








 超级会员免费看
超级会员免费看

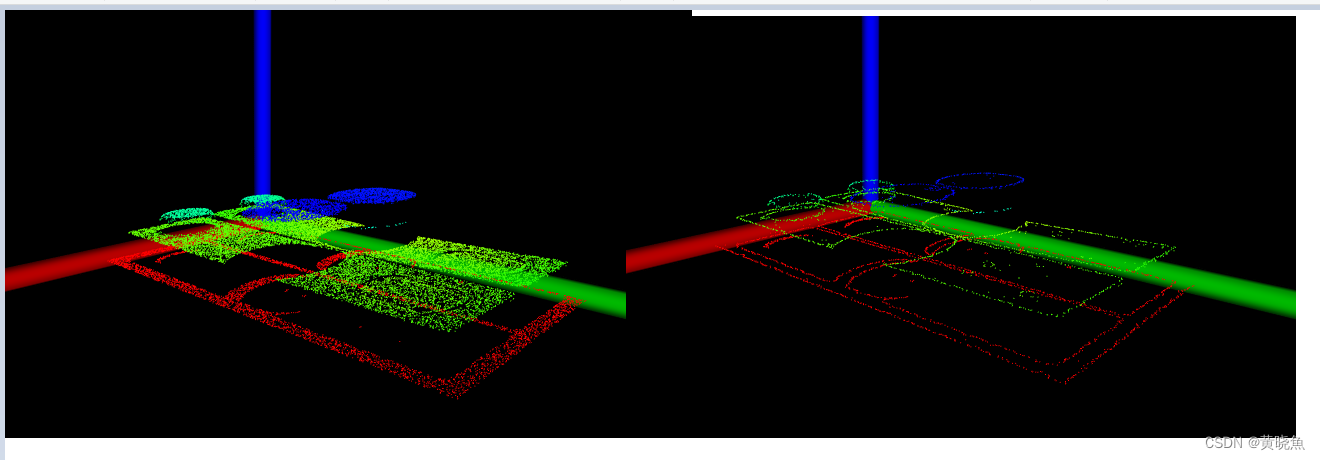
0.实现效果
1.算法原理
PCL(Point Cloud Library)中获取点云边界的算法主要基于点云数据的几何特征和法向量信息。以下是对该算法的详细解释,按照清晰的格式进行归纳:
算法概述
PCL中的点云边界提取算法主要用于从3D点云数据中识别并提取出位于物体边界上的点。这些边界点通常位于物体的最外围,周围的点大多位于边界点的同一侧。
算法流程
- 加载点云数据:首先,算法需要加载待处理的点云数据。这通常通过PCL提供的文件I/O功能实现,例如使用loadPCDFile函数从PCD或PLY等文件格式中读取点云数据。
- 计算法向量:对于点云中的每个点,算法需要计算其法向量。法向量描述了该点处表面的方向,对于边界提取至关重要。PCL提供了多种法向量估计算法,可以根据具体需求选择。
- 计算边界特征:接下来,算法使用边界特征估计算法来计算点云中每个点的边界特征。这通常基于点的法向量和邻域点的几何关系进行。例如,可以使用pcl::BoundaryEstimation类来实现这一过程。
- 提取边界点:根据计算得到的边界特征,算法遍历点云中的每个点,将满足边界条件的点提取出来。这些点通常位于物体的最外围,且周围的点大多位于同一侧。
- 可视化展示(可选):为了直观地展示边界提取结果,算法可以将原始点云和提取出的边界点云进行可视化展示。这可以通过PCL的可视化工具

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











