








 超级会员免费看
超级会员免费看

 本文介绍了如何使用PCL库在C++中实现点云的平移和旋转功能,包括平移和旋转的算法原理,4x4变换矩阵的应用,以及在实际操作中的注意事项。
本文介绍了如何使用PCL库在C++中实现点云的平移和旋转功能,包括平移和旋转的算法原理,4x4变换矩阵的应用,以及在实际操作中的注意事项。
0.实现效果
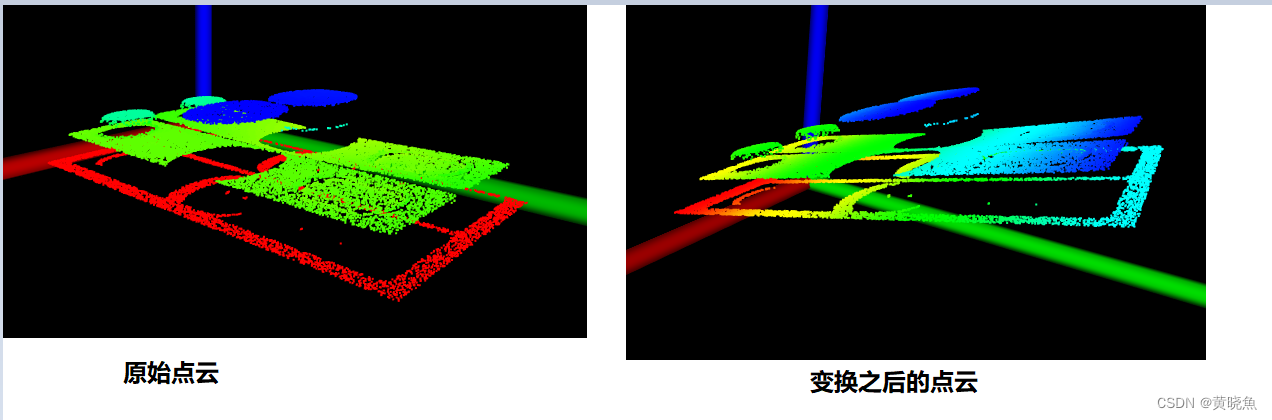
在点云处理中,对点云的平移,缩放,旋转等功能是基础中的基础,对点云进行坐标变换就是对点云的每一个点进行坐标变换。
1.算法原理
PCL(Point Cloud Library)提供了对点云进行平移和旋转的功能。以下是使用PCL对点云进行平移和旋转的基本步骤和原理:
平移
点云平移是将点云中的每个点沿着指定的方向进行移动,实现整体位置的变换。在PCL中,可以通过创建一个4x4的变换矩阵(通常是Eigen::Affine3f或Eigen::Matrix4f类型),将点云中的每个点与该矩阵相乘,从而实现平移操作。
平移矩阵通常具有如下形式:
| 1 0 0 tx |
| 0 1 0 ty |
| 0 0 1 tz |
| 0 0 0 1 |其中,(tx, ty, tz)是平移向量,表示在x、y、z轴上的平移距离。
旋转
点云的旋转也是通过4x4的变换矩阵实现的。旋转矩阵可以绕x、y、z轴分别进

 订阅专栏 解锁全文
订阅专栏 解锁全文




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











