






基于二次规划(QP)的路径规划和速度规划
matlab代码实现 + 详细文档
picewise jerk path
picewise jerk speed
更新: c++版本已完成,qt可视化。
ID:4885709008148922
autorobot
在机器人运动控制中,路径规划和速度规划是两个非常关键的问题。路径规划决定了机器人在空间中的运动轨迹,而速度规划则确定了机器人在运动过程中的速度变化。本文将介绍一种基于二次规划(QP)的路径规划和速度规划方法,并提供了MATLAB代码实现和详细文档,同时还提供了C++版本并结合Qt实现的可视化工具。
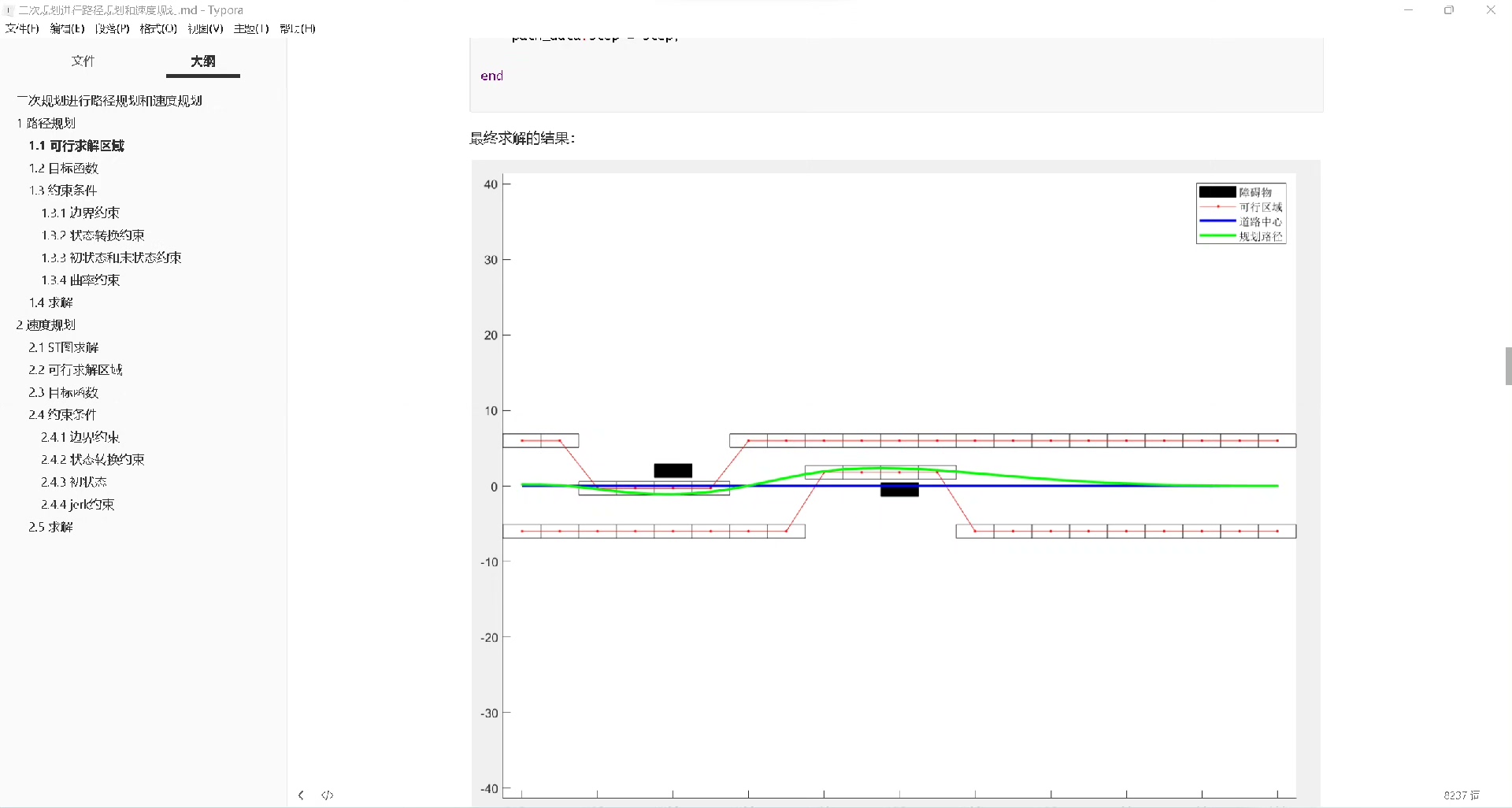
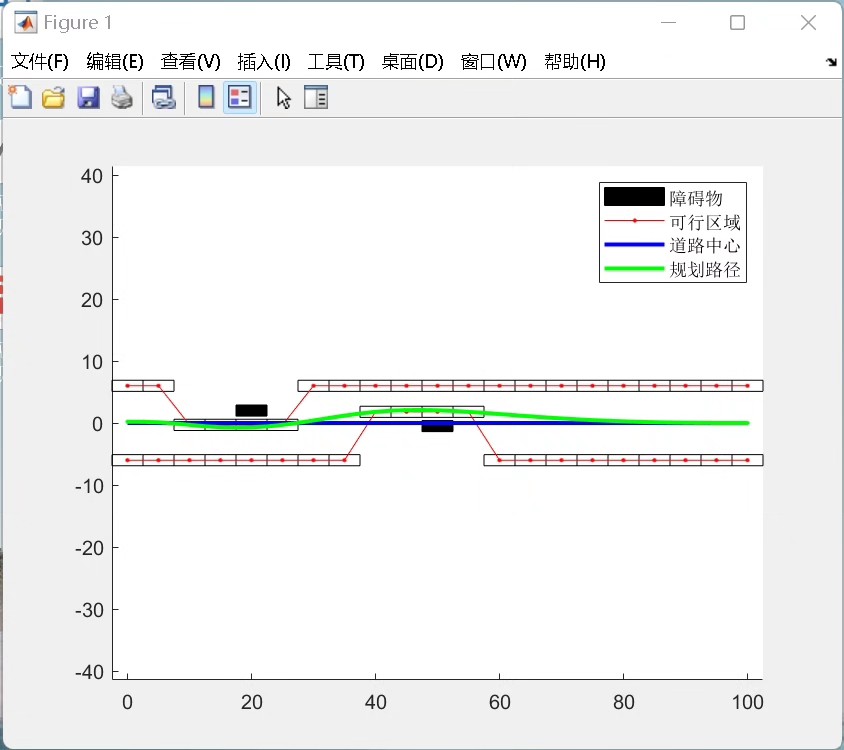
在路径规划中,我们常常希望机器人能够按照一定的顺序通过一系列的点,以达到目标点的最佳路径。由于机器人的运动受到各种约束条件的限制,路径规划问题变得复杂而困难。二次规划是一种常用的数学方法,可以有效地解决路径规划问题。它通过优化目标函数,并同时满足一系列的等式和不等式约束条件,得到最优的路径。
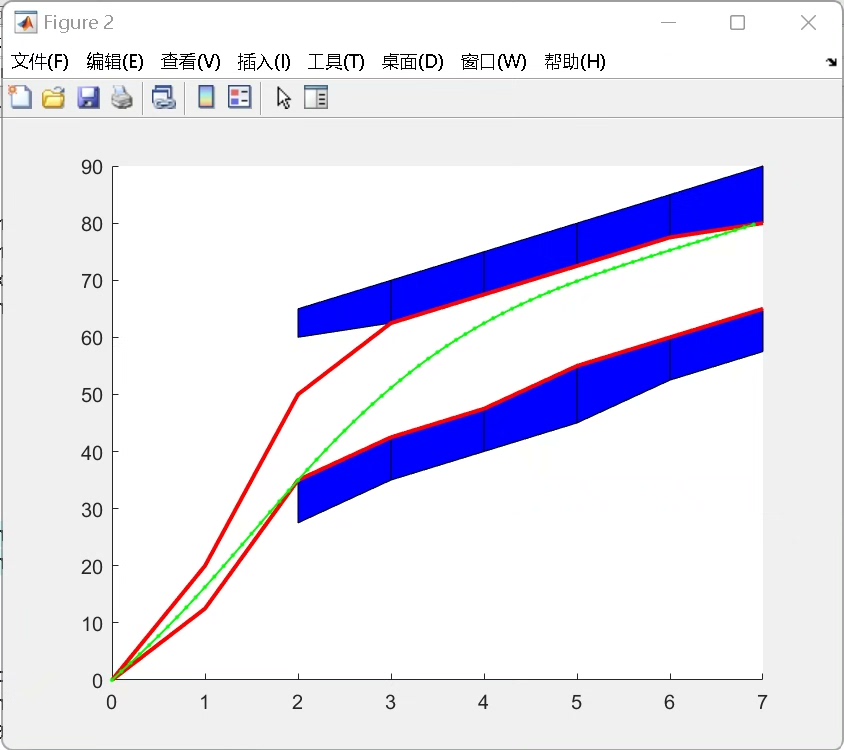
在速度规划中,我们希望机器人在运动过程中能够保持平滑的速度变化。传统的速度规划方法往往只考虑了机器人的加速度或者速度的变化,而忽略了机器人加速度变化的连续性。因此,速度规划结果往往呈现出速度变化突然的情况,导致机器人在运动过程中不稳定。为了解决这个问题,引入了“picewise jerk”(即分段加速度变化)的概念。通过将加速度的变化分段,在每个片段内保持加速度变化连续,从而实现了平滑的速度规划。
基于二次规划的路径规划和速度规划方法的具体实现如下。首先,将机器人的路径分割成若干个小段,并假设每段路径的加速度是恒定的。然后,通过QP问题的优化求解,得到每段路径的加速度变化量。接下来,根据每段路径的加速度变化量,计算出每段路径的速度规划。最后,根据速度规划得到的路径,进行运动控制,实现机器人的运动。
为了实现这个方法,我们提供了MATLAB代码和详细文档,帮助用户理解和应用该方法。用户可以根据自己的需求,调整和优化代码中的参数,从而得到最佳的路径规划和速度规划结果。
此外,为了方便C++开发者的使用,我们还提供了C++版本的代码,并结合Qt实现了可视化工具。通过该工具,用户可以更直观地观察机器人的运动轨迹和速度变化,并进行实时调试和优化。
综上所述,基于二次规划的路径规划和速度规划方法是一种有效的机器人运动控制方法。通过该方法,可以实现机器人在给定约束条件下的最优路径规划和平滑的速度规划。MATLAB代码和详细文档的提供,以及C++版本的代码和可视化工具的实现,使得该方法更易于理解和应用。希望本文能为读者提供一种新的思路和方法,对机器人运动控制领域的研究和实践产生积极的影响。
【相关代码,程序地址】:http://fansik.cn/709008148922.html



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









