







首先介绍一下我的算法思路:
- 先用傅里叶变换求出频域的图像
- 利用霍夫直线变换求出里面的直线的旋转角度
- 根据倾斜角旋转矫正
然后给出OpenCV的实现算法:
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <iostream>
using namespace cv;
using namespace std;
//傅里叶变化模块
Mat DFT(Mat srcImage)
{
//1.转换位灰度图
Mat srcGray;
cvtColor(srcImage, srcGray, CV_BGR2GRAY);
//2.将输入图像延扩到最佳的尺寸,边界用0填充
int nRows = getOptimalDFTSize(srcGray.rows);
int nCols = getOptimalDFTSize(srcGray.cols);
Mat padded;
//BORDER_CONSTANT是填充是常数的意思,填充的数是后面的0
copyMakeBorder(srcGray, padded, 0, nRows - srcGray.rows, 0, nCols - srcGray.cols, BORDER_CONSTANT, Scalar::all(0));
//3.为傅里叶变换的结果(实部与虚部)分别存储空间
Mat planes[] = { Mat_<float>(padded),Mat::zeros(padded.size(),CV_32F) };
Mat complexI;
//将planes数组组合合并成一个多通道的数组complexI
merge(planes, 2, complexI);//将两个数组合并成一个多通道的数组
//4.进行离散傅里叶变换
dft(complexI, complexI);
//5.将复数转化为幅值
// planes[0] = Re(DFT(I), planes[1] = Im(DFT(I)
split(complexI, planes);//将多通道数组complexI分解为几个单通道的数组
//magnitude(x,y,dst);dst=sqrt(x(I)^2+y(I)^2);
magnitude(planes[0], planes[1], planes[0]);
Mat magnitudeImage = planes[0];//傅里叶变换的幅值矩阵
//6.进行对数尺度缩放
magnitudeImage += Scalar::all(1);//对幅值都加1
log(magnitudeImage, magnitudeImage);
//归一化,用0到1之间的浮点值将矩阵变换为可视的图像格式
normalize(magnitudeImage, magnitudeImage, 0, 1, CV_MINMAX);
//图像类型转换,为了下一步的霍夫直线检测做准备
magnitudeImage.convertTo(magnitudeImage, CV_8UC1, 255, 0);
//7.剪切与重分布幅度图象限
//若有奇数行或者奇数列,进行频谱裁剪
magnitudeImage = magnitudeImage(Rect(0, 0, magnitudeImage.cols & -2, magnitudeImage.rows & -2));
//重新排列傅里叶图像中的象限,使得原点位于图像中心
int cx = magnitudeImage.cols / 2;
int cy = magnitudeImage.rows / 2;
Mat q0(magnitudeImage, Rect(0, 0, cx, cy));//ROI区域的左上
Mat q1(magnitudeImage, Rect(cx, 0, cx, cy));//ROI区域的右上
Mat q2(magnitudeImage, Rect(0, cy, cx, cy));//ROI区域的左下
Mat q3(magnitudeImage, Rect(cx, cy, cx, cy));//ROI区域的右上
//交换象限(左上与右下进行交换)
Mat temp;
q0.copyTo(temp);
q3.copyTo(q0);
temp.copyTo(q3);
//交换象限(右上与左下进行交换)
q1.copyTo(temp);
q2.copyTo(q1);
temp.copyTo(q2);
return magnitudeImage;
}
//倾斜角检测 返回检测到的倾斜角
float AngleDetection(Mat srcImage)
{
int nRows = srcImage.rows;
int nCols = srcImage.cols;
Mat binaryMat;
//对傅里叶变换之后的图像进行二值化处理
threshold(srcImage, binaryMat, 132, 255, CV_THRESH_BINARY);
imshow("binaryMat", binaryMat);//显示二值图像
//霍夫变换
vector<Vec2f> lines;
binaryMat.convertTo(binaryMat, CV_8UC1, 255, 0);
HoughLines(binaryMat, lines, 1, CV_PI / 180, 100, 0, 0);
//检测线的个数
cout <<"lines.size:"<<lines.size() << endl;
//创建一张直线检测图形
Mat houghMat(binaryMat.size(), CV_8UC3);
//绘制线检测
for (size_t i = 0; i < lines.size(); i++)
{
//根据直线参数表达式绘制相应的检测结果
float rho = lines[i][0], theta = lines[i][1];
Point pt1, pt2;
double a = cos(theta), b = sin(theta);
double x0 = a*rho, y0 = b*rho;
pt1.x = cvRound(x0 + 1000 * (-b));
pt1.y = cvRound(y0 + 1000 * (a));
pt2.x = cvRound(x0 - 1000 * (-b));
pt2.y = cvRound(y0 - 1000 * (a));
line(houghMat, pt1, pt2, Scalar(255, 0, 0), 3, CV_AA);
}
//显示绘制的图
imshow("houghMat", houghMat);
float theta2 = 0;
//检测线角度判断
//因为文本检测的时候有三条直线,一条水平,一条垂直,还有一条就是我们需要的直线
for (size_t i = 0; i < lines.size(); i++)
{
float ThetaTemp = lines[i][1] * 180 / CV_PI;
//找出我们需要的那条直线就退出循环
if (ThetaTemp > 0 && ThetaTemp < 90)
{
theta2 = ThetaTemp;
break;
}
}
//角度转换
float angelT = nRows*tan(theta2 / 180 * CV_PI) / nCols;
theta2 = atan(angelT) * 180 / CV_PI;
cout << "theta2:" << theta2 << endl;
return theta2;
}
//旋转图像
Mat RotIamge(Mat &srcImage, float Angle) //旋转角度然后返回一张旋转后的图像
{
//以图像的中心为原点求出原图中的四个角的坐标
float SrcX1, SrcY1, SrcX2, SrcY2, SrcX3, SrcY3, SrcX4, SrcY4;
//新图中四个角的坐标
float DstX1, DstY1, DstX2, DstY2, DstX3, DstY3, DstX4, DstY4;
//将角度转换位弧度
float alpha = Angle*CV_PI / 180;
//原图的宽高
int Wold = srcImage.cols;
int Hold = srcImage.rows;
//假设原图的原点在原图的中心主要是为了求出新图的宽高
//原图的四个角的坐标
SrcX1 = (float)((-0.5)*Wold);
SrcY1 = (float)((0.5)*Hold);
SrcX2 = (float)((0.5)*Wold);
SrcY2 = (float)((0.5)*Hold);
SrcX3 = (float)((-0.5)*Wold);
SrcY3 = (float)((-0.5)*Hold);
SrcX4 = (float)((0.5)*Wold);
SrcY4 = (float)((-0.5)*Hold);
//求出cosa 和sina
float cosa = cos(alpha);
float sina = sin(alpha);
//求出新图的四个角的坐标
DstX1 = cosa*SrcX1 + sina*SrcY1;
DstY1 = -sina*SrcX1 + cosa*SrcY1;
DstX2 = cosa*SrcX2 + sina*SrcY2;
DstY2 = -sina*SrcX2 + cosa*SrcY2;
DstX3 = cosa*SrcX3 + sina*SrcY3;
DstY3 = -sina*SrcX3 + cosa*SrcY3;
DstX4 = cosa*SrcX4 + sina*SrcY4;
DstY4 = -sina*SrcX4 + cosa*SrcY4;
//计算新图的宽和高
int Wnew = cvRound(max(abs(DstX4 - DstX1), abs(DstX3 - DstX2)));
int Hnew = cvRound(max(abs(DstY4 - DstY1), abs(DstY3 - DstY2)));
//计算矩阵中的两个常数
float num1 = (float)(-0.5*Wnew*cosa - 0.5*Hnew*sina + 0.5*Wold);
float num2 = (float)(0.5*Wnew*sina - 0.5*Hnew*cosa + 0.5*Hold);
//创建一张新的大小的图
Mat resultImage(Hnew, Wnew, srcImage.type());
for (int i = 0; i < Hnew; i++) //rows
{
for (int j = 0; j < Wnew; j++)//cols
{
//求出新图中的像素在原图的位置
int x = cvRound(i*cosa + j*sina + num1);
int y = cvRound(-sina*i + j*cosa + num2);
if ((x >= 0) && (x < Wold) && (y >= 0) && (y < Hold))//在原图中的范围
{
resultImage.at<Vec3b>(i, j) = srcImage.at<Vec3b>(x, y);
}
}
}
return resultImage;
}
int main()
{
Mat srcImage = imread("text.jpg");
if (!srcImage.data)
{
printf("could not load image...\n");
return -1;
}
imshow("srcImage", srcImage);
//输出傅里叶变换之后的图形
Mat DFTImage = DFT(srcImage);
imshow("DFT", DFTImage);
//求出傅里叶变换里面的倾斜角
float theta = AngleDetection(DFTImage);
Mat retultImage=RotIamge(srcImage, theta);
imshow("res", retultImage);
waitKey(0);
return 0;
}下面给出原图和效果图:
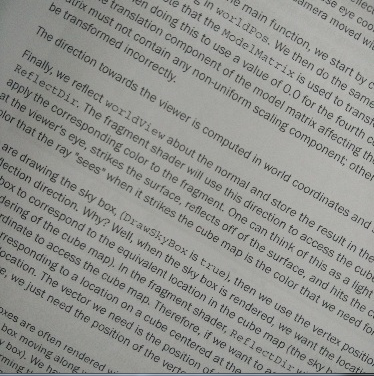
原图:
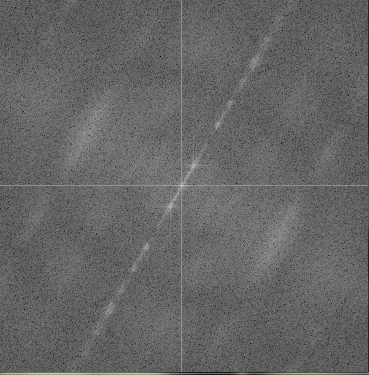
傅里叶变化图:
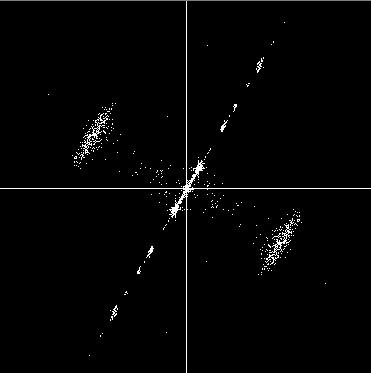
傅里叶变换的二值图像图:
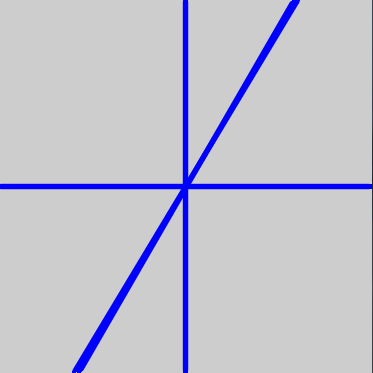
霍夫直线检测图:
最后的效果图:
这个小小的案例也算是对前期的一个总结吧!希望自己更加的加把劲好好学习!

















 1801
1801

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









