







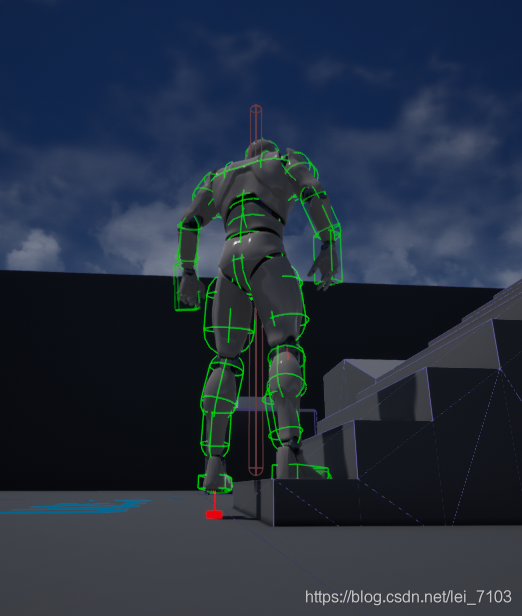
单纯的缩小胶囊体半径来解决办法会存在问题,如果整个将胶囊碰撞器的半径缩小到0,人体会识别为在半空,会自动播放下落状态,所以不可行。
解决方法:1.上下楼梯时,将整个人身体的骨骼自动提升或者降低脚到地面的距离高度。2.上下楼梯时,将整个Mesh自动提升或者降低。
大致的实现方法相似,先使用骨骼提升或者降低。
实现方案:
在人物动画蓝图中使用 Transform Bone 变换(修改) 骨骼 节点,对骨骼进行偏移调整。
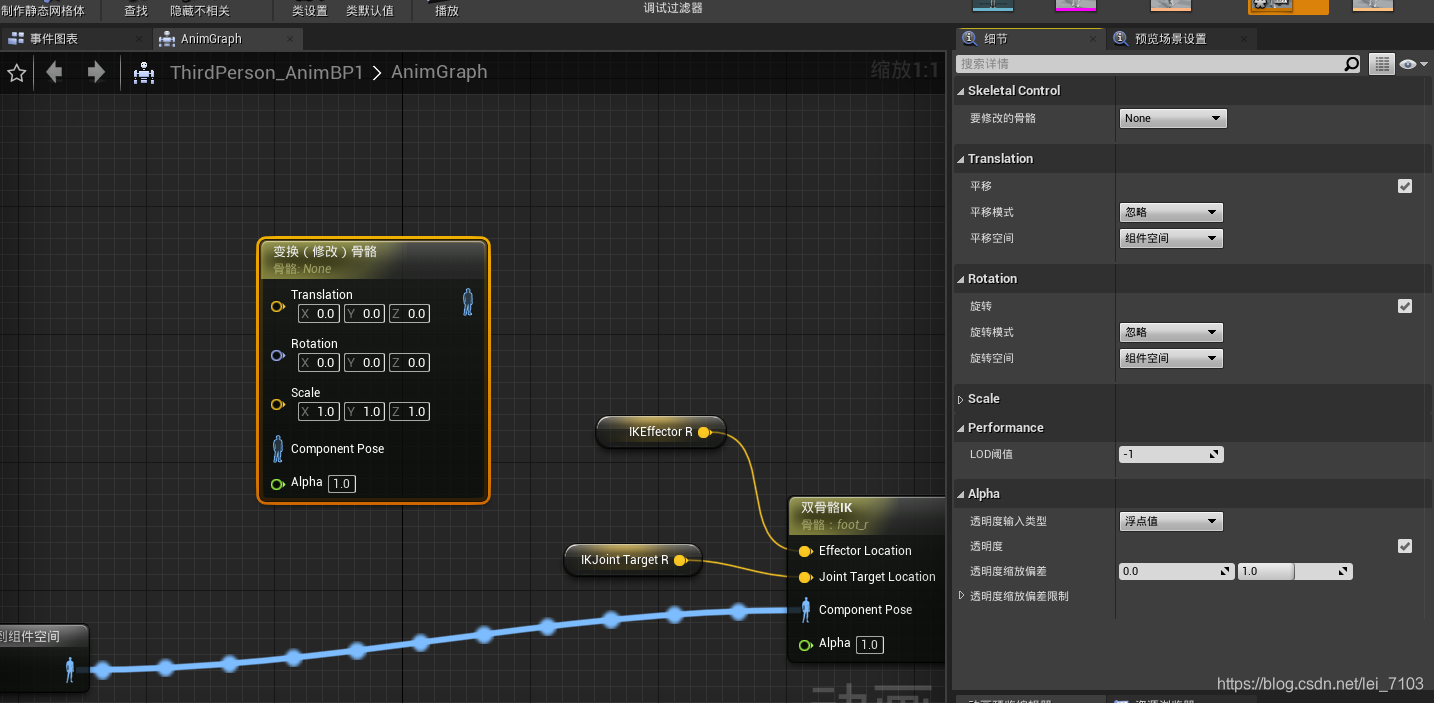
1.该节点,可以控制指定骨骼的位置、旋转、缩放的更改。我们需要对权限较高的骨骼节点进行操作,可以移动整体骨骼,但是不影响IK骨骼。
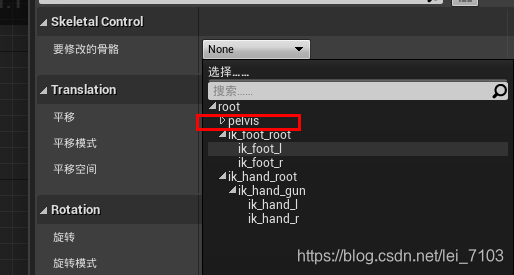
2.选择pelvis (盆骨),在该节点中因为我们当前只使用平移功能,所以可以将旋转缩放后面的对勾去掉,将节点简洁化。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









