







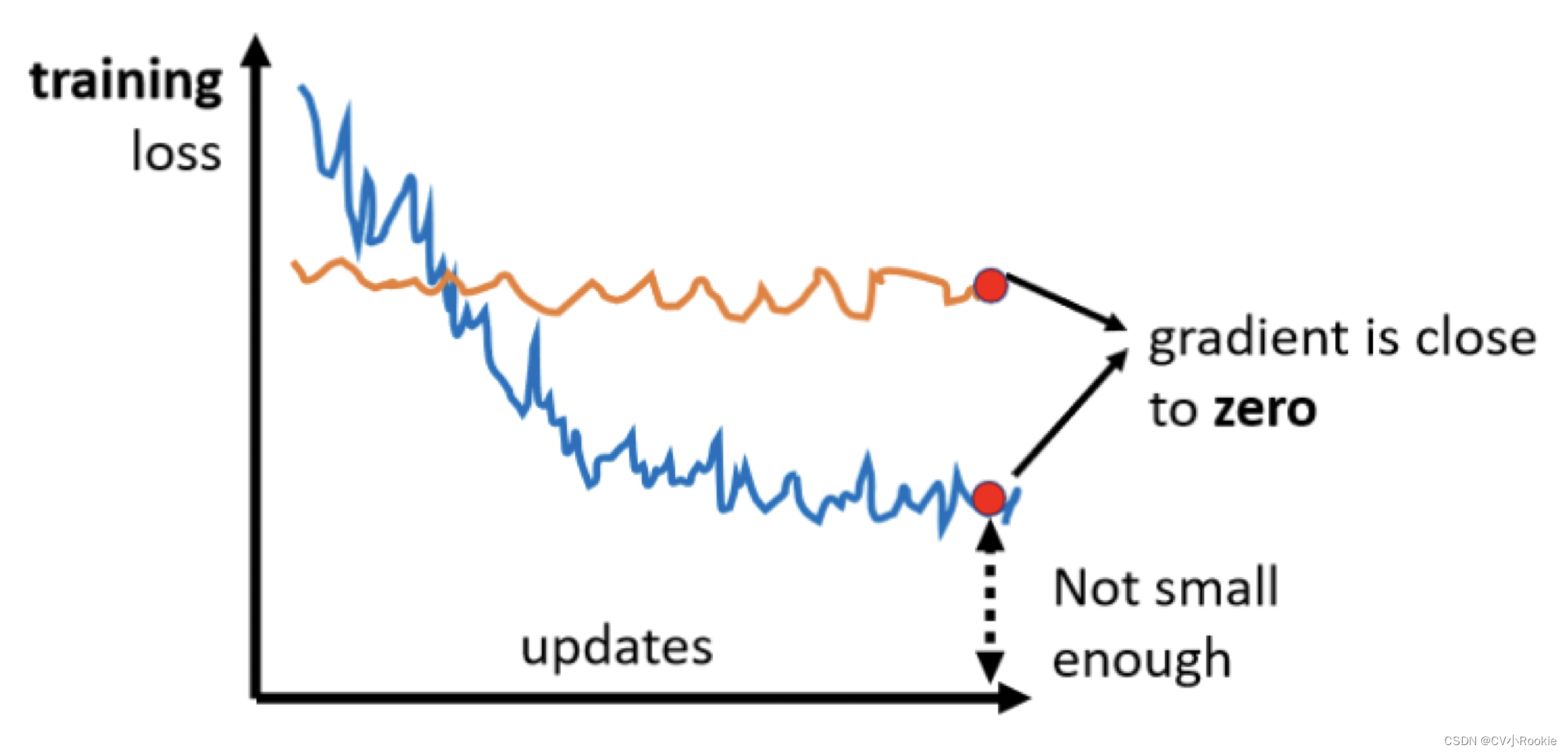
当我们训练模型的时候,随著参数不断的 update,training 的 loss 不会再下降,但这时候的 loss 还没有到我们希望看到的样子,那很有可能是 deep network,没有发挥它完整的力量,所以 Optimization 显然是有问题的。
但是不管我们怎么 train 我们的模型,loss 迟迟不下降,就会猜想可能 loss 在下降的过程中遇到了微分为 0 的点,卡住了。每到这时,大家总会说这是 local minima 局部最小点,但是除了 local minima 以外,saddle point 鞍点也可能会造成微分为 0 。把梯度为 0 的点,我们统称 Critical Point 。
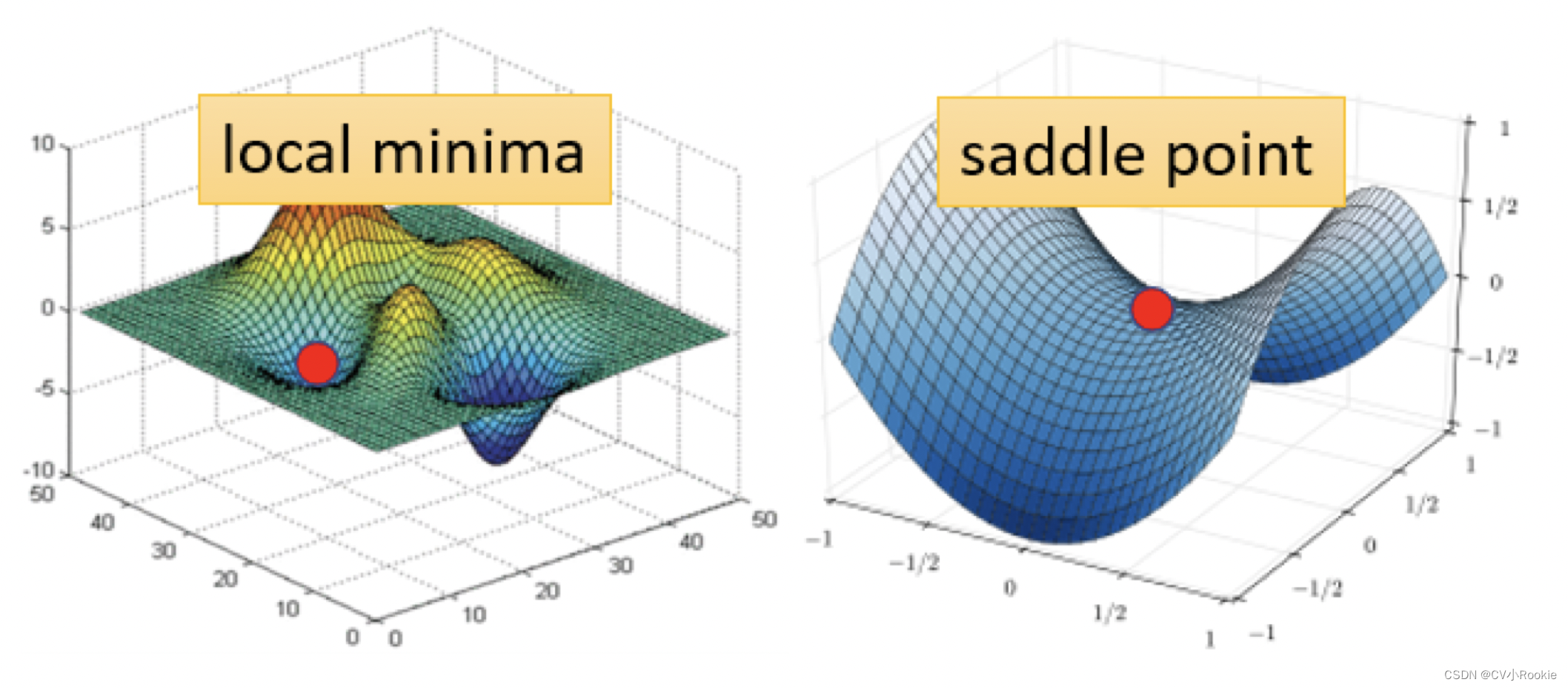
对于 local minima 和 saddle point 来说,虽然同样都是梯度为 0 ,但是:
- 因為如果是卡在local minima,那可能就没有路可以走了,因為四周都比较高,你现在所在的位置已经是 loss 最低的点,四周的 loss 都会比较高。
- 如果今天是卡在 saddle point 的话,saddle point 旁边还是有路可以让 loss 更低的。
所以鉴别今天我们走到 critical point 的时候,到底是 local minima 还是 saddle point 是一个值得去探讨的问题。
如果我们知道了 loss function 的形状,像上面那个图一样,我们就可以轻易看出是哪种类型。但是 deep learning 是非常复杂的,参数的维数是几百万甚至上亿,我们就没有办法画出 loss 的形状。
我们根据泰勒展开式,如果给定一个点 ,那在
附近的函数是可以写出来的:

- 第一项
说明当
与
比较接近时,
。
- 第二项
,用绿色的这个 g 来代表 gradient ,这个gradient会来弥补
- 第三项
是弥补加上 gradient 后,和真实
的差距,H 是 Hessian矩阵。

如果我们今天走到的一个 critical point ,那么 gradient 为 0 ,第二项就消失了。所以我们可以通过判断 来区分 local minima 还是 saddle point 。
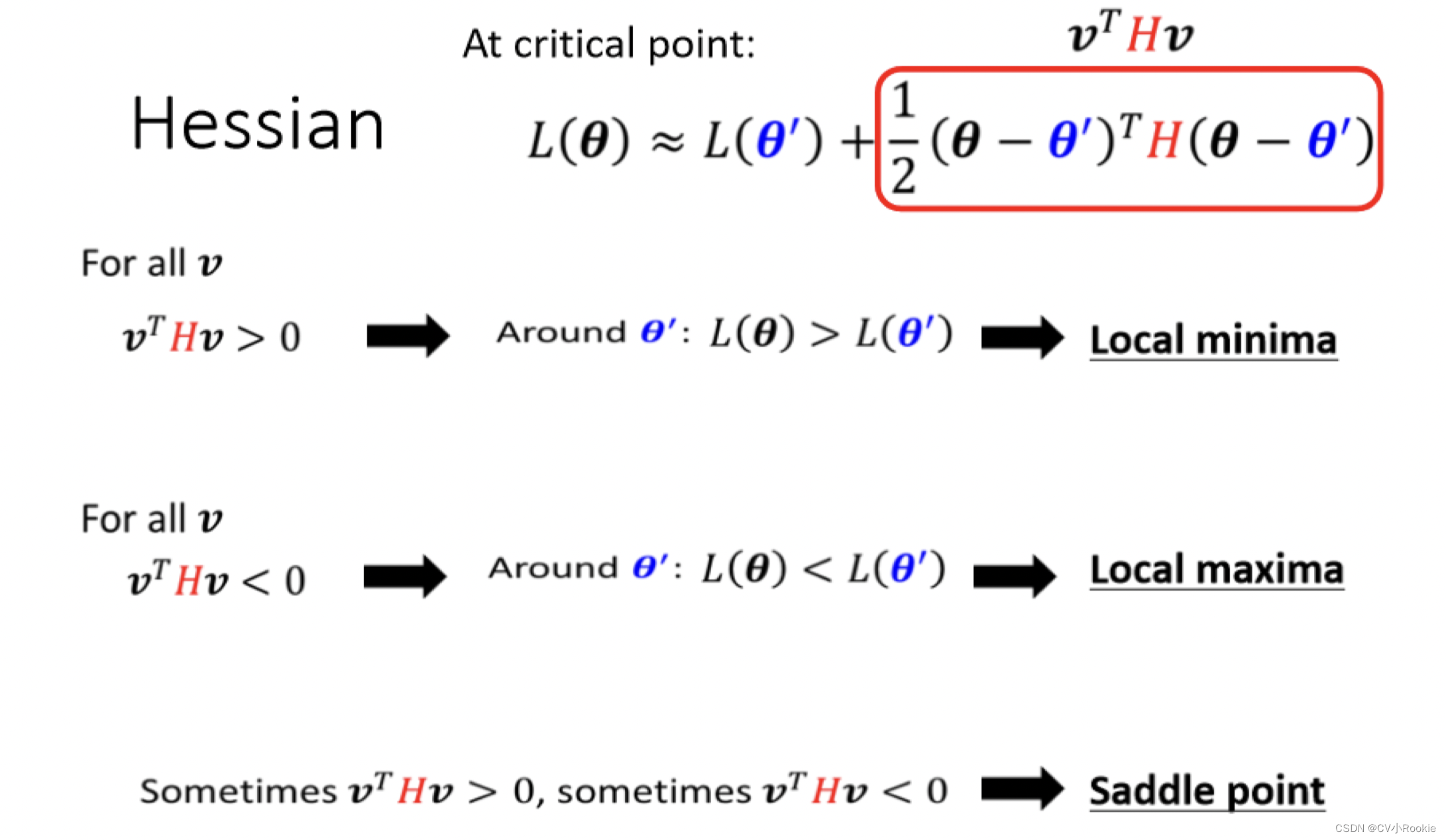
其实《最优化》中也学过这个,通过判断 Hessian 矩阵正定 -> 极小值(local minima);负定 -> 极大值;不定 -> 非极值点(saddle point)。
当然计算 H 的开销是非常昂贵的,这里我们只需要看其特征值,特征值全正就是 local minima;特征值全负就是 local maxima;特征值有正有负就是 saddle point 。
那 saddle point 不一样也会让训练停止,就算搞清楚是哪种 critical point 有什么意义?不用担心,其实 Hessian 矩阵暗指了 update 的方向。
这里 代表 H 的特征向量,
代表
对应的特征值,就有:
,当
为负时,这一项整体为负。假如
,那么就会有
。这样我们就可以说当遇到 saddle point 时,只需要沿着特征值为负的特征向量方向 update 就可以让 loss 降低。
那实际情况中 saddle point 多还是 local minima 多呢?先说结论,local minima 更少!举例:当处于一维空间中,或许处处是 local minima ,但是如果当参数变成两个,二维情况下或许原本的 local minima 就变成了 saddle point 。
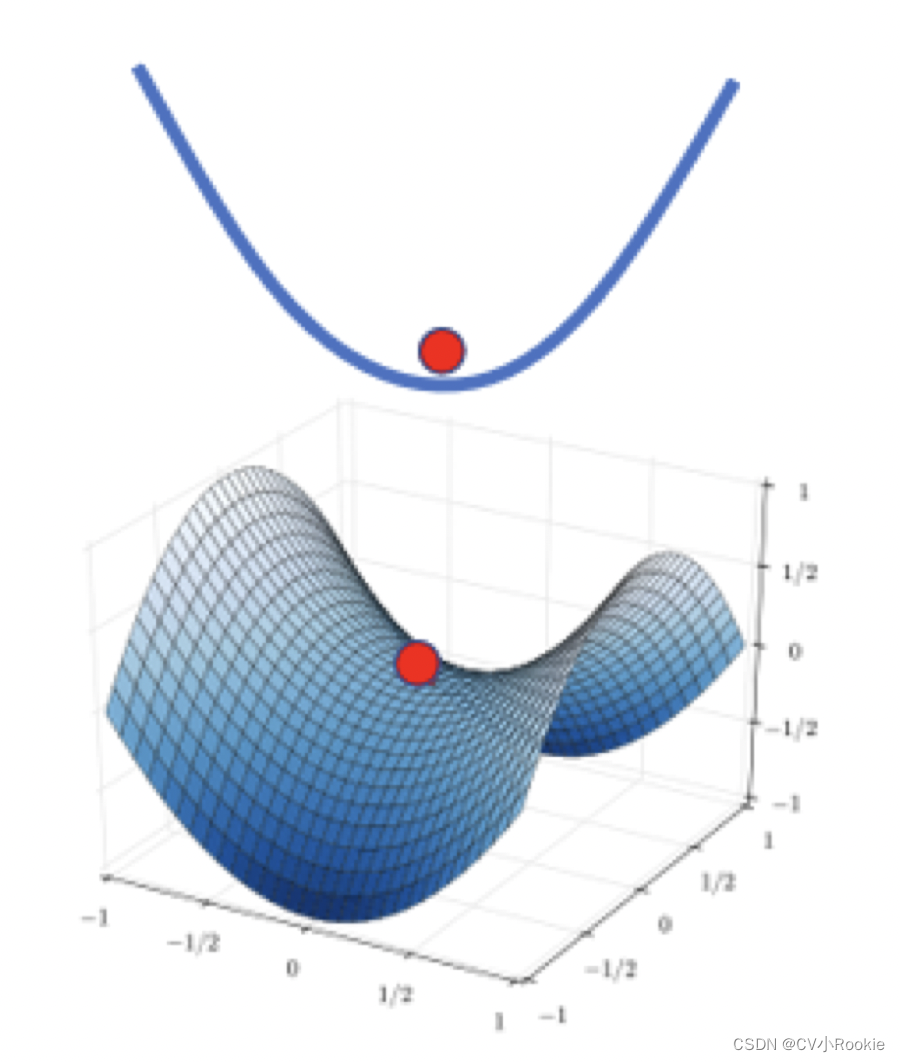
由于我们现在网络的参数都是百万千万级别的,所以 local minima 真的很少见! 看图说话。
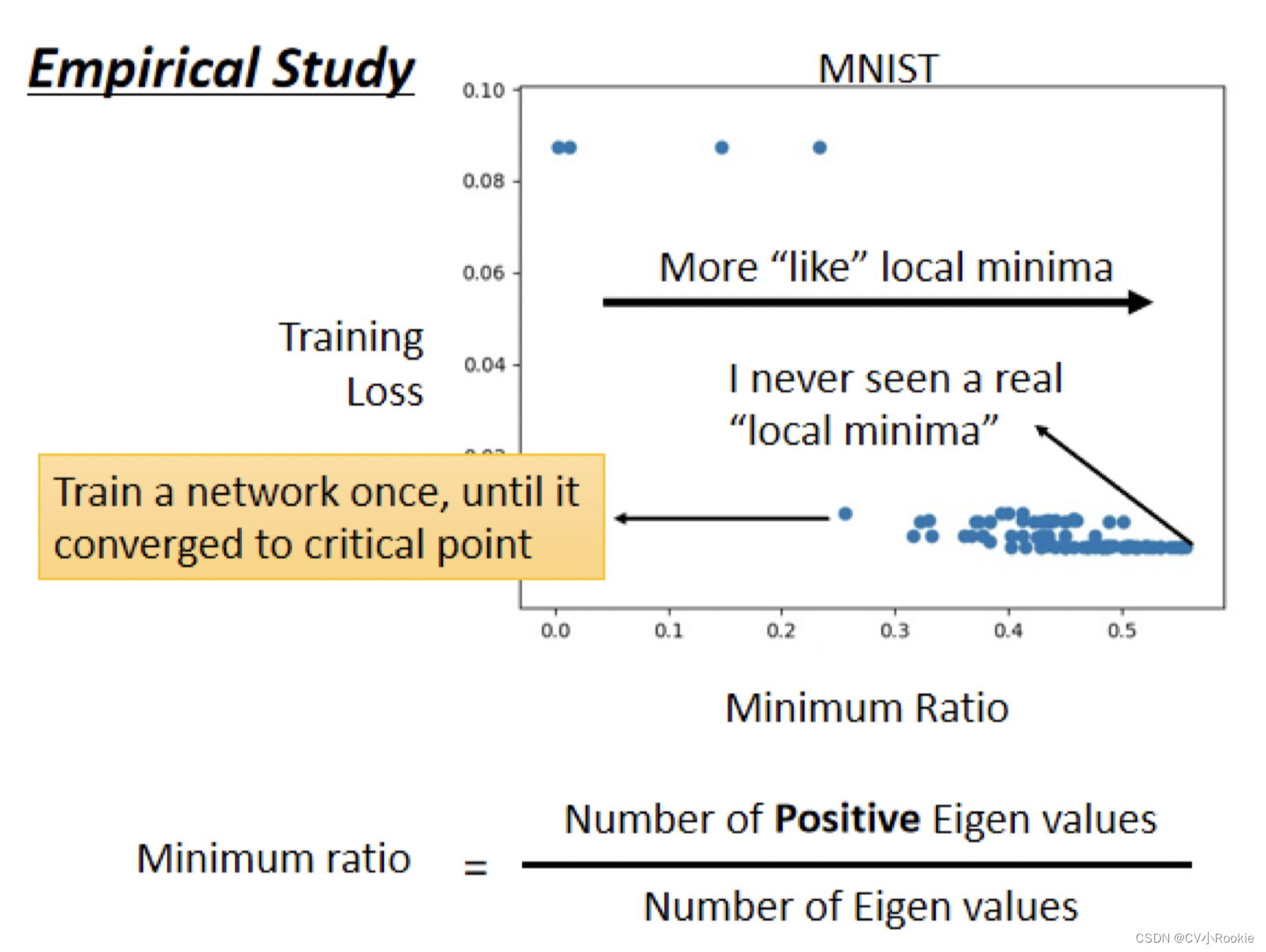
横轴的部分是 minimum ratio,是正的 eigen value 的数目和所有 eigen value 的数目之比。 如果所有的 eigen value 都是正的,代表我们今天的 critical point 是 local minima 。如果有正有负代表 saddle point, 那在实际上会发现说,几乎找不到完全所有 eigen value 都是正的 critical point。这个例子中 minimum ratio 最大也不过 0.5 到 0.6 间而已,代表说只有一半的 eigen value 是正的,还有一半的 eigen value 是负的。
所以从经验上看起来,其实 local minima 并没有那么常见。多数时候觉得 train 到一个地方 gradient 真的很小,然后所以参数不再update,往往是因为卡在了一个 saddle point 。

















 1394
1394

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









