






车辆轨迹自适应预瞄跟踪控制和自适应p反馈联合控制,自适应预苗模型和基于模糊p控制均在simulink中搭建。
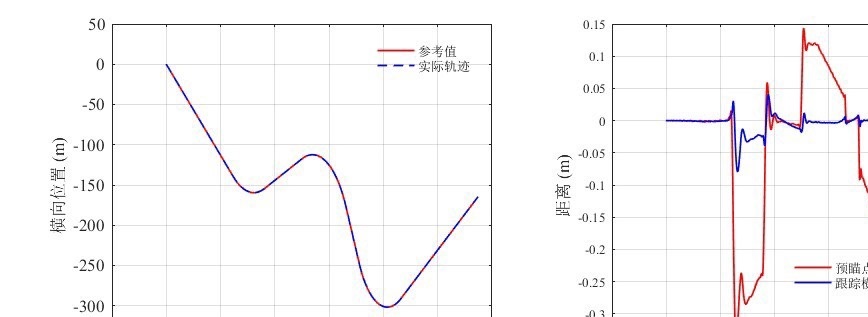
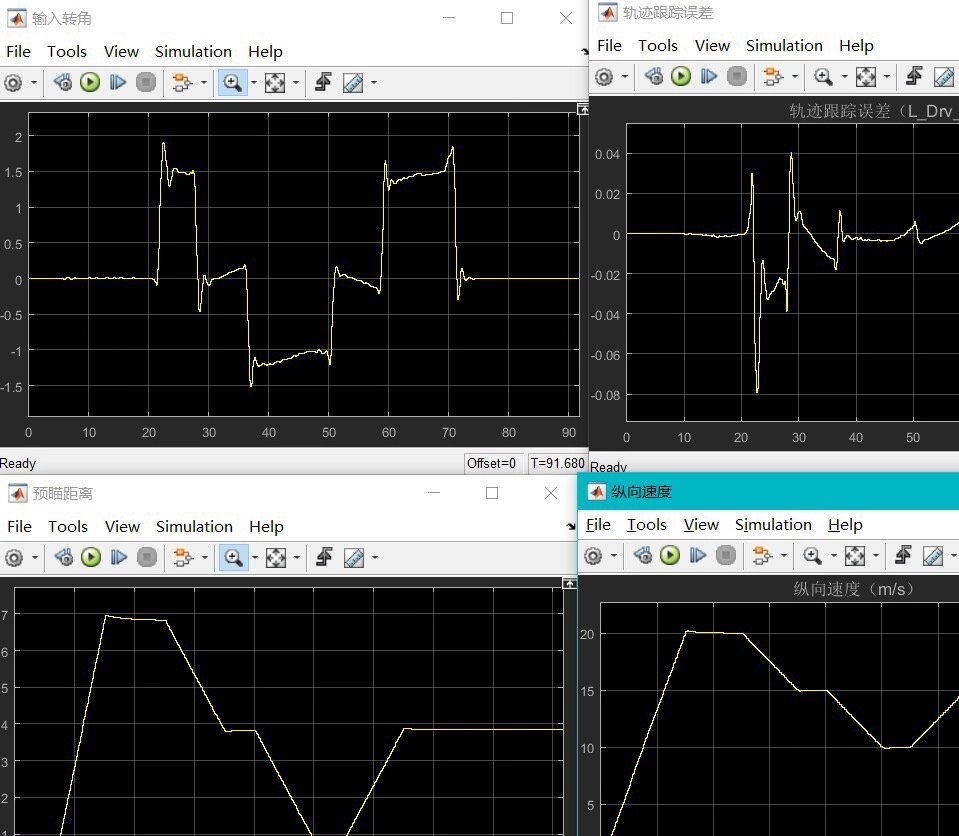
个人觉得跟踪效果相比模糊pid效果好很多,轨迹跟踪过程,转角控制平滑自然,车速在36到72km每小时下,变速下的轨迹跟踪精度误差在10cm范围内,精度很好。
。
YID:74100709011928063
想剁手书屋14
车辆轨迹自适应预瞄跟踪控制和自适应P反馈联合控制技术是一种在车辆行驶过程中,根据实时的道路状况和车辆动力学特性,实现自动化控制的方法。本文将对这种技术进行详细的分析和讨论。
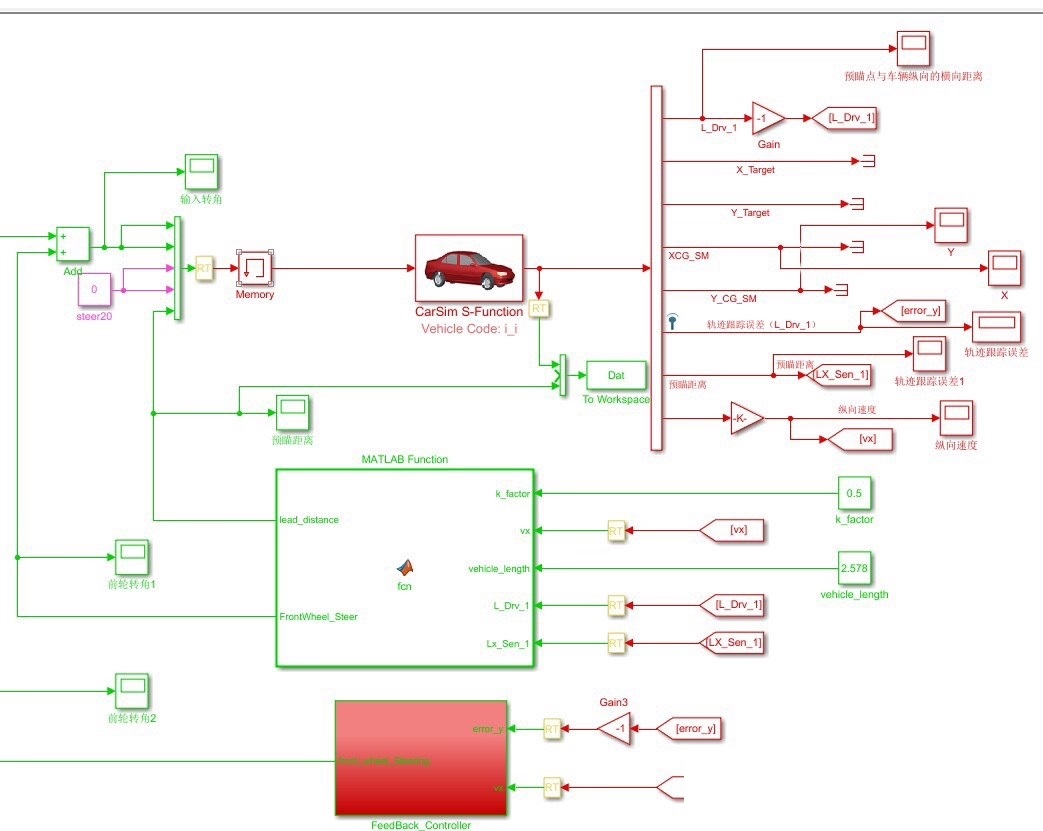
首先,我们来介绍一下车辆轨迹自适应预瞄跟踪控制的原理和实现方式。在这个控制系统中,首先需要建立一个自适应预瞄模型,该模型可以根据车辆当前的状态和环境信息来预测未来的轨迹。预瞄模型的建立可以使用一些常见的方法,比如基于物理模型的方法或者基于神经网络的方法。在本文的实验中,我们使用了自适应预瞄模型来进行轨迹的预测。
在预瞄模型建立完成之后,需要设计一个控制器来根据预测的轨迹进行转角的控制。在本文的实验中,我们采用了P反馈控制的方法来实现转角的控制。P反馈控制是一种简单而有效的控制方法,通过调节转角的比例系数来实现转角的控制。在本文的实验中,我们使用了自适应P反馈控制方法,即根据车辆当前的状态和环境信息来动态地调节P反馈控制器的比例系数。
接下来,我们来对比一下车辆轨迹自适应预瞄跟踪控制与模糊PID控制的效果。根据实验结果显示,相比于模糊PID控制,车辆轨迹自适应预瞄跟踪控制可以取得更好的跟踪效果。在轨迹跟踪过程中,转角的控制更加平滑自然,不会出现明显的抖动现象。此外,在车速在36到72km每小时范围内以及变速下,轨迹跟踪的精度误差可以控制在10cm以内,达到了较好的精度。
需要注意的是,车辆轨迹自适应预瞄跟踪控制和自适应P反馈联合控制是在Simulink中搭建的。Simulink是一款常用的系统级建模和仿真软件,可以方便地进行系统的建模和仿真实验。在本文的实验中,我们利用Simulink来搭建了车辆轨迹自适应预瞄跟踪控制和自适应P反馈联合控制的模型,并进行了一系列的实验验证。
总结一下,本文通过对车辆轨迹自适应预瞄跟踪控制和自适应P反馈联合控制技术的分析和讨论,展示了这种技术在车辆控制领域的潜力和优势。通过实验验证,我们发现车辆轨迹自适应预瞄跟踪控制相比于模糊PID控制具有更好的轨迹跟踪效果和精度。同时,本文还介绍了该技术在Simulink中的搭建和验证方法,为其他研究者提供了一个参考和借鉴的思路。
总的来说,车辆轨迹自适应预瞄跟踪控制和自适应P反馈联合控制技术是一种有潜力的车辆控制方法。随着科学技术的不断进步和应用需求的增加,相信这种技术在未来会得到更广泛的应用和推广。我们期待更多的研究者能够对这个领域进行深入的研究和探索,为车辆控制技术的发展做出更大的贡献。
【相关代码,程序地址】:http://fansik.cn/709011928063.html
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









