







提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
前言
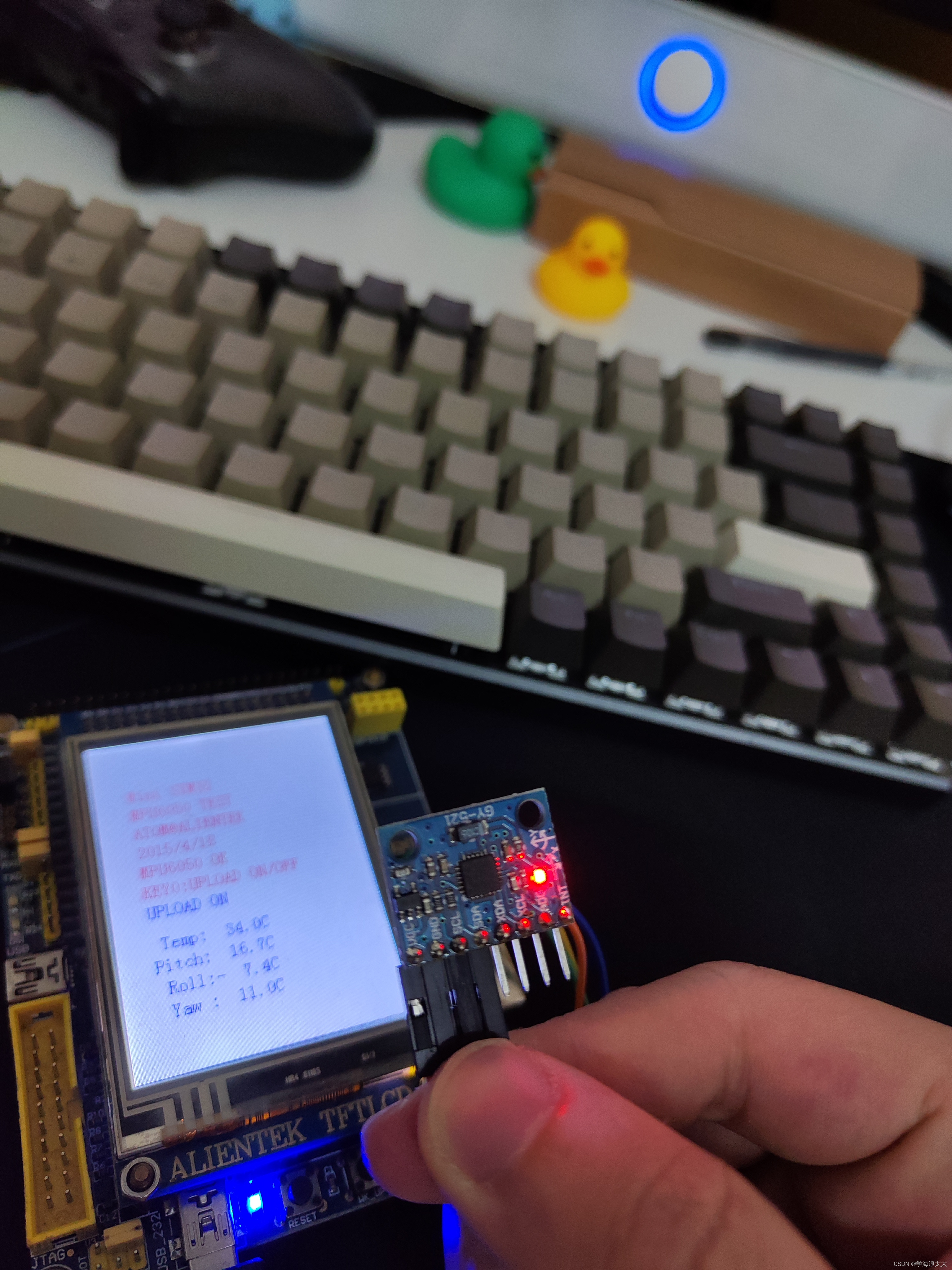
记录六轴陀螺仪
其“六轴”分别为加速度xyz轴,角速度xyz轴
俯仰角(车头绕Y轴翘起角度),
航向角(车身绕Z轴旋转角度),
翻滚角(侧轮绕X轴抬起角度)。
一、简单实现,接线,i2c,主要代码
1.引脚使用了PC12(SCL),PC11(SDA)
2.sensor初始化
//其中一些寄存器写成宏放在头文件,初始化和读出传感器的值中写寄存器需要阅读数据手册,根据手册步骤完成
#define MPU_GYRO_XOUTH_REG 0X43 //陀螺仪值,X轴高8位寄存器
#define MPU_GYRO_XOUTL_REG 0X44 //陀螺仪值,X轴低8位寄存器
#define MPU_GYRO_YOUTH_REG 0X45 //陀螺仪值,Y轴高8位寄存器
#define MPU_GYRO_YOUTL_REG 0X46 //陀螺仪值,Y轴低8位寄存器
#define MPU_GYRO_ZOUTH_REG 0X47 //陀螺仪值,Z轴高8位寄存器
#define MPU_GYRO_ZOUTL_REG 0X48 //陀螺仪值,Z轴低8位寄存器
u8 MPU_Init(void)
{
u8 res;
MPU_IIC_Init();//初始化IIC总线
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X80); //复位MPU6050
delay_ms(100);
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X00); //唤醒MPU6050
MPU_Set_Gyro_Fsr(3); //陀螺仪传感器,±2000dps
MPU_Set_Accel_Fsr(0); //加速度传感器,±2g
MPU_Set_Rate(50); //设置采样率50Hz
MPU_Write_Byte(MPU_INT_EN_REG,0X00); //关闭所有中断
MPU_Write_Byte(MPU_USER_CTRL_REG,0X00); //I2C主模式关闭
MPU_Write_Byte(MPU_FIFO_EN_REG,0X00); //关闭FIFO
MPU_Write_Byte(MPU_INTBP_CFG_REG,0X80); //INT引脚低电平有效
res=MPU_Read_Byte(MPU_DEVICE_ID_REG);
if(res==MPU_ADDR)//器件ID正确
{
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X01); //设置CLKSEL,PLL X轴为参考
MPU_Write_Byte(MPU_PWR_MGMT2_REG,0X00); //加速度与陀螺仪都工作
MPU_Set_Rate(50); //设置采样率为50Hz
}else return 1;
return 0;
}
3.角速度和加速度
//得到陀螺仪值(原始值)
//gx,gy,gz:陀螺仪x,y,z轴的原始读数(带符号)
//返回值:0,成功
// 其他,错误代码
u8 MPU_Get_Gyroscope(short *gx,short *gy,short *gz)
{
u8 buf[6],res;
res=MPU_Read_Len(MPU_ADDR,MPU_GYRO_XOUTH_REG,6,buf);
if(res==0)
{
*gx=((u16)buf[0]<<8)|buf[1];
*gy=((u16)buf[2]<<8)|buf[3];
*gz=((u16)buf[4]<<8)|buf[5];
}
return res;;
}
//得到加速度值(原始值)
//gx,gy,gz:陀螺仪x,y,z轴的原始读数(带符号)
//返回值:0,成功
// 其他,错误代码
u8 MPU_Get_Accelerometer(short *ax,short *ay,short *az)
{
u8 buf[6],res;
res=MPU_Read_Len(MPU_ADDR,MPU_ACCEL_XOUTH_REG,6,buf);
if(res==0)
{
*ax=((u16)buf[0]<<8)|buf[1];
*ay=((u16)buf[2]<<8)|buf[3];
*az=((u16)buf[4]<<8)|buf[5];
}
return res;;
}
4.i2c协议读取寄存器
紧贴部分代码
//IIC读一个字节
//reg:寄存器地址
//返回值:读到的数据
u8 MPU_Read_Byte(u8 reg)
{
u8 res;
MPU_IIC_Start();
MPU_IIC_Send_Byte((MPU_ADDR<<1)|0);//发送器件地址+写命令
MPU_IIC_Wait_Ack(); //等待应答
MPU_IIC_Send_Byte(reg); //写寄存器地址
MPU_IIC_Wait_Ack(); //等待应答
MPU_IIC_Start();
MPU_IIC_Send_Byte((MPU_ADDR<<1)|1);//发送器件地址+读命令
MPU_IIC_Wait_Ack(); //等待应答
res=MPU_IIC_Read_Byte(0);//读取数据,发送nACK
MPU_IIC_Stop(); //产生一个停止条件
return res;
}
二、参数意义,算法,计算
前面说过六轴”分别为加速度xyz轴,角速度xyz轴
其中通过他们可以返回
俯仰角(车头绕Y轴翘起角度),
航向角(车身绕Z轴旋转角度),
翻滚角(侧轮绕X轴抬起角度)。














 4756
4756











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









