






论文
1 Introduction
· 多视角(multi-view)与跨视角(cross-view)的区别:
- 多视角:所有视角注册到图库
- 跨视角:仅一个单一视角注册到图库
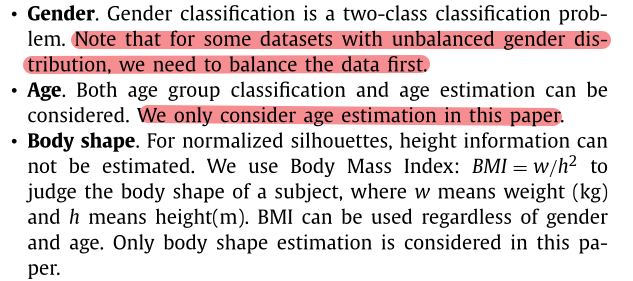
· 软生物特征(soft biometrics)
定义:能为个体识别提供一些信息的特征集合,但是由于缺乏特殊性和持久性,无法区分个体。例如年龄、性别。
作用:通过与生物特征中的主要特征进行融合,从而提高生物特征识别系统的识别精度
· 现有研究的缺漏
- 没有将行人识别以及软生物特征两项任务统一在一个框架中
- 即使有,也不够高效(精度高但识别速度慢)
· 文章的主要贡献:
① 将步态识别与软生物特征识别统一于一个联合框架,并且达到高精度
② 实现了快速的训练、测试与高效的存储
③ 研究得出不同身体部分对于软生物特征识别的贡献

2 Related work
文章的研究中心在appearance-based的方法,并且主要研究视角变换对步态识别的影响。
3 Our method
3.1 Gait Recognition
步态识别即需要捕捉空间信息,也需要捕捉时序信息。需要解决的两个问题:cross-view,cross-walking condition。
通过全连接层融合时间信息有两个好处:
① 得到每个序列的紧凑特征向量,在识别时只需要计算特征向量之间的距离
② 压缩特征向量语句语义意义,属性是在高层隐式学习的
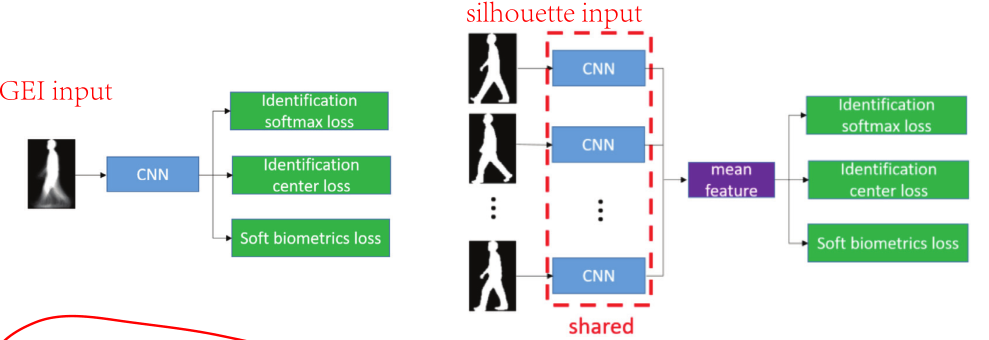
文章考虑了两种时序融合方法:
① 图像级别的融合(GEI)
② 特征级别的融合(全连接层)
3.2 Soft biometrics
与Gait recognition相同的框架,对年龄、性别和BMI指数进行了预测,并且对他们进行了多任务学习。
3.3 Joint analysis
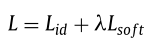
在文章中,将步态识别与软生物特征识别进行了联合分析,模型框架将共享参数,并且在末端针对不同的任务给出不同的损失函数。
解释:软生物特征将减少搜索空间提升识别的表现,而识别将对软生物特征提供更多的监督以减少过拟合。
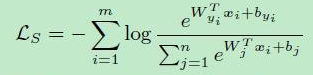
联合损失函数:
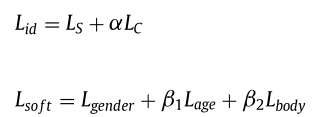
在识别任务上采用softmax loss + center loss可以使一个batch中的每个样本的feature离feature的中心的距离的平方和更小,从而使类间距离大,类内距离小。
4 Network

代码
'''基本块'''
import torch.nn as nn
from torch.nn import functional as F
class BasicConv2d(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size, padding):
super(BasicConv2d, self).__init__()
self.conv = nn.Conv2d(in_channels, out_channels, kernel_size, padding=padding, stride=1)
self.bn = nn.BatchNorm2d(out_channels)
def forward(self, x):
x = self.conv(x)
x = self.bn(x)
return F.relu(x, inplace=True)
class SetBlock(nn.Module):
def __init__(self, forward_block):
super(SetBlock, self).__init__()
self.forward_block = forward_block
def forward(self, x):
n, s, c, h, w = x.size()
x = self.forward_block(x.view(-1, c, h, w))
_, c, h, w = x.size()
return x.view(n, s, c, h, w)
class PoolingBlock(nn.Module):
def __init__(self):
super(PoolingBlock, self).__init__()
self.pool2d = nn.MaxPool2d(2)
def forward(self, x):
n, s, c, h, w = x.size()
x = x.view(-1, c, h, w)
x = self.pool2d(x)
_, c, h, w = x.size()
return x.view(n, s, c, h, w)
def conv3x3(in_planes, out_planes, stride=1):
"""3x3 convolution with padding"""
return nn.Conv2d(in_planes, out_planes, kernel_size=3, stride=stride,
padding=1, bias=False)
def conv1x1(in_planes, out_planes, stride=1):
"""1x1 convolution"""
return nn.Conv2d(in_planes, out_planes, kernel_size=1, stride=stride, bias=False)
class BasicBlock(nn.Module):
expansion = 1
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(BasicBlock, self).__init__()
self.conv1 = conv3x3(inplanes, planes, stride)
self.bn1 = nn.BatchNorm2d(planes)
self.relu = nn.ReLU(inplace=True)
self.conv2 = conv3x3(planes, planes)
self.bn2 = nn.BatchNorm2d(planes)
self.downsample = downsample
self.stride = stride
def forward(self, x):
identity = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
if self.downsample is not None:
identity = self.downsample(x)
out += identity
out = self.relu(out)
return out
'''用于GEI的网络'''
import torch.nn as nn
import torch
from torch.nn import functional as F
from model.network.Basic_Blocks import BasicConv2d, BasicBlock
class GEINet(nn.Module):
def __init__(self):
super(GEINet, self).__init__()
# Conv
_in_channel = 1
_conv_channel = [64, 128, 256, 512]
self.conv_layer1 = BasicConv2d(_in_channel, _conv_channel[0], 3, 1)
self.conv_layer2 = BasicConv2d(_conv_channel[0], _conv_channel[0], 3, 1)
self.conv_layer3 = BasicConv2d(_conv_channel[0], _conv_channel[1], 3, 1)
self.conv_layer4 = BasicConv2d(_conv_channel[1], _conv_channel[2], 3, 1)
self.conv_layer5 = BasicConv2d(_conv_channel[2], _conv_channel[3], 3, 1)
# ResBlocks
_res_channel = [64, 128, 256, 512]
self.resblock1 = self._make_layer(BasicBlock, _res_channel[0], _res_channel[0], 1)
self.resblock2 = self._make_layer(BasicBlock, _res_channel[1], _res_channel[1], 2)
self.resblock3 = self._make_layer(BasicBlock, _res_channel[2], _res_channel[2], 5)
self.resblock4 = self._make_layer(BasicBlock, _res_channel[3], _res_channel[3], 3)
# Pooling
self.pooling = nn.MaxPool2d(2)
# 线性层
self.linear_layer1 = nn.Linear(512 * 4 * 4, 512)
for m in self.modules():
if isinstance(m, (nn.Conv2d, nn.Conv1d)):
nn.init.xavier_uniform_(m.weight.data)
elif isinstance(m, nn.Linear):
nn.init.xavier_uniform_(m.weight.data)
nn.init.constant(m.bias.data, 0.0)
elif isinstance(m, (nn.BatchNorm2d, nn.BatchNorm1d)):
nn.init.normal_(m.weight.data, 1.0, 0.02)
nn.init.constant_(m.bias.data, 0.0)
def _make_layer(self, block, inplanes, planes, blocks):
layers = []
for _ in range(0, blocks):
layers.append(block(inplanes, planes))
return nn.Sequential(*layers)
def forward(self, x):
x = self.conv_layer1(x) # 8 64 64 64
x = self.conv_layer2(x) # 8 64 64 64
x = self.pooling(x) # 8 64 32 32
x = self.resblock1(x) # 8 64 32 32
x = self.conv_layer3(x) # 8 128 32 32
x = self.pooling(x) # 8 128 16 16
x = self.resblock2(x) # 8 128 16 16
x = self.conv_layer4(x) # 8 256 16 16
x = self.pooling(x) # 8 256 8 8
x = self.resblock3(x) # 8 256 8 8
x = self.conv_layer5(x) # 8 512 8 8
x = self.pooling(x) # 8 512 4 4
x = self.resblock4(x) # 8 512 4 4
x = x.reshape(x.shape[0], 512 * 4 * 4) # 8 512 * 4 * 4
x = self.linear_layer1(x) # 8 512
return x
'''用于序列的网络'''
import torch.nn as nn
import torch
from torch.nn import functional as F
from model.network.Basic_Blocks import BasicConv2d, SetBlock, PoolingBlock, BasicBlock
class GEINet(nn.Module):
def __init__(self):
super(GEINet, self).__init__()
# Conv
_in_channel = 1
_conv_channel = [64, 128, 256, 512]
self.conv_layer1 = SetBlock(BasicConv2d(_in_channel, _conv_channel[0], 3, 1))
self.conv_layer2 = SetBlock(BasicConv2d(_conv_channel[0], _conv_channel[0], 3, 1))
self.conv_layer3 = SetBlock(BasicConv2d(_conv_channel[0], _conv_channel[1], 3, 1))
self.conv_layer4 = SetBlock(BasicConv2d(_conv_channel[1], _conv_channel[2], 3, 1))
self.conv_layer5 = SetBlock(BasicConv2d(_conv_channel[2], _conv_channel[3], 3, 1))
# ResBlocks
_res_channel = [64, 128, 256, 512]
self.resblock1 = SetBlock(self._make_layer(BasicBlock, _res_channel[0], _res_channel[0], 1))
self.resblock2 = SetBlock(self._make_layer(BasicBlock, _res_channel[1], _res_channel[1], 2))
self.resblock3 = SetBlock(self._make_layer(BasicBlock, _res_channel[2], _res_channel[2], 5))
self.resblock4 = SetBlock(self._make_layer(BasicBlock, _res_channel[3], _res_channel[3], 3))
# Pooling
self.pooling = PoolingBlock()
# 线性层
self.linear_layer1 = nn.Linear(512 * 4 * 4, 512)
for m in self.modules():
if isinstance(m, (nn.Conv2d, nn.Conv1d)):
nn.init.xavier_uniform_(m.weight.data)
elif isinstance(m, nn.Linear):
nn.init.xavier_uniform_(m.weight.data)
nn.init.constant(m.bias.data, 0.0)
elif isinstance(m, (nn.BatchNorm2d, nn.BatchNorm1d)):
nn.init.normal_(m.weight.data, 1.0, 0.02)
nn.init.constant_(m.bias.data, 0.0)
def _make_layer(self, block, inplanes, planes, blocks):
layers = []
for _ in range(0, blocks):
layers.append(block(inplanes, planes))
return nn.Sequential(*layers)
def forward(self, x):
x = x.unsqueeze(2) # 8 30 1 64 64
x = self.conv_layer1(x) # 8 30 64 64 64
x = self.conv_layer2(x) # 8 30 64 64 64
x = self.pooling(x) # 8 30 64 32 32
x = self.resblock1(x) # 8 30 64 32 32
x = self.conv_layer3(x) # 8 30 128 32 32
x = self.pooling(x) # 8 30 128 16 16
x = self.resblock2(x) # 8 30 128 16 16
x = self.conv_layer4(x) # 8 30 256 16 16
x = self.pooling(x) # 8 30 256 8 8
x = self.resblock3(x) # 8 30 256 8 8
x = self.conv_layer5(x) # 8 30 512 8 8
x = self.pooling(x) # 8 30 512 4 4
x = self.resblock4(x) # 8 30 512 4 4
x = x.mean(1) # 8 512 4 4
x = x.reshape(x.shape[0], 512 * 4 * 4) # 8 512 * 4 * 4
x = self.linear_layer1(x) # 8 512
return x














 957
957











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









