







sobel算子主要用于获得数字图像的一阶梯度,常见的应用和物理意义是边缘检测。
原理
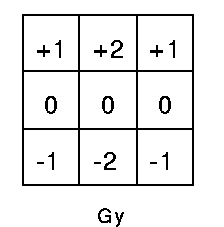
算子使用两个33的矩阵(图1)算子使用两个33的矩阵(图1)去和原始图片作卷积,分别得到横向G(x)和纵向G(y)的梯度值,如果梯度值大于某一个阈值,则认为该点为边缘点
Gx方向的相关模板:

Gy方向的相关模板:

所以Sobel的卷积模板是:
Gx=
| 1 | 0 | -1 |
| 2 | 0 | -2 |
| 1 | 0 | -1 |
具体计算如下:
图像的每一个像素的横向及纵向灰度值通过以下公式结合,来计算该点灰度的大小:

通常,为了提高效率使用不开平方的近似值:

然后可用以下公式计算梯度方向:

opencv还提供了一个scharr函数,比Sobel算子更为精准,也是3x3的模板。

#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <iostream>
#include <cmath>
using namespace cv;
using namespace std;
bool sobelEdge(Mat& srcImage, Mat& resultImageX, Mat& resultImageY, uchar threshold)
{
CV_Assert(srcImage.channels() == 1);
// 初始化水平核因子
Mat sobelx = (Mat_<double>(3, 3) << -1, 0,
1, -2, 0, 2, -1, 0, 1);
// 初始化垂直核因子
Mat sobely = (Mat_<double>(3, 3) << -1, -2, -1,
0, 0, 0, 1, 2, 1);
resultImageX = Mat::zeros(srcImage.rows - 2,
srcImage.cols - 2, srcImage.type());
resultImageY = Mat::zeros(srcImage.rows - 2,
srcImage.cols - 2, srcImage.type());
double edgeX = 0;
double edgeY = 0;
double graMagX = 0;// 垂直方向上的梯度模长
double graMagY = 0;// 水平方向上的梯度模长
for (int k = 1; k < srcImage.rows - 1; ++k)
{
for (int n = 1; n < srcImage.cols - 1; ++n)
{
edgeX = 0;
edgeY = 0;
// 遍历计算水平与垂直梯度
for (int i = -1; i <= 1; ++i)
{
for (int j = -1; j <= 1; ++j)
{
edgeX += srcImage.at<uchar>(k + i, n + j) *
sobelx.at<double>(1 + i, 1 + j);
edgeY += srcImage.at<uchar>(k + i, n + j) *
sobely.at<double>(1 + i, 1 + j);
}
}
// 计算垂直方向上的梯度模长
graMagX = sqrt(pow(edgeX, 2));
// 计算水平方向上的梯度模长
graMagY = sqrt(pow(edgeY, 2));
// 二值化
resultImageX.at<uchar>(k - 1, n - 1) =
((graMagX > threshold) ? 255 : 0);
// 二值化
resultImageY.at<uchar>(k - 1, n - 1) =
((graMagY > threshold) ? 255 : 0);
}
}
return true;
}
int OTSU(Mat &srcImage)
{
int nRows = srcImage.rows;
int nCols = srcImage.cols;
int threshold = 0;
double max = 0.0;
double AvePix[256];
int nSumPix[256];
double nProDis[256];
double nSumProDis[256];
for (int i = 0; i < 256; i++)
{
AvePix[i] = 0.0;
nSumPix[i] = 0;
nProDis[i] = 0.0;
nSumProDis[i] = 0.0;
}
for (int i = 0; i < nRows; i++)
{
for (int j = 0; j < nCols; j++)
{
nSumPix[(int)srcImage.at<uchar>(i, j)]++;
}
}
for (int i = 0; i < 256; i++)
{
nProDis[i] = (double)nSumPix[i] / (nRows*nCols);
}
AvePix[0] = 0;
nSumProDis[0] = nProDis[0];
for (int i = 1; i < 256; i++)
{
nSumProDis[i] = nSumProDis[i - 1] + nProDis[i];
AvePix[i] = AvePix[i - 1] + i*nProDis[i];
}
double mean = AvePix[255];
for (int k = 1; k < 256; k++)
{
double PA = nSumProDis[k];
double PB = 1 - nSumProDis[k];
double value = 0.0;
if (fabs(PA) > 0.001 && fabs(PB) > 0.001)
{
double MA = AvePix[k];//前一半的平均
double MB = (mean - PA*MA) / PB;//后一半的平均
value = value = (double)(PA * PB * pow((MA - MB), 2));//类间方差
//或者这样value = (double)(PA * PB * pow((MA-MB),2));//类间方差
//pow(PA,1)* pow((MA - mean),2) + pow(PB,1)* pow((MB - mean),2)
if (value > max)
{
max = value;
threshold = k;
}
}
}
return threshold;
}
int main()
{
Mat srcImage = cv::imread("building.jpg");
if (!srcImage.data)
return -1;
Mat srcGray;
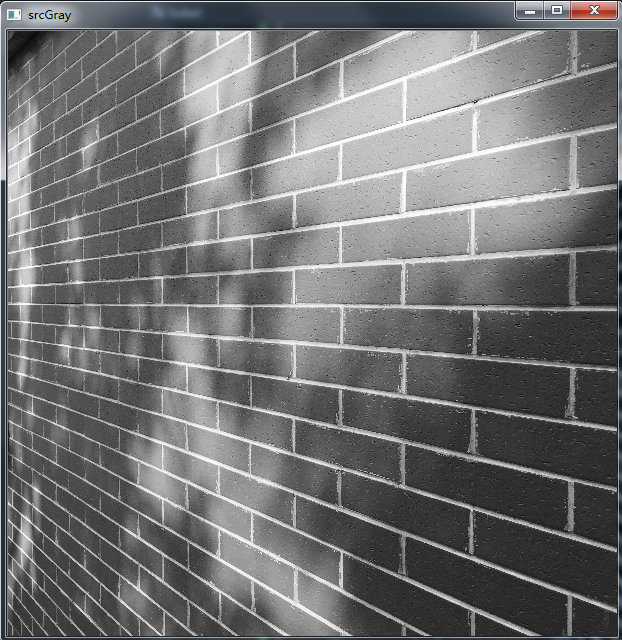
cvtColor(srcImage, srcGray, CV_BGR2GRAY);
imshow("srcGray", srcGray);
//调用二值化函数得到最佳阈值
int otsuThreshold = OTSU(srcGray);
cout << otsuThreshold << endl;
Mat XresultImage;
Mat YresultImage;
sobelEdge(srcGray, XresultImage, YresultImage, otsuThreshold);
Mat resultImage;
//水平垂直边缘叠加
addWeighted(XresultImage, 0.5, YresultImage, 0.5, 0.0, resultImage);
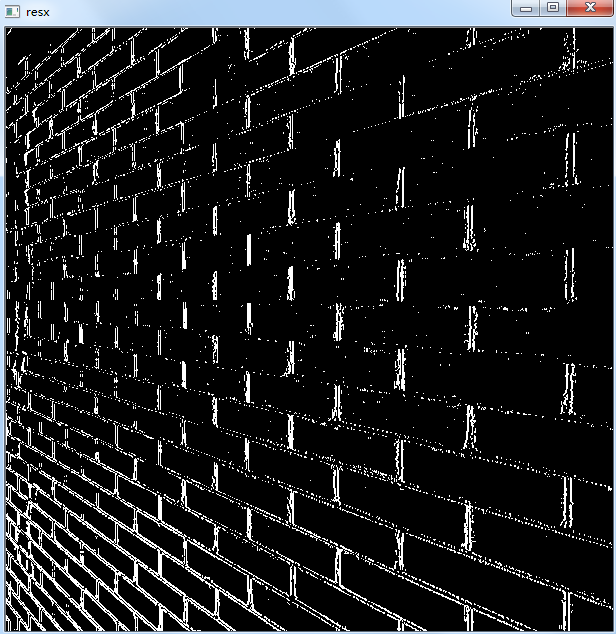
imshow("resx", XresultImage);
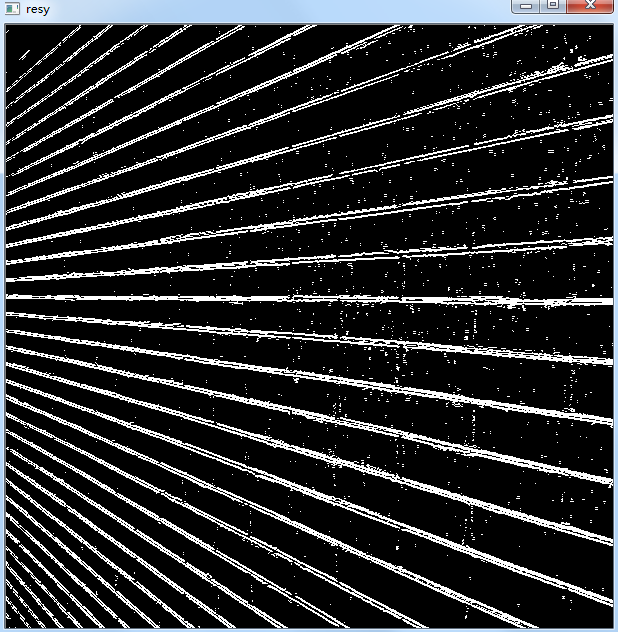
imshow("resy", YresultImage);
imshow("res", resultImage);
waitKey(0);
return 0;
}
垂直边缘图像:
水平边缘图像:
水平垂直合一起:
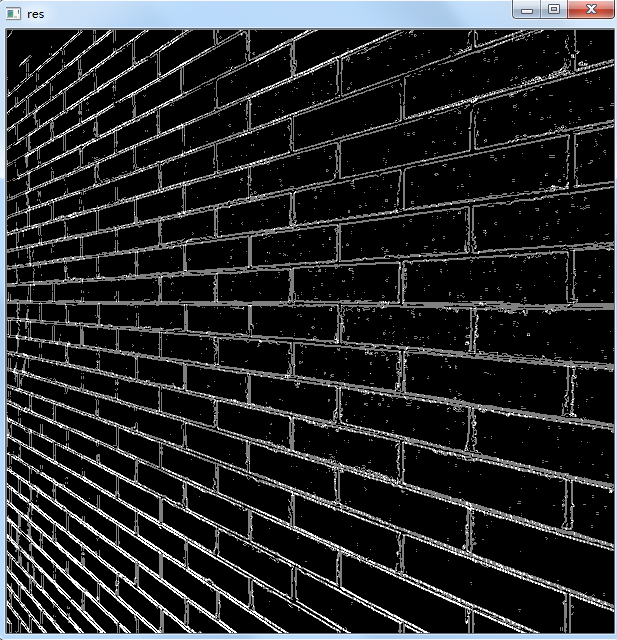
从上图可以看出 边缘图还有很多不是边缘点的也被取出来了,下一步就是做非极大值抑制

















 5万+
5万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









