







Simulink电力电子仿真——(一)概述2
修改电路
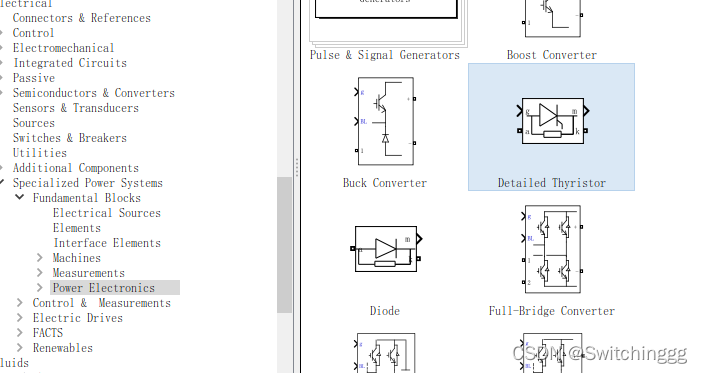
- 晶闸管
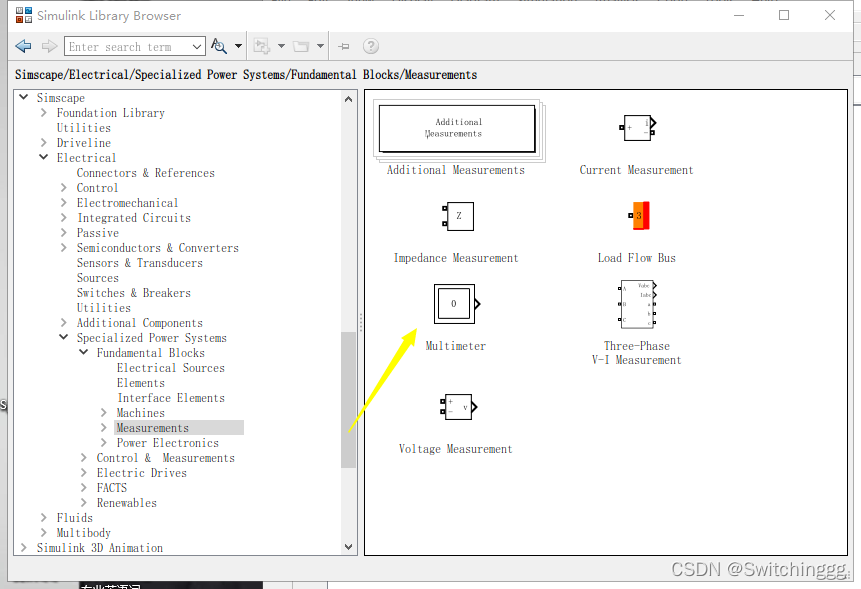
测量使用万用表
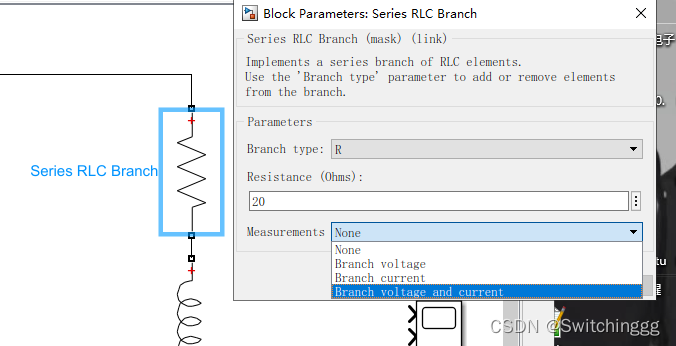
双击需要测量的元器件,可以选择需要测量的量
双击万用表即可显示想要测量的物理量
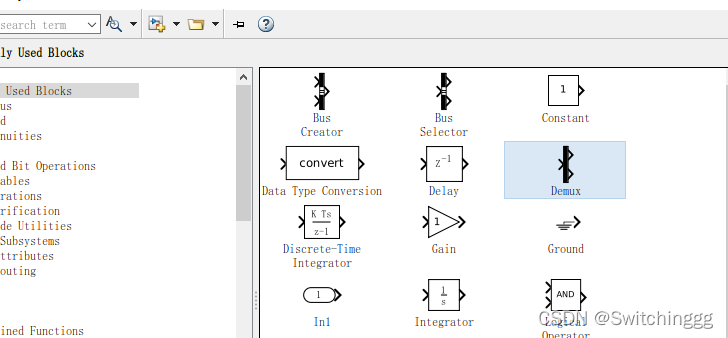
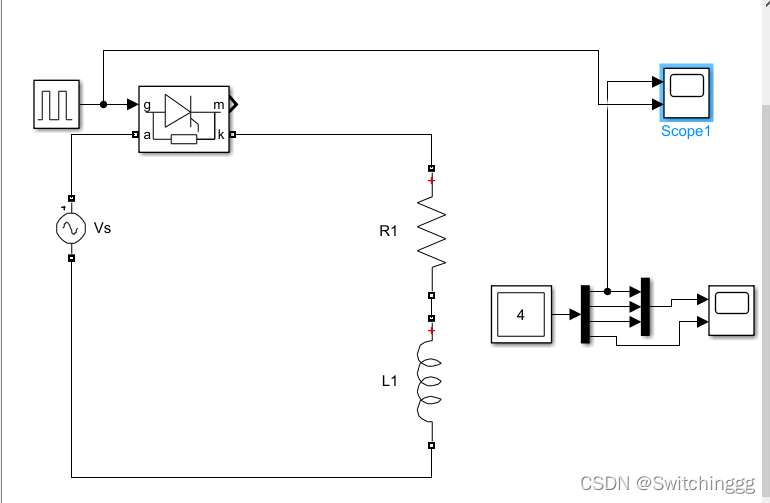
要分开信号,分别添加到示波器中,所以使用demux
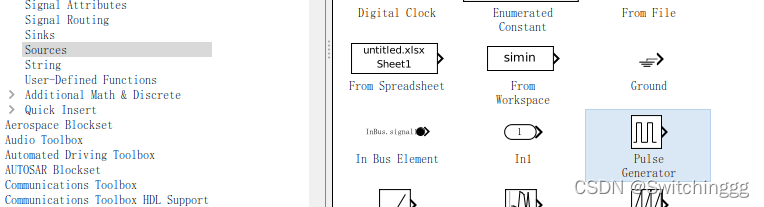
最后,再给晶闸管添加一个触发信号
设置一下,因为是50Hz,所以周期是1/50,然后相位延迟45度,不用计算具体值,直接写45/360*(1/50),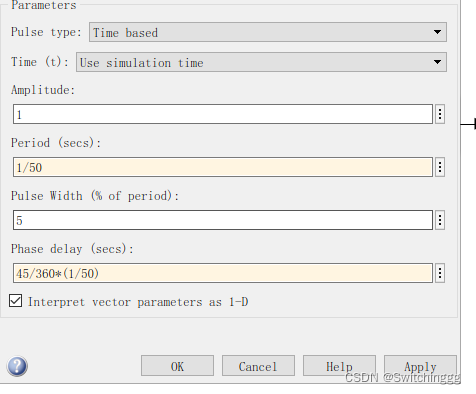
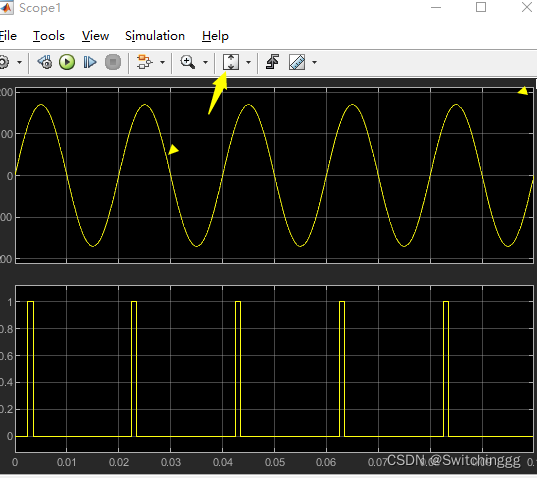
运行仿真
点击下图中按键为使波形自适应屏幕
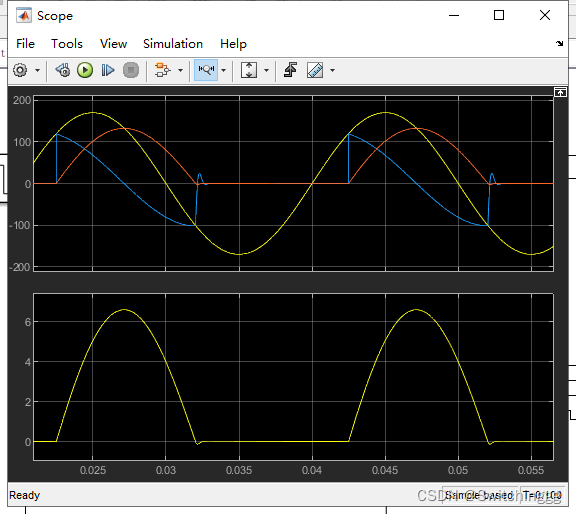
测量电路参数
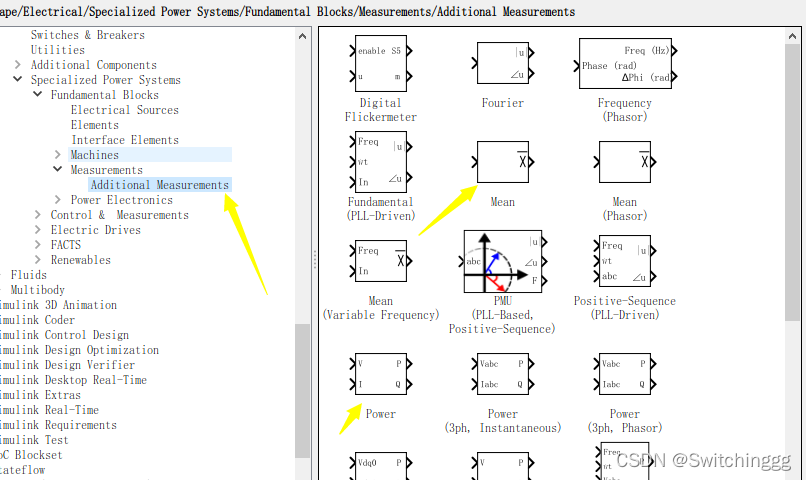
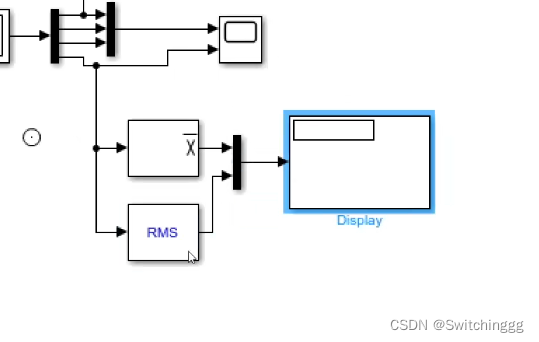
Mean 平均值
RMS 有效值
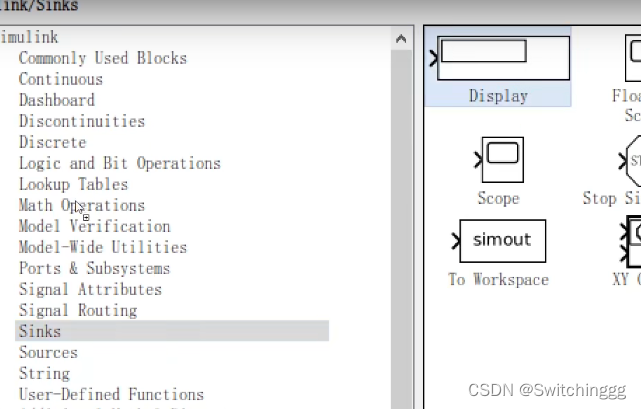
在sinks里面选择display,将两个信号输出
然后设置一下两个测量器件的频率为50Hz。
将simulink中的数据导出到MATLAB工作区
直接导出数据和绘制波形
视频的50分钟处

















 95
95

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









