
ID:6425709010654492
苑2016

四旋翼ADRC控制器是一种高级的飞行器控制技术,其仿真和C语言实现已经在实验环境中验证并调试完成。这项技术的研究和实现对于飞行器的稳定性和控制精度具有重大意义。本文将从仿真模型的建立、控制器设计和实现等方面进行详细讨论,以帮助读者更好地理解和运用该控制器。
首先,我们简要介绍四旋翼ADRC控制器的基本原理和背景。四旋翼是一种无人机类型,由四个电动机驱动旋转的螺旋桨提供升力,通过调节电机转速实现飞行器的姿态控制。ADRC(Active Disturbance Rejection Control)是一种先进的控制策略,通过对系统中各种干扰和未知因素进行在线估计和补偿,提高系统的鲁棒性和稳定性。
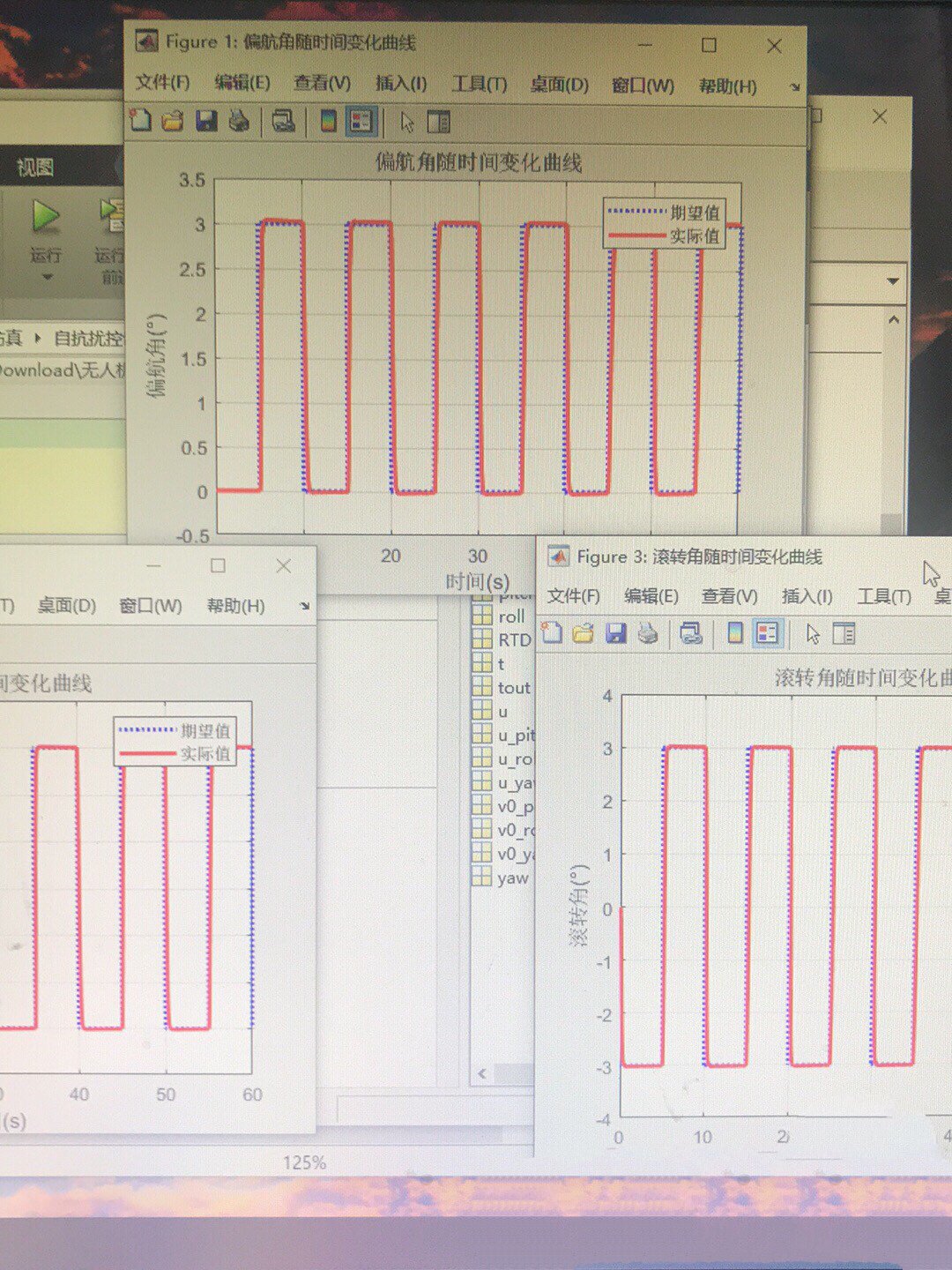
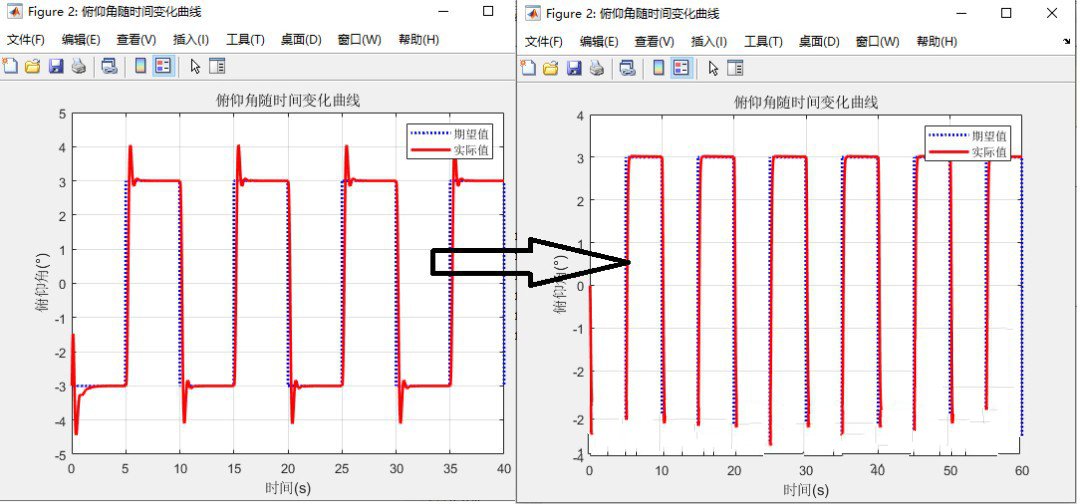
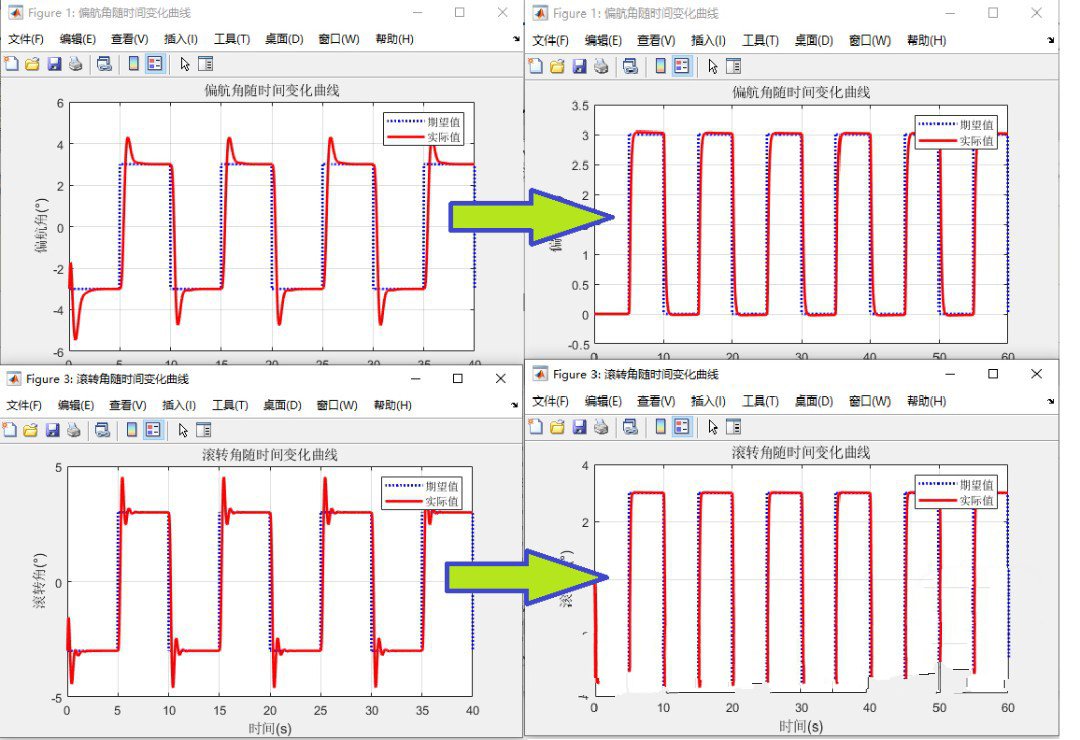
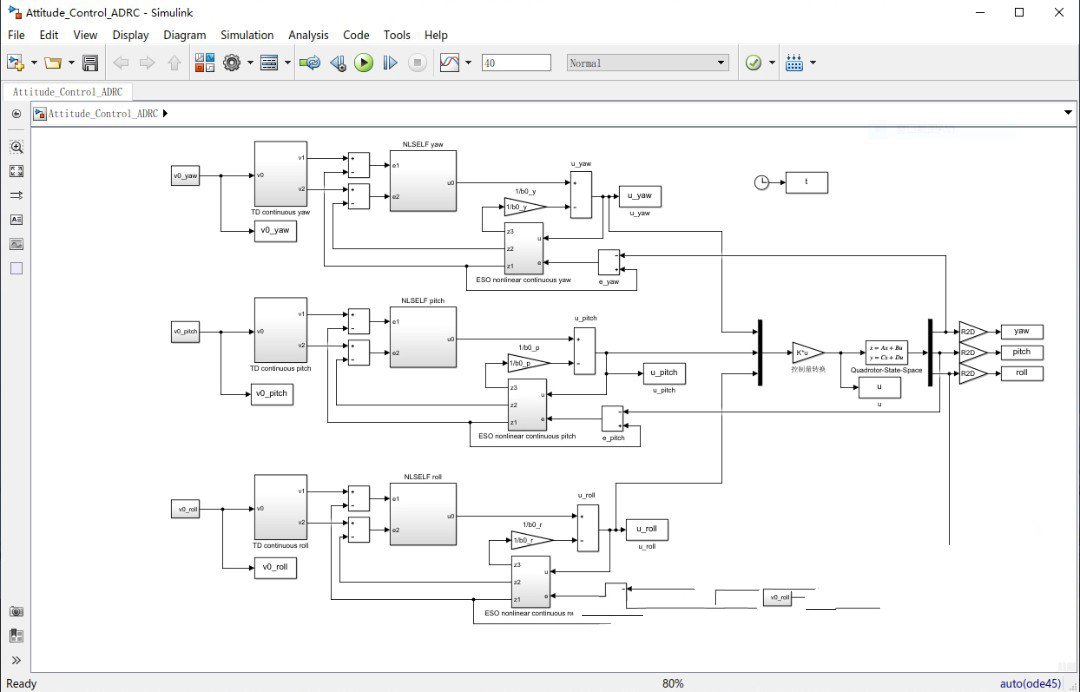
接下来,我们详细介绍四旋翼ADRC控制器的仿真模型建立过程。仿真模型的建立是研究和验证控制器性能的重要环节。我们首先对四旋翼的飞行动力学进行建模,考虑到飞行器的惯性、气动力和控制效能等因素。然后,基于ADRC控制策略,建立控制器的数学模型。通过对模型进行仿真,可以评估控制器在不同工况下的性能表现。
在控制器设计方面,我们详细介绍了ADRC控制策略的核心思想和关键步骤。首先,我们将系统的模型误差定义为系统的“扰动”,并将扰动估计问题转化为状态观测问题。然后,我们使用扩展状态观测器(ESO)对系统的扰动进行在线估计。接着,我们设计了自适应超调补偿器(ADRC)来实现对扰动的补偿。最后,我们通过调整ADRC控制器的参数,使得系统的控制性能达到预期。
经过仿真和参数调整,我们已经成功地将四旋翼ADRC控制器生成了C语言代码,可以直接运行在嵌入式系统上。对于对飞行器控制感兴趣的研究者和工程师来说,这是一个重要的里程碑。通过将控制器部署到嵌入式系统中,我们可以实现飞行器的实时控制和稳定飞行。
总之,本文以四旋翼ADRC控制器为主题,从仿真模型的建立、控制器设计和实现等方面进行了详细讨论。通过对该控制器的研究和实现,我们为飞行器控制技术的发展做出了重要的贡献。希望本文能够帮助读者更好地理解和应用该控制器,推动飞行器技术的不断发展和创新。
【相关代码,程序地址】:http://fansik.cn/709010654492.html
















 787
787











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









