










第二节 永磁同步电机的FOC及SVPWM
2.1永磁同步电机的FOC
2.2 SVPWM的主要思想
2.3 SVPWM合成矢量所在扇区判断
2.4 SVPWM的扇区基本矢量作用时间
2.5 SVPWM相关公式推导
2.1 永磁同步电机的FOC
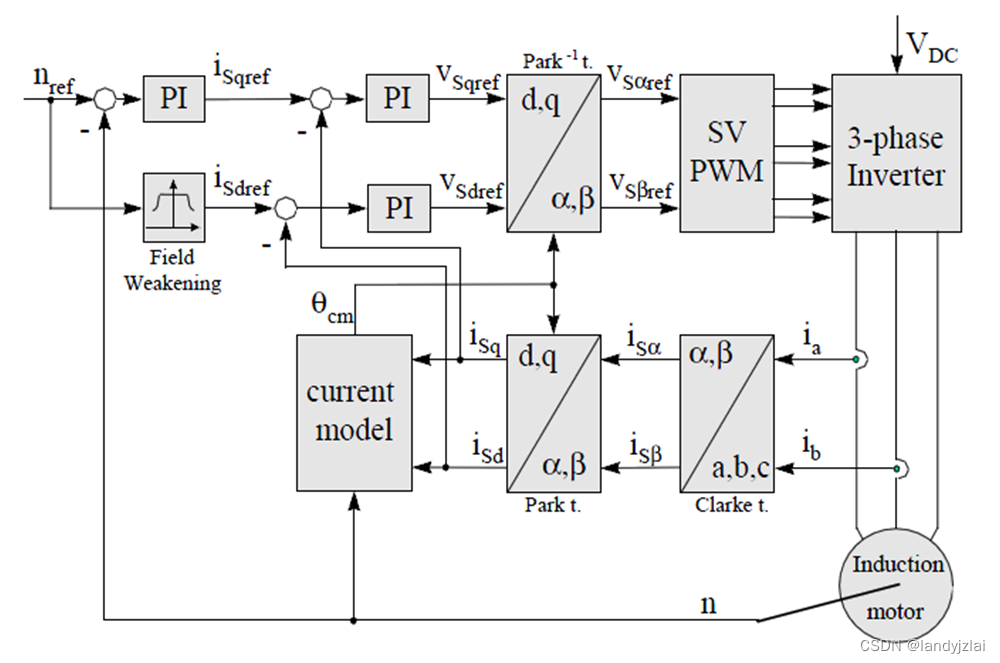
FOC理论架构:
定子电流经过Clark变换后变成两相静止坐标系α-β上的Iα和Iβ,再经过park变换,转化为旋转坐标系上的电流Id和Iq;之后经过与给定的Id’和Iq’比较得到误差,经过PID调节后得到Ud和Uq,接着再经过反park变换得到Uα和Uβ,作为SVPWM的输入;SVPWM输出三相PWM合成调节矢量,带动转子转动,如上图所示。
2.1 永磁同步电机的FOC
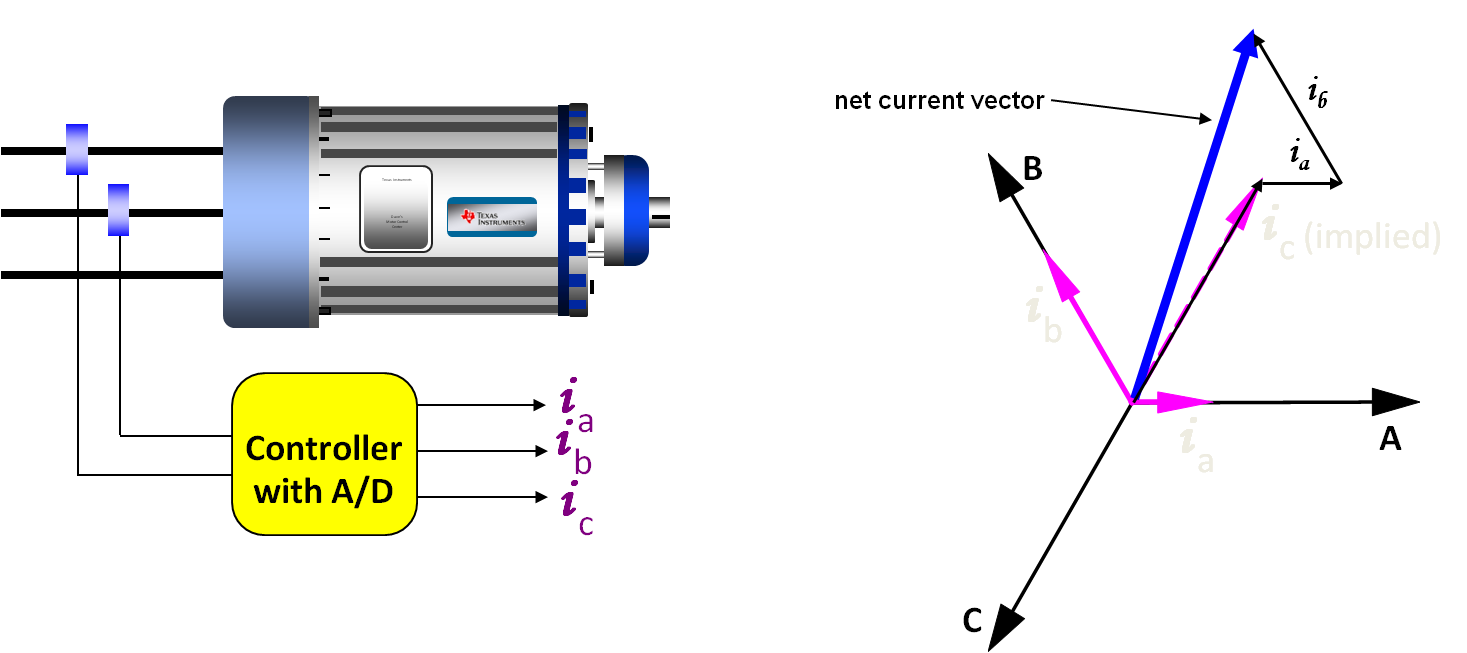
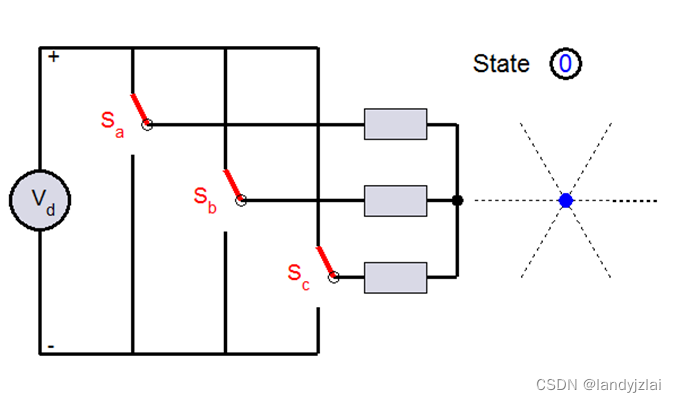
由于我们通的是三相交流电,所以我们我们只需要通过AD模块检测两相电流,便可以根据它们三者之间的相位关系,推出第三相电流值,从而合成所需要的定子磁链,如左图所示。右图所示的矢量合成,可以理解为是AB相进,C相出时对应的矢量合成。
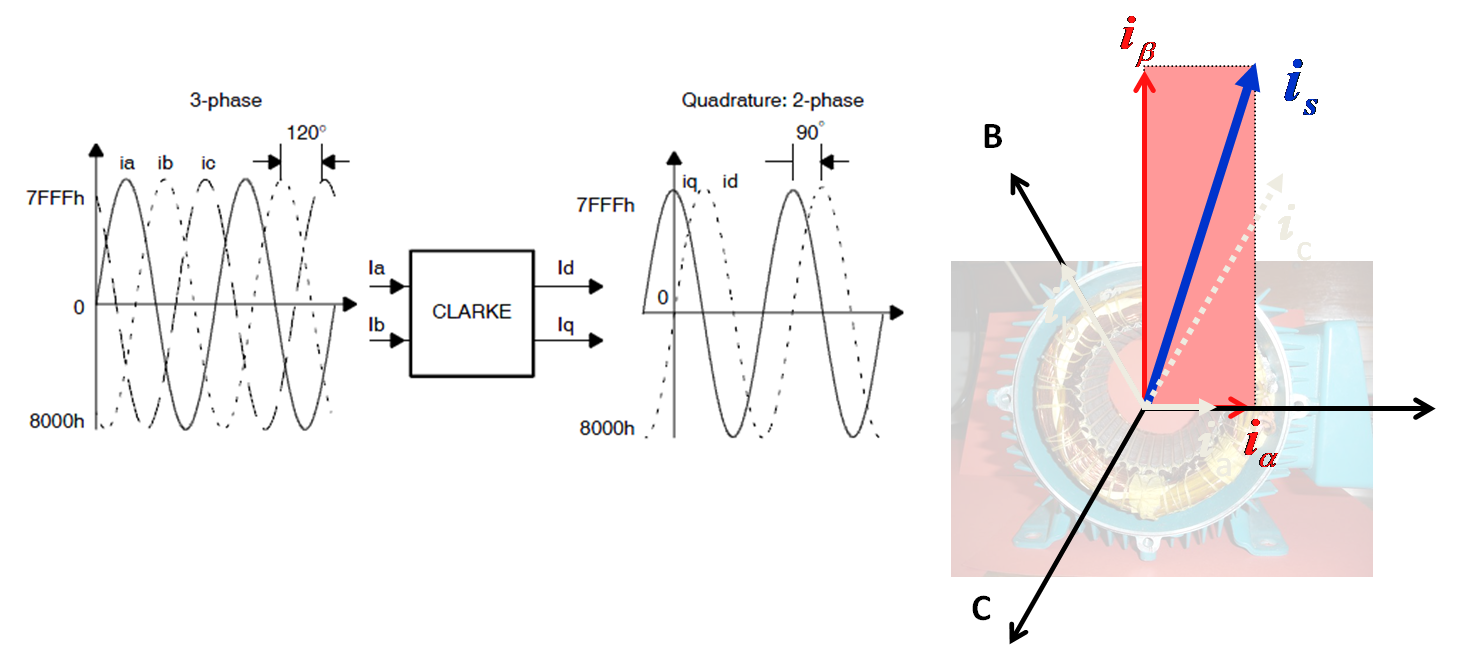
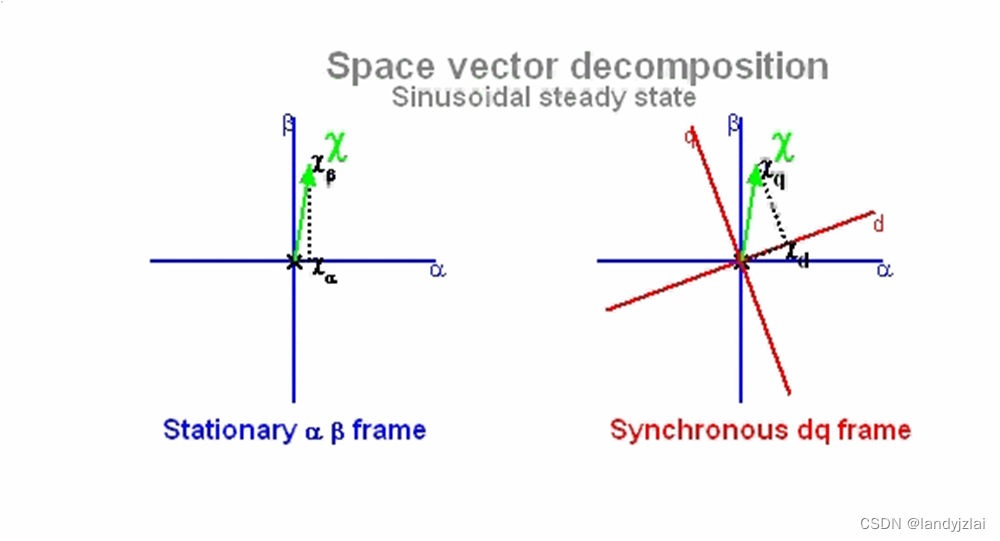
从左图中,我们可以看到三相相位相差120度正弦电流经过Clark变换之后,就变成了两相相位相差90度的正弦交流电。如右图所示,Clark变换就是将三相电流的坐标系转化为相差90度的α-β坐标系,并且保证Iα与Iβ合成的矢量与三相电流合成的矢量大小和方向均相同。
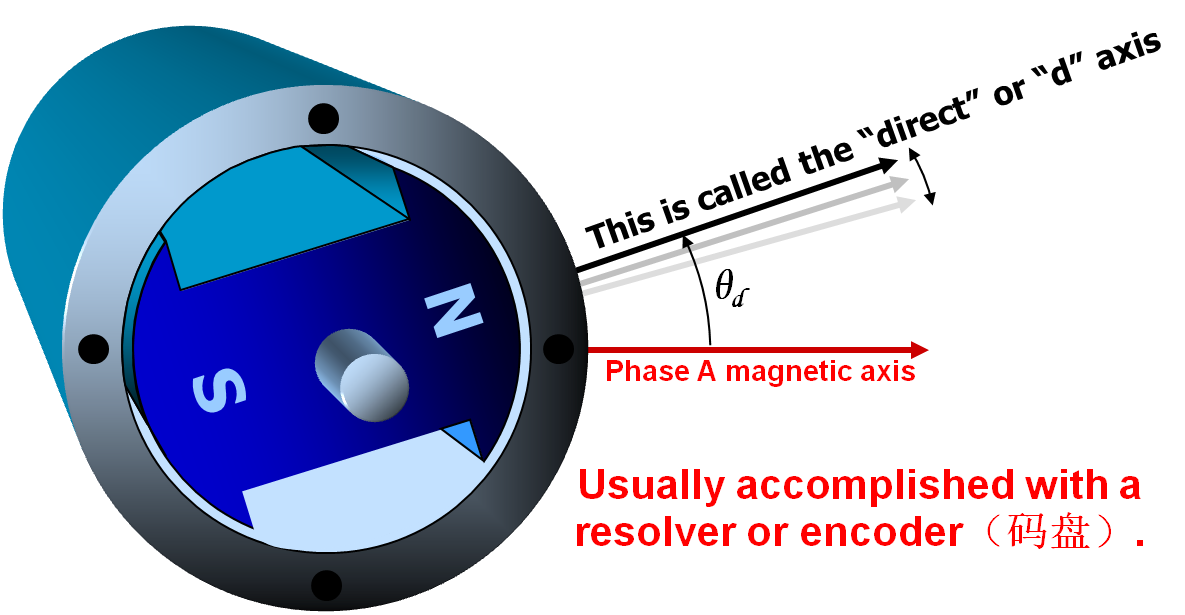
要时刻测量转子所在的位置,以使我们能够重新计算出合适的定子电流速率去合成定子磁链,并保证定子磁链与转子成90度关系。
从前面的叙述中,我们可以知道,当转子转动的时候,定子电流合成的矢量也跟着一起转动。从右图中我们可以看到Iα与Iβ是以正弦波的形式变化的,但是我们要时刻调整这个正弦波使得其合成的矢量始终超前或滞后转子磁链就显得很困难,尤其是高频正弦波的时候。所以,我们可以通过park变换,将两相静止的α-β坐标系转化为两相正交旋转的d-q坐标系。并且使Id和Iq合成的矢量的大小与方向与Iα与Iβ合成的矢量相同。
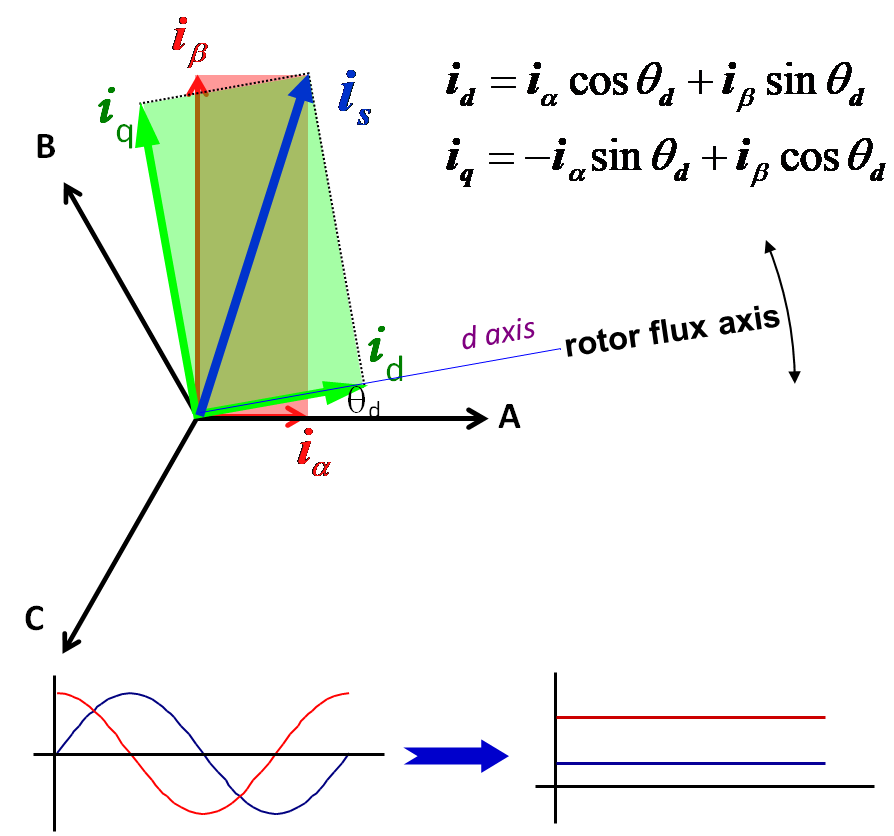
如上图所示,经过park变换之后,以正弦波变化的Iα与Iβ变成了直流形式的Id和Iq。
这样,我们就可以用控制直流电机的方式来控制交流电机了。

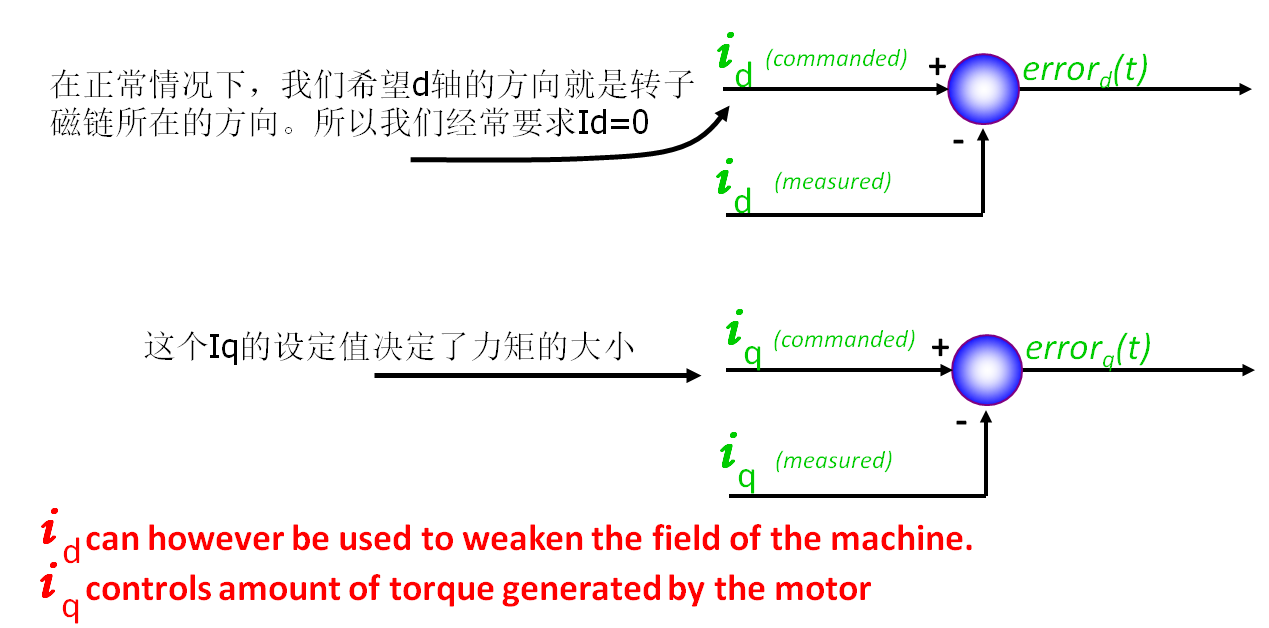
How Do You Control Torque on a PMSM?
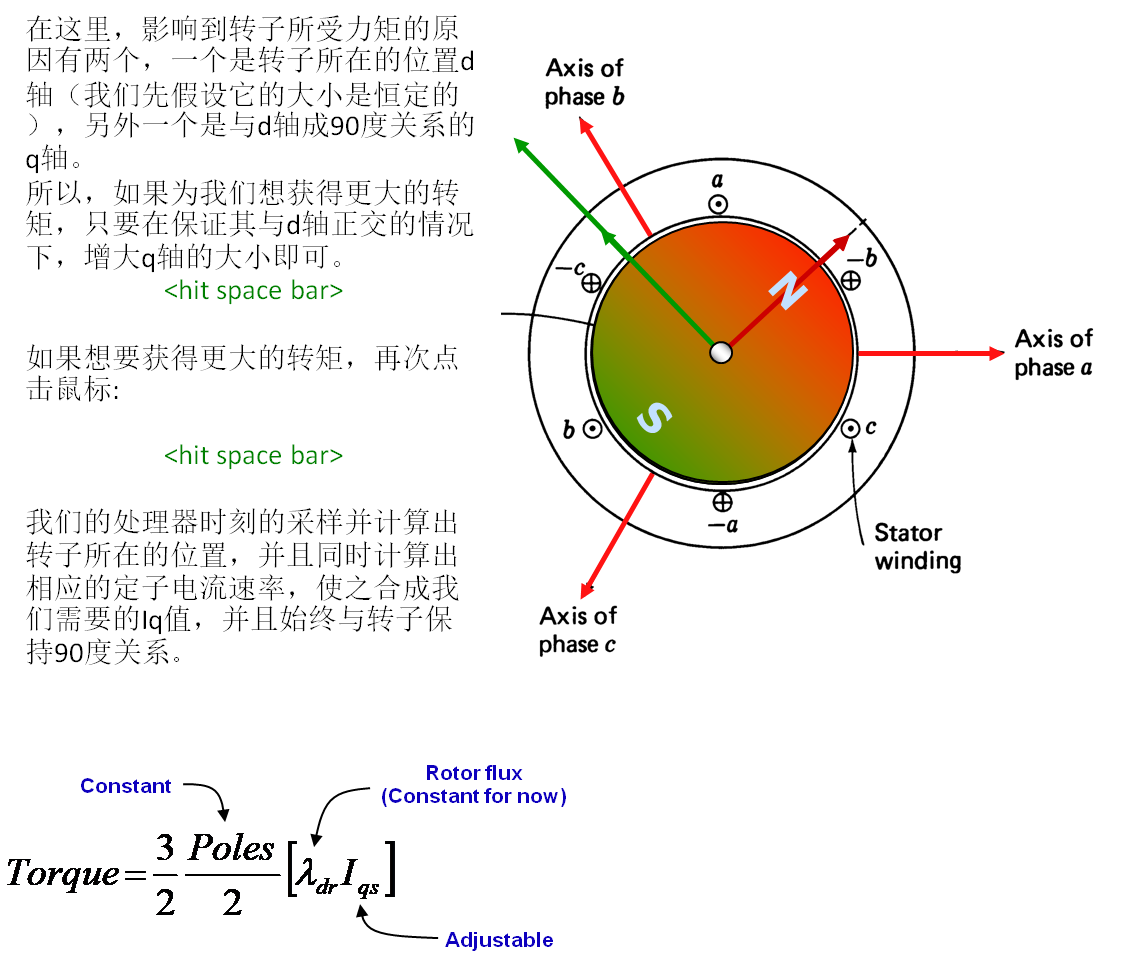
在这里,影响到转子所受力矩的原因有两个,一个是转子所在的位置d轴(我们先假设它的大小是恒定的),另外一个是与d轴成90度关系的q轴。
所以,如果为我们想获得更大的转矩,只要在保证其与d轴正交的情况下,增大q轴的大小即可。
如果想要获得更大的转矩,再次点击鼠标:
我们的处理器时刻的采样并计算出转子所在的位置,并且同时计算出相应的定子电流速率,使之合成我们需要的Iq值,并且始终与转子保持90度关系。
将测得的Id和Iq与给定的Id’和Iq’比较得到误差,经过PI调节后得到Ud和Uq,
接着再经过反park变换得到U α和U β,作为SVPWM的输入
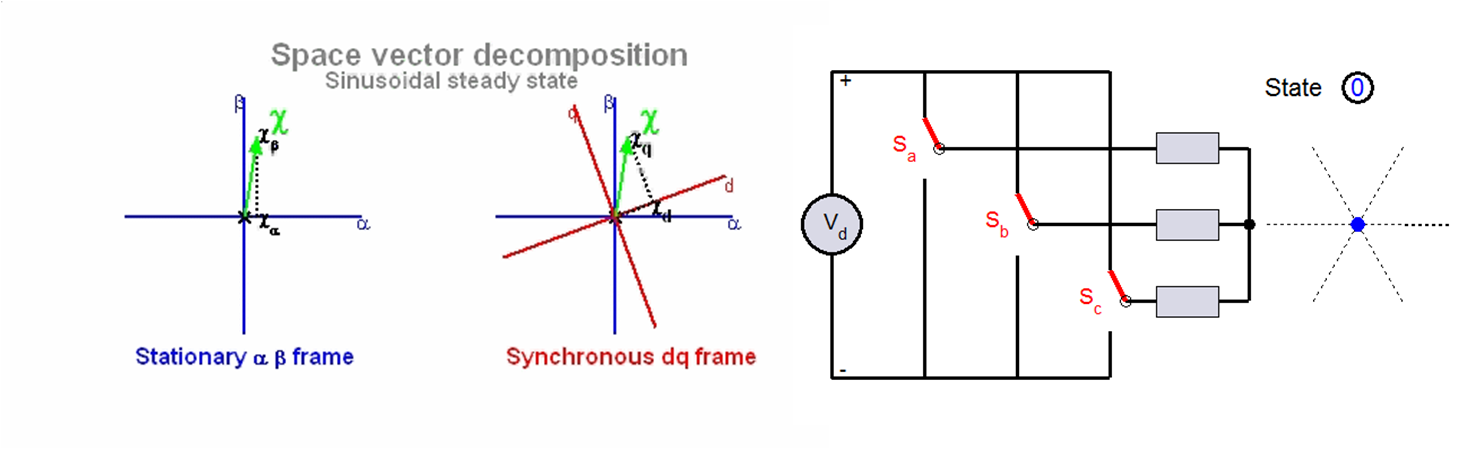
2.2 SVPWM的主要思想
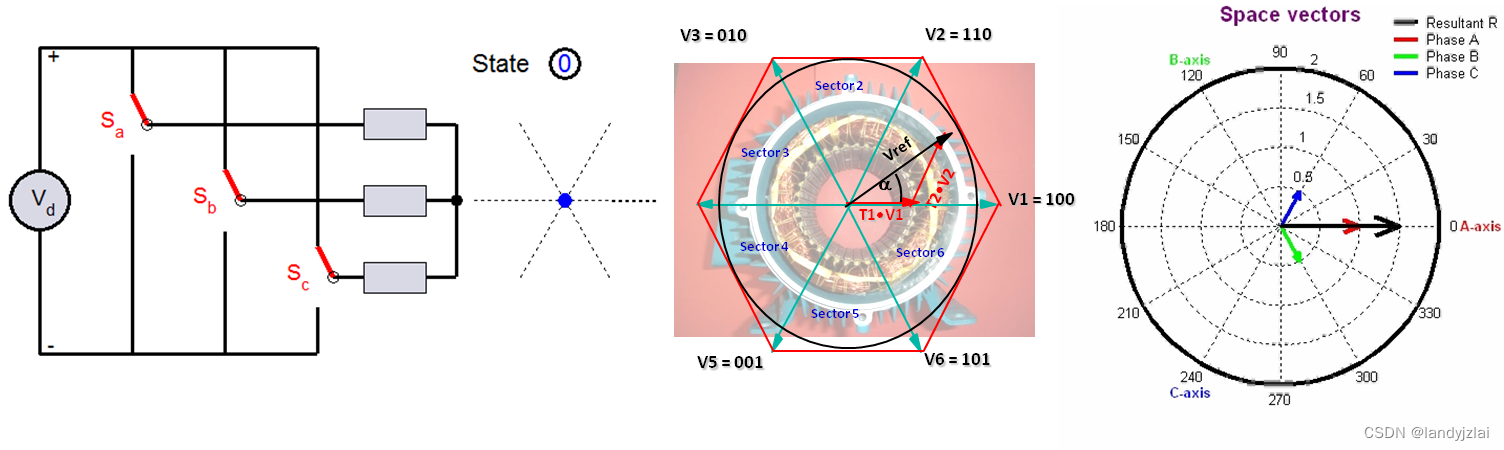
SVPWM的主要思想是以三相对称正弦波电压供电时三相对称电动机定子磁链圆为参考标准,通过三相逆变器的不同开关模式对应的不同空间矢量的相互作用,使之合成实际的磁链矢量,并使合成的实际磁链矢量终点的运动轨迹近似的逼近其理想的磁链圆,从而带动电机转动,如下图所示。
而SVPWM需要理解的主要有2点,一个是合成矢量所在扇区的判断,一个是扇区基本矢量的作用时间。
合成矢量所在扇区判断
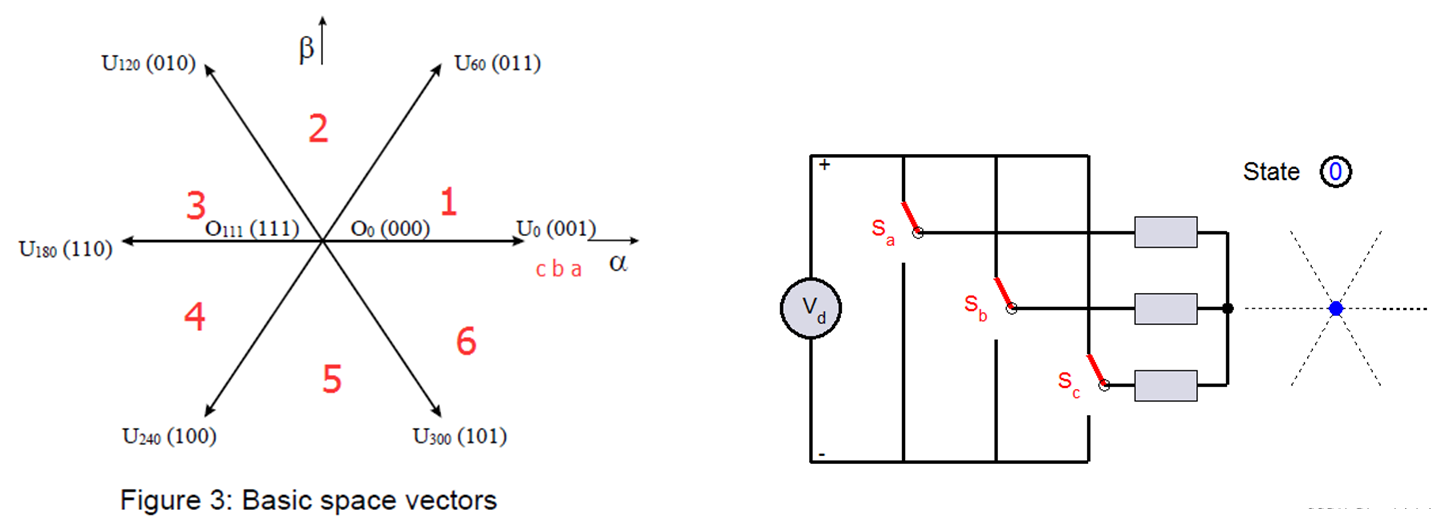
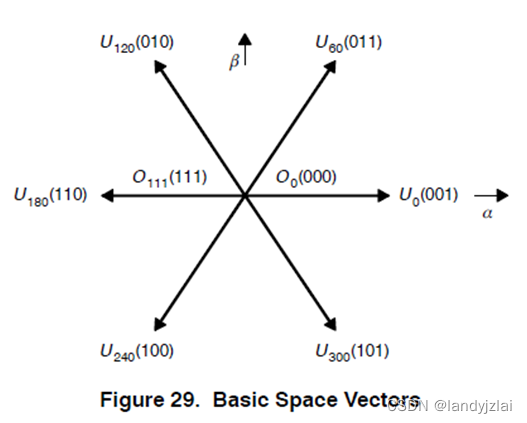
我们可以将空间等效的看成是由六个不同的空间矢量以原点为中心,所组成的正六边形。通过这些空间矢量将这个正六边形等效的分为六个扇区。
每个扇区分别对应两个基本矢量和一个零矢量,通过三相逆变器的不同开关状态来产成相应的PWM波形,通过三相PWM导通的不同顺序所产生的高低电平持续时间,来表示对应的不同的空间矢量,如上图所示。
SVPWM合成矢量所在扇区判断
假设我们合成的实际矢量落在第 I 扇区,可知其等价条件如下:0º<arctan(Uβ/Uα)<60 º
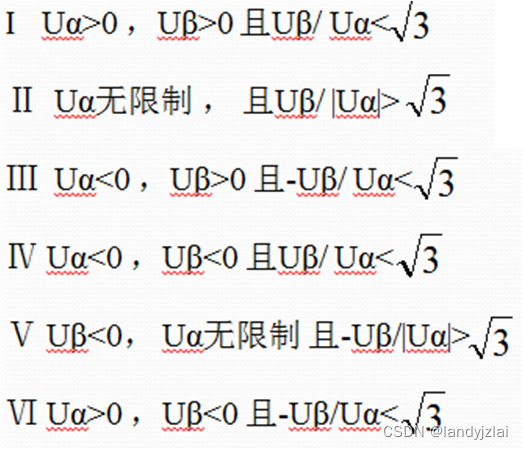
所以,我们可以根据正切函数tan的值来建立实际合成矢量所在扇区判断的充要条件:
2.3 合成矢量所在扇区判断
根据上述充要条件,我们可以建立一个通式:
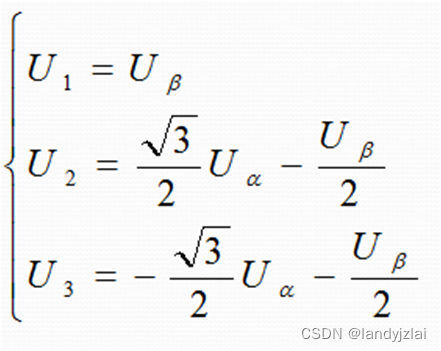
如果U1=U β=cos wt,那么U2=cos(wt-120º),U3=cos(wt+120 º)
因为Uα与U β是相差90 º,故Uα=sin wt
再定义,若U1>0 ,则 A=1,否则 A=0; 若U 2>0 ,则 B=1,否则 B=0;若U3>0 ,则 C=1,否则 C=0。
建立通式N=4C+2B+A
假设合成矢量位于扇区1,有U1>0 U2>0 U3<0 则N=3
假设合成矢量位于扇区2,有U1>0 U2<0 U3<0 则N=1
以此类推 可得,扇区3对应的N=5; 扇区4对应的N=4;扇区5对应的N=6;扇区6对应的N=2;
2.4 SVPWM的扇区基本矢量作用时间
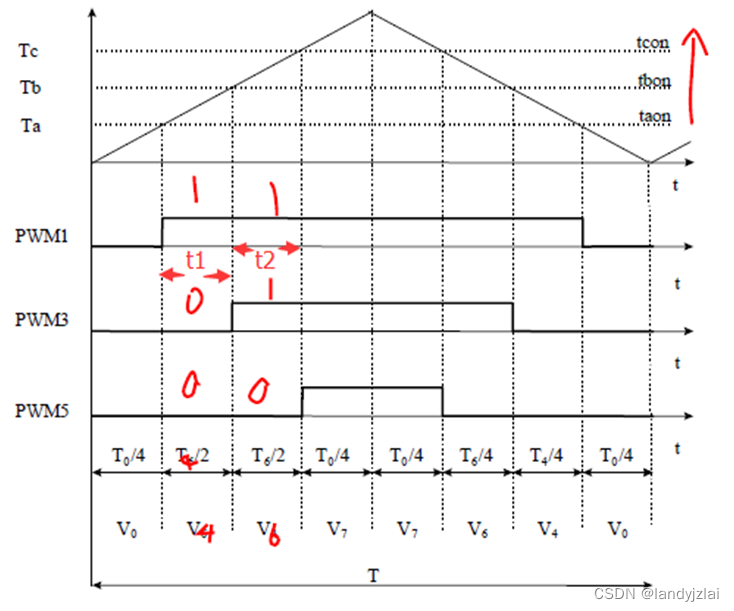
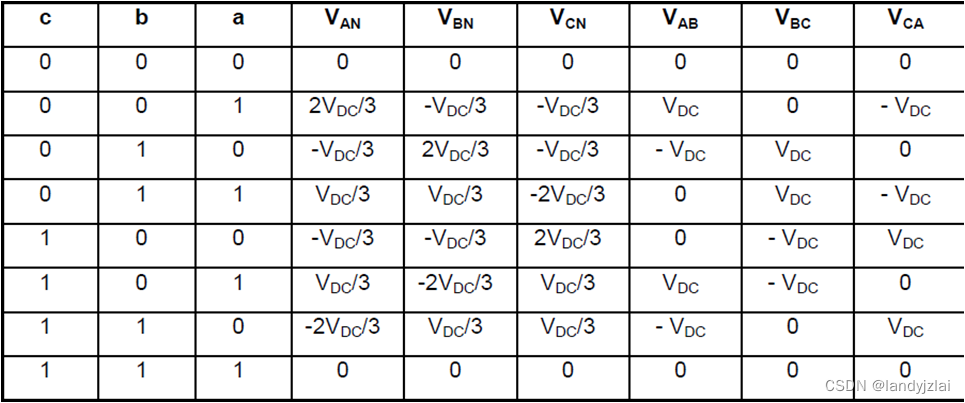
注:基本矢量100对应的开关命名顺序是abc
如上图所示,这是扇区1对应的三角载波PWM图,这里的三角载波,是基于将PWM模块的计数模式设置成增减计数,且时基模块增计数时高跳变,减计数时低跳变所形成的。
当计数达到Ta时,PWM1高跳变,并且计数模块继续计数,此时PWM3/5均未跳变,形成基本矢量100,保持时间为t1=Tb-Ta, 即合成扇区1的基本矢量100的作用时间为t1。以此类推合成扇区1的另外一个基本矢量的110的作用时间为t2=Tc-Tb。
2.4 SVPWM的扇区基本矢量作用时间
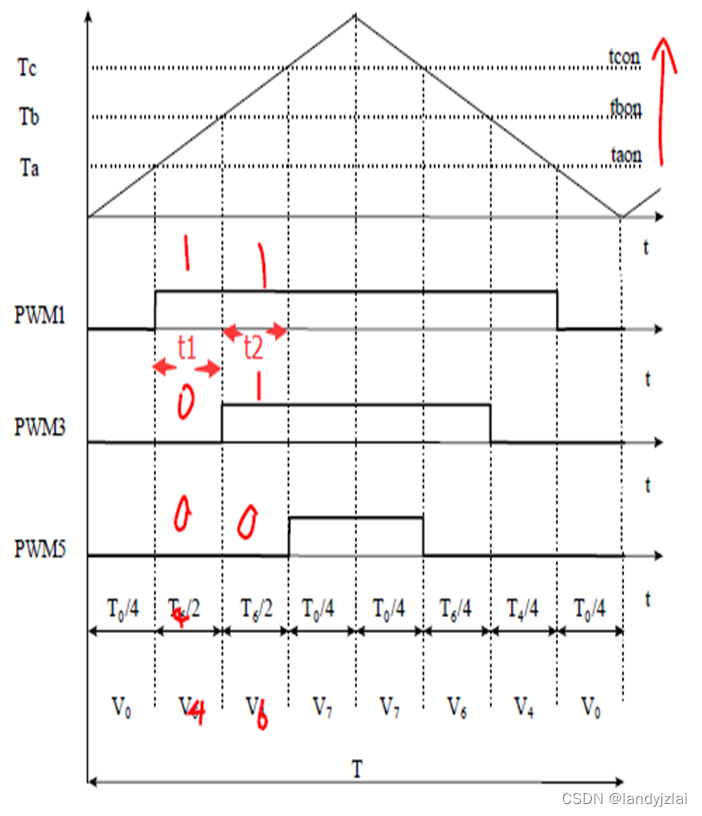
从扇区的基本矢量中,我们还可以看出比较寄存器的先行顺序,拿扇区1的基本矢量100和101(abc)来说。
从100和110我们可以发现当合成矢量位于扇区1时,a相通正电的时间最长,其次是b相,c相则一直都是通以负电。
那么相对应的就是PWM1的占空比最大,即比较寄存器CMPR1先行,其次是CMPR2,最后是CMPR3。
2.5 SVPWM相关公式推导
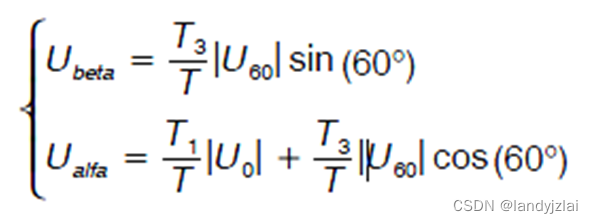
如前面所述, Ualfa和Ubeta作为SVPWM的输入量,在我们的空间矢量作用时间的分析中,其值为:
其推导模型如图2-6所示,
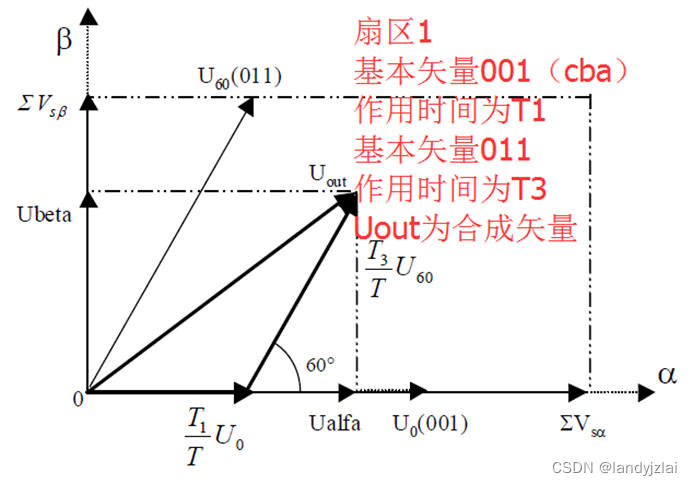 图2-6
图2-6
T1/T代表的是用标么值去表示基本矢量001的作用时间占整个载波周期的比值
|U60|和|U0|是基本矢量的最大值为2VDC/3,VDC是三相逆变器母线电压的值,三相逆变器的模型如图2-7和图2-8所示。
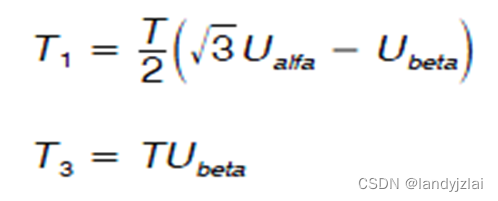
由Ualfa和Ubeta的公式可知,我们最主要的是求出T1和T3。
2.5 SVPWM相关公式推导

图2-7 图2-8
为了求出T1和T3,我们在这里引入一个标么值的概念,即标么值=有名值/基准值,当基准值选取不同时,其标么值也不一样,表示的是物理量及参数的相对值,单位为pu。
如图1-1所示,OL为基本矢量的最大值2VDC/3,选取的基准为正六边形的内切圆半径1/√3,所以此处的标么值为2VDC/3 / (VDC/√3) = 2/√3
以标么值代替|U60|和|U0|的值,代入下列公式即可求出T1和T3。

求出T1和T3
用t1和t2表示T1和T3就是
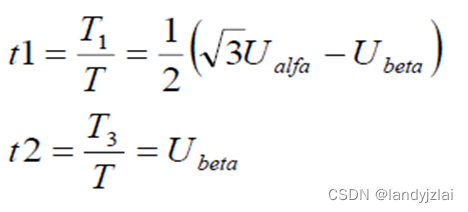
与扇区1的t1和t2作对比,建立通式:

同理,可以求出扇区2的t1和t2
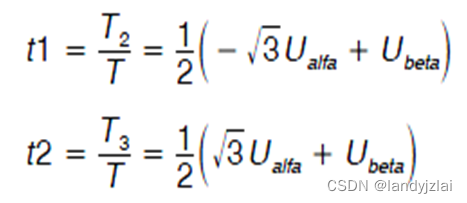
因而,在扇区1时有t1=-Z,t2=X,具体如表2-2所示:


















 933
933

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









