






 本文详细介绍了在Simulink中导入ADAMS二自由度机械臂模型的步骤,包括设置ADAMS插件、生成Simulink工程、设置MSCSoftware等,使读者能够快速掌握联合仿真的技巧。
本文详细介绍了在Simulink中导入ADAMS二自由度机械臂模型的步骤,包括设置ADAMS插件、生成Simulink工程、设置MSCSoftware等,使读者能够快速掌握联合仿真的技巧。
(博主做控制非机械出身,却有着要做机械的命,只能硬着头皮上了。)
本章主要内容:
如何在Simulink中导入ADAMS二自由度机械臂模型
1、设置ADAMS插件。
点击工具栏中的插件,单击Adams/Control,选择第一个的机械系统导出,在第一栏填写名称以及文件前缀,填写输入变量和输出变量同样可以通过右击,然后选取ADAMS变量,推测:
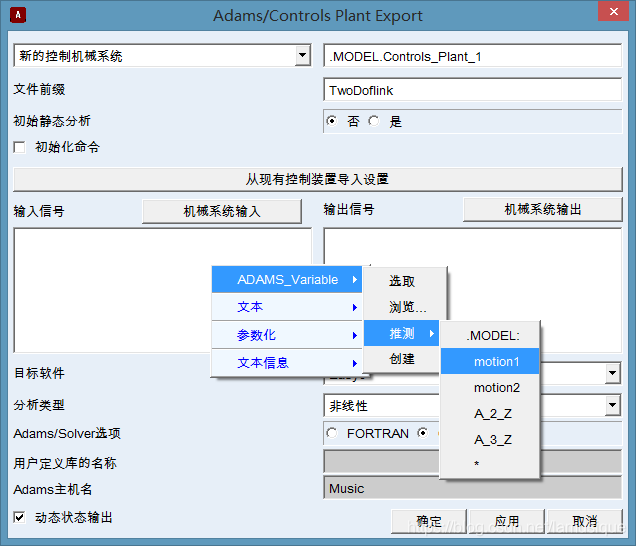
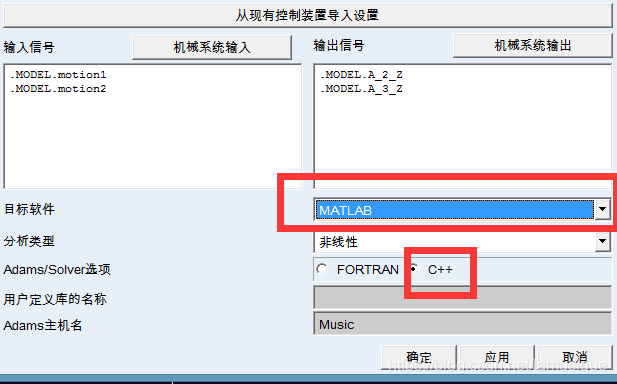
目标软件填写MATLAB,Adams/Sovel选项选择C++,点击确认后在该工程的文件目录下会生成以文件前缀为开头的几个文件名,这样由ADAMS生成Simulink的工程就完成一半了。
2、打开matlab (注意ADAMS32位,则MATLAB就得是32位)到文件的同一路径,定位到ADAMS的工作目录
输入对应文件前缀的名称则有(其实就是运行TwoDoflink.m文件啦)
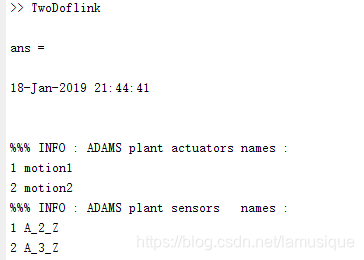
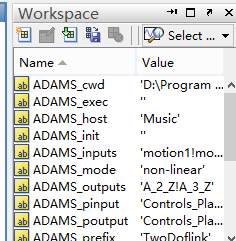
在里面可以看到输入输出量,工作区会看到一些ADAMS的参数量
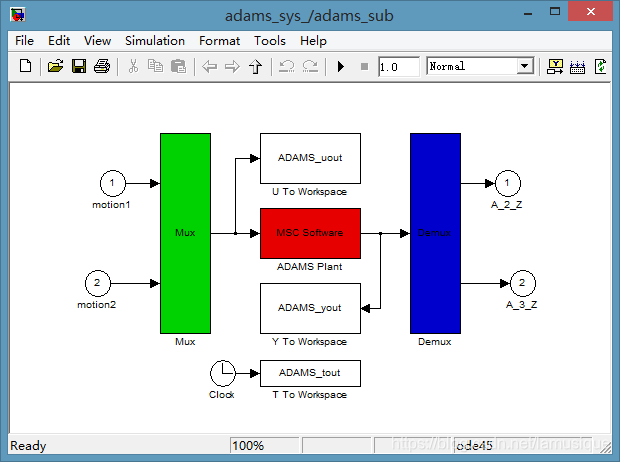
3、输入adams_sys,会启动simulink,并生成一个Model
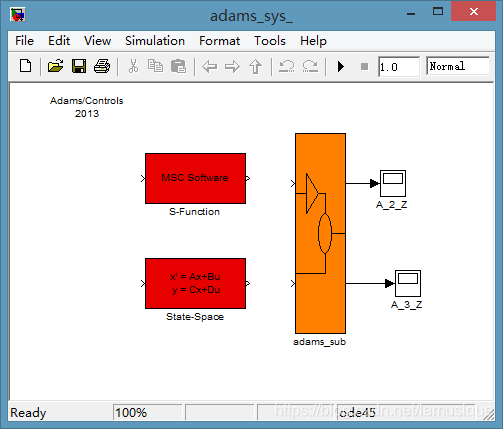
其中有两个红色的模块分别为S-Funtion和State-Space,用法和simulink是一样的,这里为了简单演示,通过一个Ramp模块输入驱动变量,即是通过ADAMS中的输入状态变量驱动旋转驱动
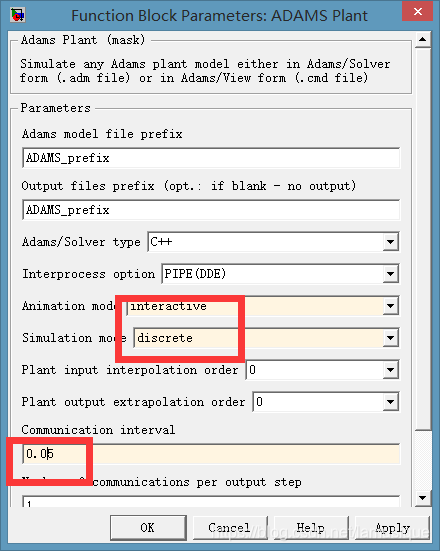
4、点击adams_sub,设置MSC Software
有两种方法设置:一种是simulink运行,adams不运行,只是导入了模型。另一种是simulink运行,adams也同时运行,这时候会弹出adams界面,观察杆体运动动画。
第一种:(本地的模拟)
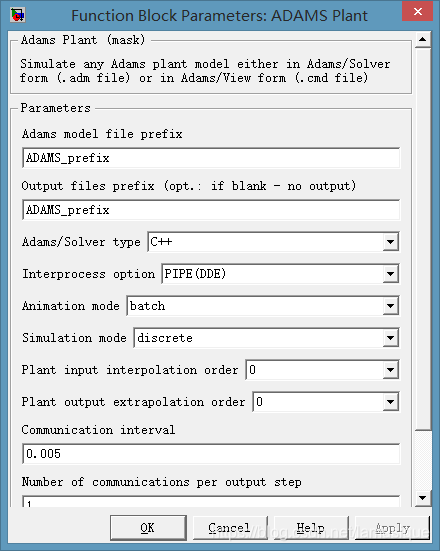
默认是使用本地的模拟。Adams/Sover type选项选择C++;Interprocess option选择PIPE,选择TCP话可以远程调试;Animation mode选择batch是在Simulink中调试,不调用ADAMS;Simulation mode选择discrete,若只选择simulink调试,后面选项不用改。
第二种:(使用ADAMS同步查看)
Adams/Sover type选项选择C++;Interprocess option选择PIPE,选择TCP话可以远程调试,Animation mode选择interactive是调用系统中的ADAMS进行联合仿真,Simulation mode选择discrete(离散),进行simulink和ADAMS的联合仿真;若是选择联合ADAMS仿真这要将下面的步长设置的和ADAMS中相同,交互步长设置为0.05。
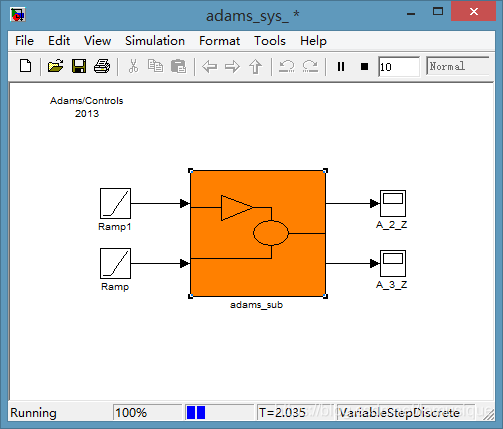
自动弹出ADAMS窗口,观察到两连杆运动。

















 1413
1413

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









