






 本文详细描述了如何在Adams中操作现成的汽车模型,导出控制,设置输入信号,生成仿真文件,并与MATLAB集成,以进行车辆参数分析和仿真过程。
本文详细描述了如何在Adams中操作现成的汽车模型,导出控制,设置输入信号,生成仿真文件,并与MATLAB集成,以进行车辆参数分析和仿真过程。
1.打开Adams装配体里面现成的汽车模型
以acar_shared里面的汽车为例
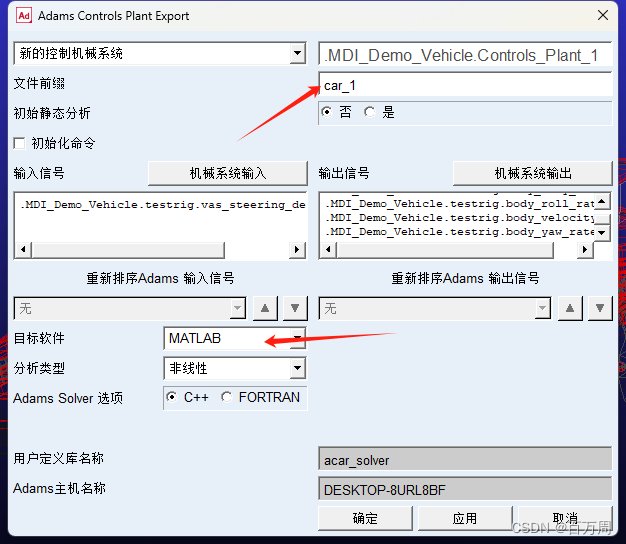
3.点击controls——机械系统导出

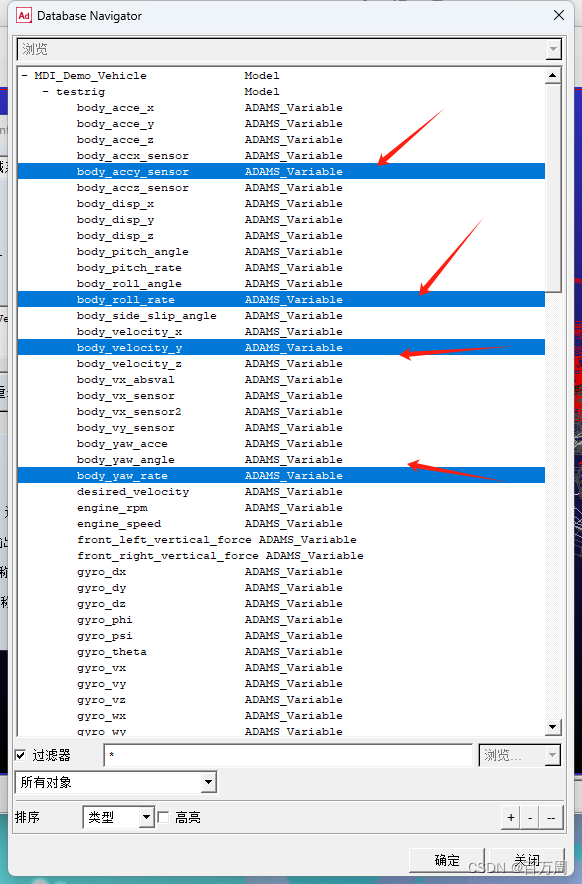
4.左侧输入信号右键ADAMS变量——推测——最下方省略号
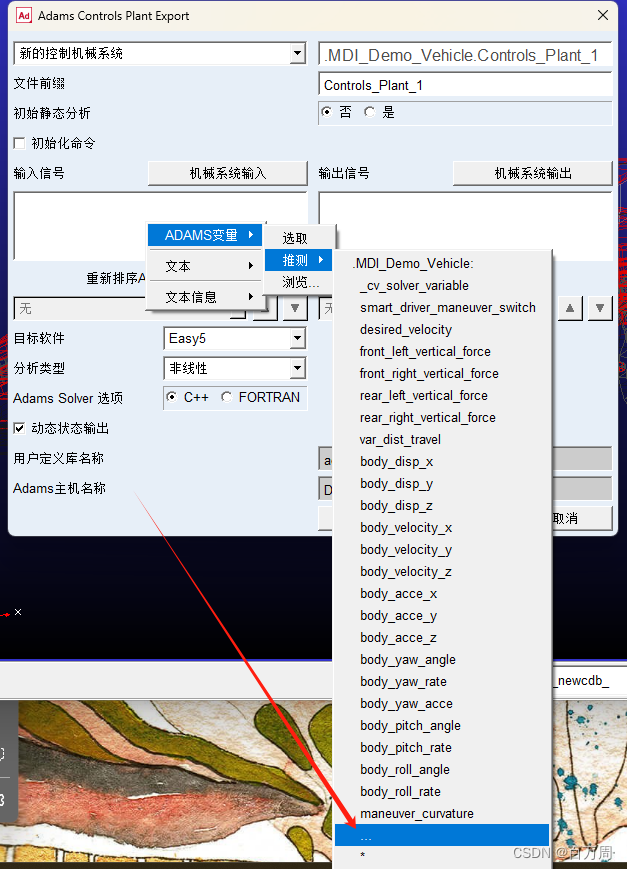
5.双击打开MDI_Demo_Vehicle中的testing,可以选择输入主要有以下几种。

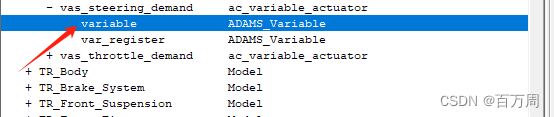
6.这里选择vas_steering_demand中的variable作为输入,双击该选项
7.输入按照第4步,一样的操作。
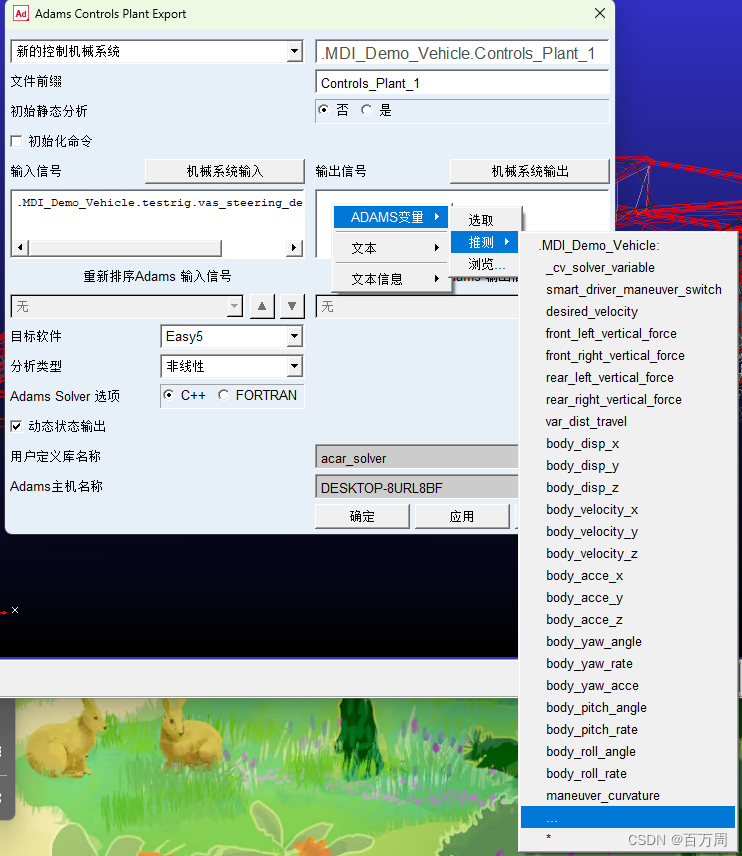
8.选择想要查看的车辆参数,按ctrl多选,然后点下方的确定。
9.将文件前缀改为car_1,并将目标软件改为MATLAB.
其他参考会将adams solver改为FORTRAN。
这里未将adams solver改为FORTRAN。好像没什么影响
设置完点击确定。
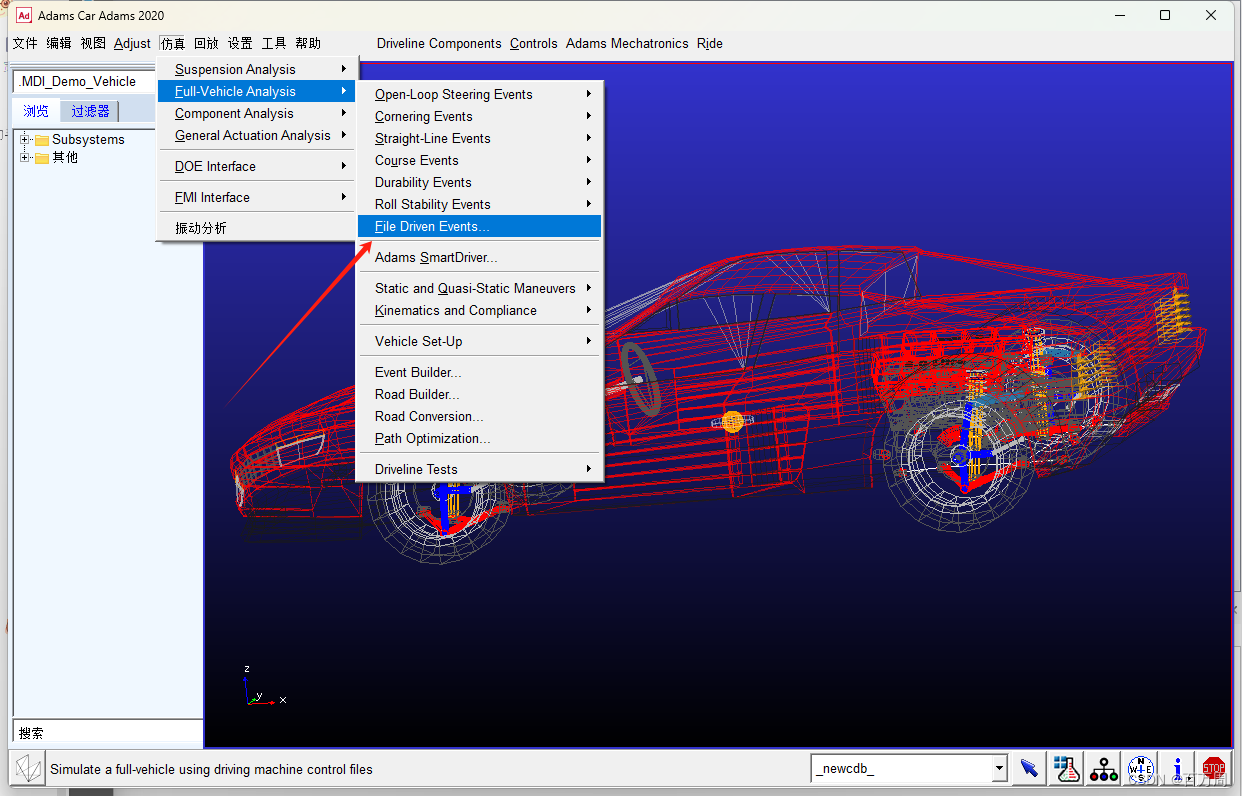
10.生成一个整车仿真文件,点击simulation,选择full vehicle——File Driven Events
11.输出前缀写个test1,分析模式改为仅产生文件,Driver Control Files右键选择自带的acar数据库。
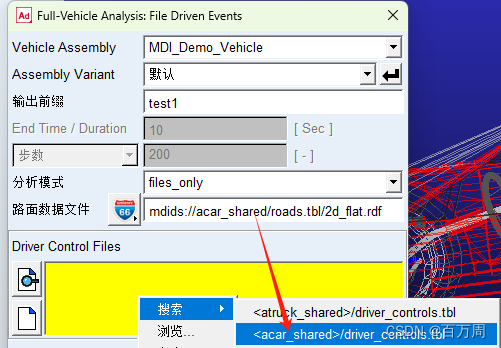
12.随便选一个,做角阶跃转向、Jturn或者其他的,自己选择仿真文件,我选择step_steer_dcf。
13.点击确定,信息栏提示创建成功。
14.Adams操作完成,打开matlab。将工作目录换到之前adams的保存目录。
生成的文件很多,需要用到的就3个。
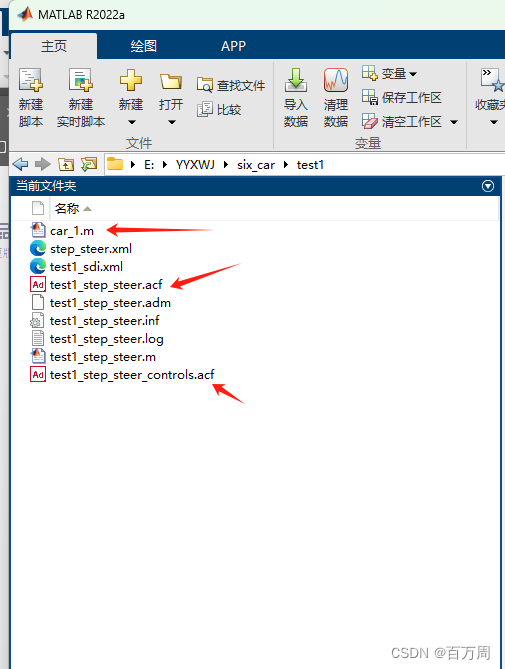
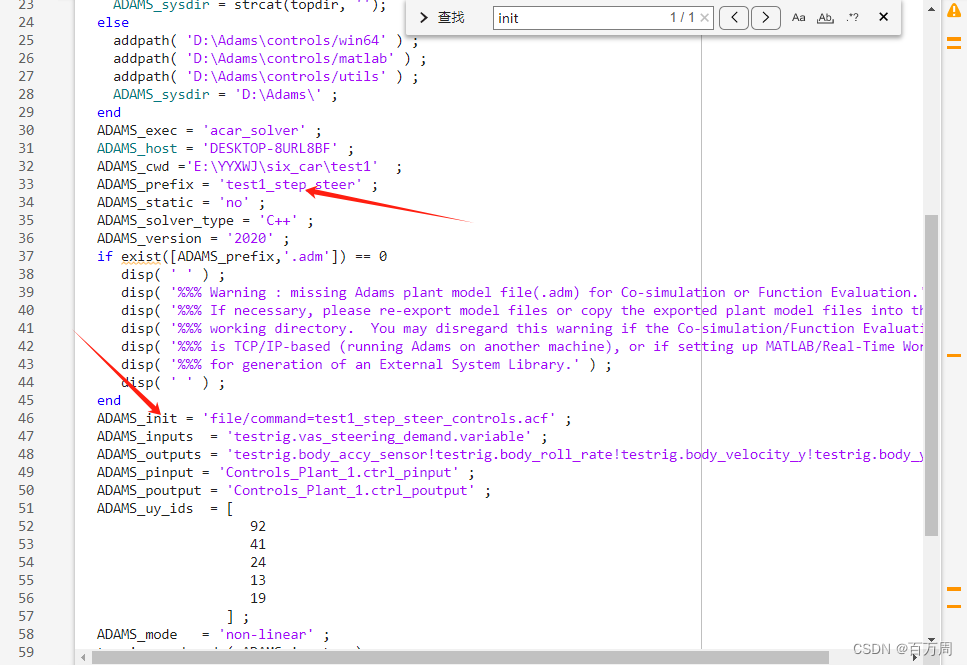
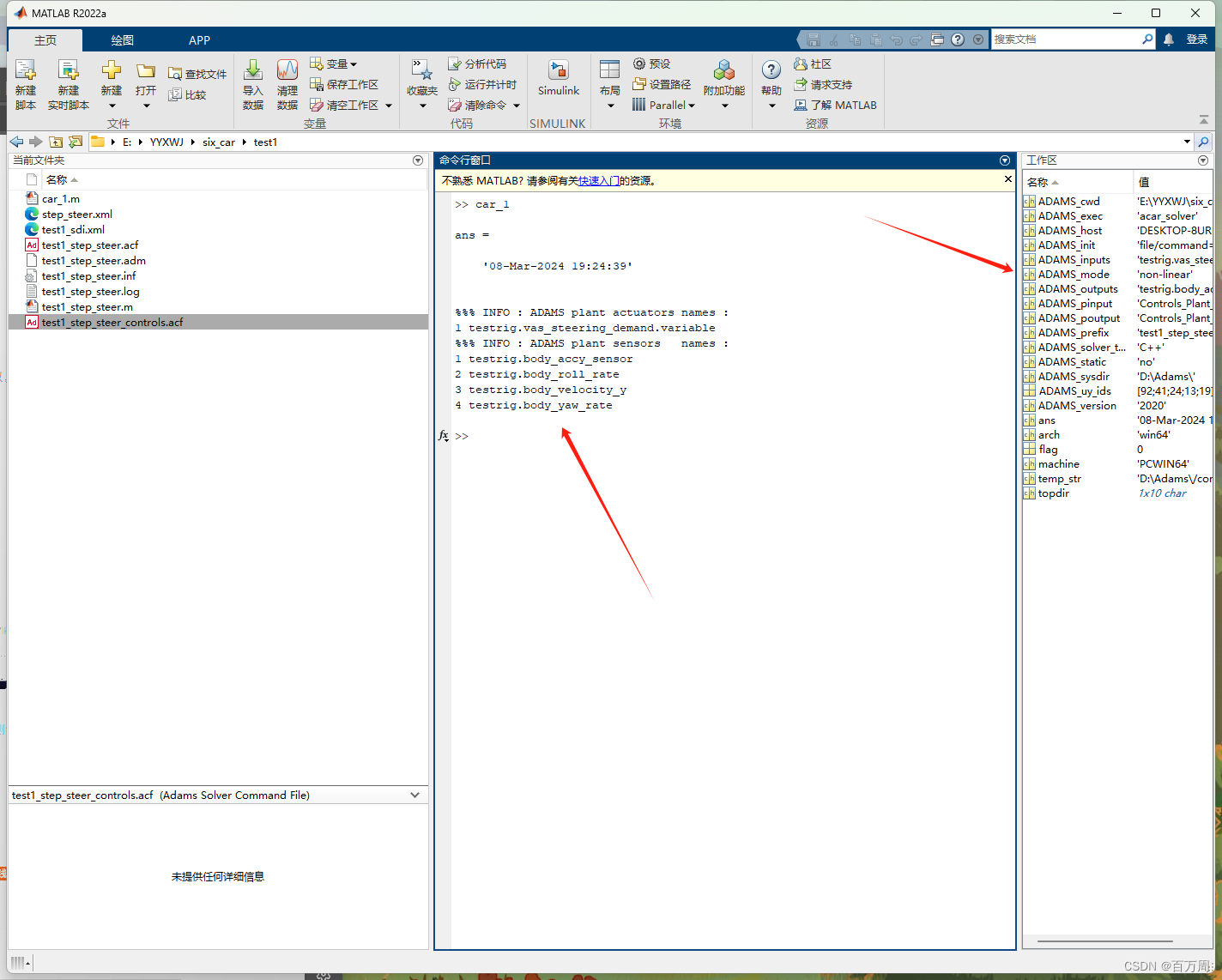
1.在matlab中双击打开car_1。需要改动两个地方。
将ADAMS_prefix = 'car_1' 里面的car_1改为test1_step_steer
将ADAMS_init = 'file/command=car_1_controls.acf'里面的car_1_controls.acf改为test1_step_steer_controls.acf。
2.保存并关闭刚才打开的car_1文件。
3.在matlab中输入car_1,会自动运行该文件,并且右边工作区会出现很多参数。窗口会显示adams中选择的输入输出。
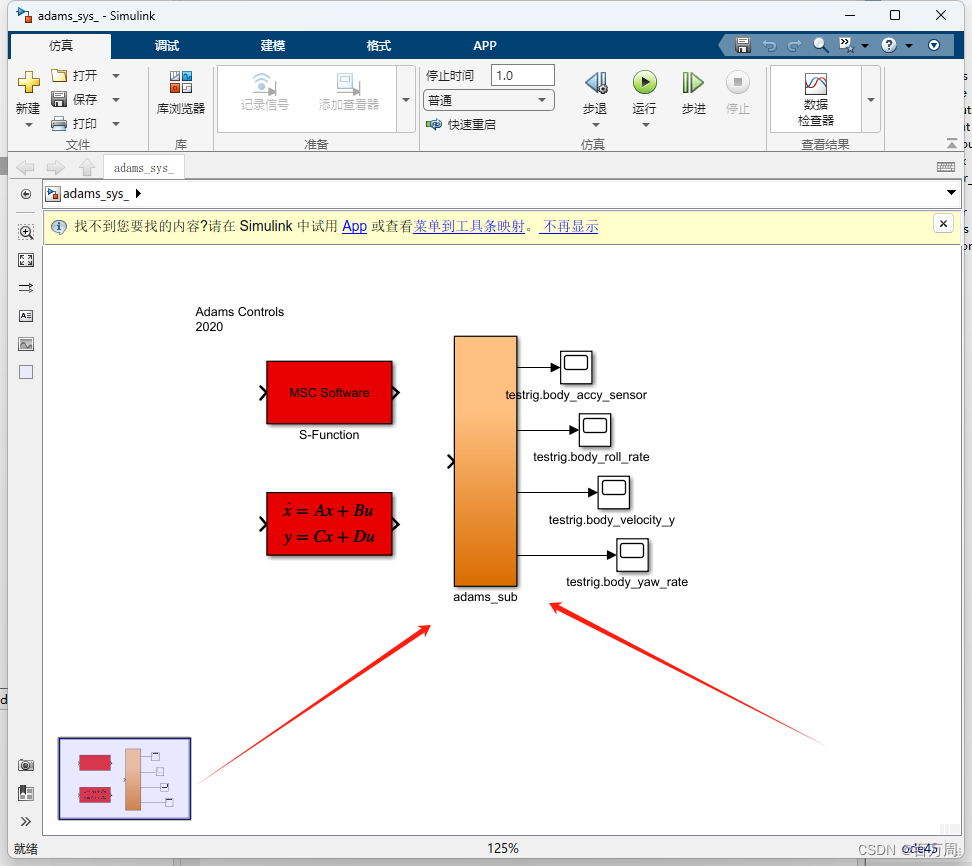
4.继续输入adams_sys。
箭头标记就是adams模型。


















 1473
1473

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











