






摘抄“GPU Programming And Cg Language Primer 1rd Edition” 中文 名“GPU编程与CG语言之阳春白雪下里巴人”
Sh adows are created by testing whether a pixel is visible from the light source, by comparing it to a z-buffer or depth image of the light source's view, stored in the form of a texture .
Shadow Map 是一种基于深度图(depth map )的阴影生成方法,由 Lance Williams 于1978 年在文章“ Casting curved shadows on curved surfaces ”中首次提出。该方法的主要思想是:在第一遍渲染场景时,将场景的深度信息存放在纹理图片上,这个纹理图片称为深度图;然后在第二次渲染场景时,将深度图中的信息 length1取出,和当前顶点与光源的距离length2 做比较,如果length1 小于length2 ,则说明当前顶点被遮挡处于阴影区,然后在片段着色程序中,将该顶点设置为阴影颜色。
13.1 什么是 depth map
深度图是一张 2D 图片,每个像素都记录了从光源到遮挡物(遮挡物就是阴影生成物体)的距离,并且这些像素对应的顶点对于光源而言是 “ 可见的 ” 。这里的 “ 可见 ” 像素是指,以光源为观察点,光的方向为观察方向,设置观察矩阵并渲染所有遮挡物,最终出现在渲染表面上的像素。
Depth map 中像素点记录的深度值记为lenth1
;然后从视点的出发,计算物体顶点V
到光源的距离,记为length2
;比较
length1与length2
的大小,如果
length2>length1,则说明顶点
所对应的 depth texure 上的像素点记录的深度值,并不是V
到光源的距离,而是
V和光源中间某个点到光源的距离,这意味着 “V
被遮挡 ” 。
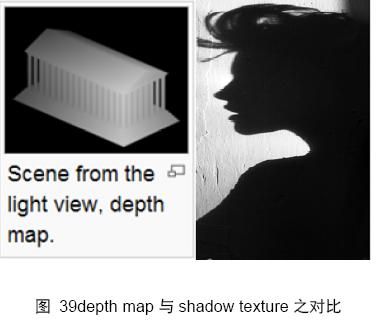
在一些教程中,往往将 depth map 翻译成阴影贴图( shdaow texture ),这实在是一个误解,不光误解了两个名称,也混淆了 2 种阴影算法。阴影贴图的英文为 Shadow texture ,就是将日常所见的阴影保存为纹理图片; Depth texture 保存的是 “ 从视点到物体顶点的距离,通常称为深度值 ” 。 图 39 左边的子图来自 wikipid 上 shadow map 网页,请注意,下面表述为 depth map ;右边的子图则是一张普通的 shadow texture 。
此外, Shadow texture 不但表示阴影贴图,也代表了一种阴影渲染方法,其实就是将阴影贴图作为纹理投影到物体上,投影的方法采用前面所讲述的 texture projective 方法。
13.2 Shadow map 与 shadow texture 的区别
在很多中文资料中,论述 Shadow ma p 技术时,容易将 Shadow map 与 shadow texture 这两个不同的概念混淆;
在英文中 map 有映射和图片的双重含义在内, shadow map 技术称为“ shadow map ”在英文中应该是准确的。中文翻译 shadow map 为阴影图,例如“实时计算机图形学第二版153 页,第6.12.4 节便将 shadow map 翻译为阴影图”,这种翻译已经是既成事实,那么我们也延续这种翻译方式。但是一定要知道“阴影图”和 shadow texture 所谓的阴影贴图是完全不同的两个概念。 Shadow map 以 depth map 为技术基础,通过比较“光源可见点到光源的深度”和“任何点到光源的深度”来判断点是否被物体遮挡;而 shadow texture 技术,将生成的阴影图形作为投影纹理来处理,也就是将一张阴影图投影映射到一个物体上(阴影接收体)。这种方法的缺点在于:设计者必须确认哪个物体是遮挡物,哪个物体是阴影接受体,并且不能产生自阴影现象(将一个物体的阴影贴图贴到物体身上,这是多么怪异)。
13.3 Shadow map 原理与实现流程
使用 Shadow Map 技术渲染阴影主要分两个过程:生成 depth map ( 深度图) 和使用 depth map 进行阴影渲染。
生成 depth map 的流程为:
1. 以光源所在位置为相机位置, 光线发射方向为观察方向进行相机参数设置;
2. 将世界视点投影矩阵 worldViewProjMatrix 传入顶点着色程序中,并在其中计算每个点的投影坐标,投影坐标的Z 值即为深度值(将Z 值保存为深度值只是很多方法中的一种)。在片段 shadow 程序中将深度值进行归一化,即转化到【0 ,1 】区间。然后将深度值赋给颜色值( Cg 最的颜色值范围在0-1 之间)。
这里有一点要留心: depth map 中保存的 深度值到底是什么?很多文献都将 depth map 深度值解释成 Z Buffer 中的 Z 值,我对这种解释一直持怀疑态度!并不是说这种解释不对,而是指 “ 这种解释有以偏概全的嫌疑 ” 。我们通常所说的距离是指笛卡尔坐标空间中的欧几里得距离( Euclidean distance ), Z 值本身并不是这个距离(参阅第 2.4.2 节),此外我在研究 GPU 算法的过程中,看到的关于 depth map 中保存的 深度值的计算方法远不止一种,有些直接计算顶点到视点的距离,然后归一化 到【 0 , 1 】空间,同样可以有效的用于深度比较。由此可见, depth map 中保存的深度值,是衡量 “ 顶点到视点的距离 ” 相对关系的数据,计算深度值的重点在于 “ 保证距离间相对关系的正确性 ” ,至于采用什么样的计算方法倒在其次。
3. 从 frame buffer 中读取颜色值,并渲染到一张纹理上,就得到了 depth map 。注意:在实际运用中,如果遇到动态光影,则 depth map 通常是实时计算的,这就需要场景渲染两次,第一次渲染出 depth map ,然后基于 depth map 做阴影渲染。渲染 depth map 的顶点着色程序和 片段着色程序分别 为:
代码 18 渲染 depth map 的顶点着色程序
void main_v(float4 position : POSITION,
out float4 oPosition : POSITION,
out float2 depth : TEXCOORD0,
uniform float4x4 worldViewProj )
{
oPosition = mul(worldViewProj, position);
// 存放深度值
depth.x = oPosition.z;
depth.y = oPosition.w;
}
代码 19 渲染 depth map 的片段着色程序
void main_f(float2 depth : TEXCOORD0,
out float4 result : COLOR,
uniform float pNear ,
uniform float pFar,
uniform float depthOffset )
{
float depthNum = 0.0;
// 归一化到 0-1 空间
depthNum = (depth.x - pNear) / (pFar - pNear);
depthNum += depthOffset;
result.xyz = depthNum.xxx;
result.w = 1.0;
}
在 代码 19 的片段着色程序中,有一个外部输入变量 depthOffset ,该变量表示深度值的偏移量,这时因为:将深度值写入纹理颜色,会导致数据精度的损失,所以需要加上一个深度偏移量。这个偏移量自己设定,通常是 0.01 之类的微小数据。
使用depth map 进行阴影渲染的流程为:
1. 将纹理投影矩阵传入顶点着色程序中。注意,这个纹理投影矩阵,实际上就是产生深度图时所使用的worldViewProjMatrix 矩阵乘上偏移矩阵(具体参见第13 章),根据纹理投影矩阵,和模型空间的顶点坐标,计算投影纹理坐标和当前顶点距离光源的深度值length2 (深度值的计算方法要和渲染深度图时的方法保持一致)。
2. 将depth map 传入片段着色程序中,并 根据计算好的投影纹理坐标,从中获取颜色信息,该颜色信息就是深度图中保存的深度值 lenght1。
3. 比较两个深度值的大小, 若 length2大于length1 ,则当前片断在阴影中;否则当前片断受光照射。 顶点着色程序和片段着色程序如下所示:
代码 20 使用 depth map 进行阴影渲染的顶点着色程序
void main_v(float4 position : POSITION,
float4 normal : NORMAL,
float2 tex : TEXCOORD,
out float4 outPos : POSITION,
out float4 outShadowUV : TEXCOORD0,
uniform float4x4 worldMatrix,
uniform float4x4 worldViewProj,
uniform float4x4 texViewProj)
{
outPos = mul(worldViewProj, position);
float4 worldPos = mul(worldMatrix, position);
// 计算投影纹理坐标
outShadowUV = mul(texViewProj, worldPos);
}
代码 21 使用 depth map 进行阴影渲染的片段着色程序
void main_f(float4 position : POSITION,
float4 shadowUV : TEXCOORD0,
out float4 result : COLOR
uniform sampler2D shadowMap ,
uniform float pNear ,
uniform float pFar,
uniform float depthOffset,
uniform int pixelOffset)
{
// 计算当前顶点和光源之间的距离(相对)
float lightDistance = (shadowUV.z - pNear) / (pFar - pNear);
lightDistance = lightDistance - depthOffset;
shadowUV.xy = shadowUV.xy/ shadowUV.w;
// 进行多重采样,减小误差
float4 depths = float4(
tex2D(shadowMap, shadowUV.xy + float2(-pixelOffset, 0)).x,
tex2D(shadowMap, shadowUV.xy + float2(pixelOffset, 0)).x,
tex2D(shadowMap, shadowUV.xy + float2(0, -pixelOffset)).x,
tex2D(shadowMap, shadowUV.xy + float2(0, pixelOffset)).x);
float centerdepth = tex2D(shadowMap, shadowUV.xy).x;
// 进行深度比较
float l_Lit = (lightDistance >= centerdepth? 0 : 1);
l_Lit += (lightDistance >= depths.x? 0 : 1);
l_Lit += (lightDistance >= depths.y? 0 : 1);
l_Lit += (lightDistance >= depths.z? 0 : 1);
l_Lit += (lightDistance >= depths.w? 0 : 1);
l_Lit *= 0.2f;
result = float4(l_Lit, l_Lit, l_Lit, 1.0);
}
图 40 展示了使用 shadow map 方法得到的阴影渲染效果。
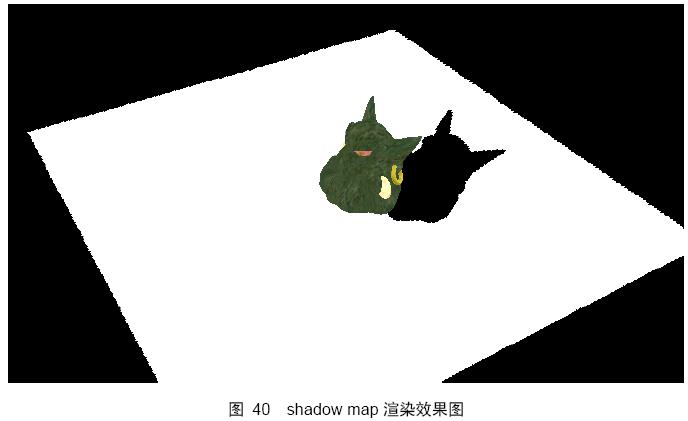
Shadow map 方法的优点是可以使用一般用途的图形硬件对任意的阴影进行绘制,而且创建阴影图的代价与需要绘制的图元数量成线性关系,访问阴影图的时间也固定不变。此外,可以在基于该方法进行改进,创建软阴影效果。所谓软阴影就是光学中的半影区域。如果实时渲染软阴影,并运用到游戏中,是目前光照渲染领域的一个热门研究方向。
但 Shadow map 方法同样存在许多不足之处:
其一:阴影质量与阴影图的分辨率有关,所以很容易出现阴影边缘锯齿现象;
其二:深度值比较的精确度和正确性,有赖于 depth map 中像素点的数据精度,当生成深度图时肯定会造成数据精度的损失。要知道,深度值最后都被归一化到 0 , 1 空间中,所以看起来很小的精度损失也会影响数据比较的正确性,尤其是当两个点相聚非常近时,会出现 z-fighting 现象。所以往往在深度值上加上一个偏移量,人为的弥补这个误差;
其三:自阴影走样( Self-shadow Aliasing ) , 光源采样和屏幕采样通常并不一定在完全相同的位置,当深度图保存的深度值与观察表面的深度做比较时,其数值可能会出现误差,而导致错误的效果,通常引入偏移因子来避免这种情况;
其四:这种方法只适合于灯类型是聚光灯( Spot light )的场合。如果灯类型是点光源( Point light )的话,则在第一步中需要生成的不是一张深度纹理,是一个立方深度纹理( cube texture )。如果灯类型是方向光( Directional light )的话 , ,则产生深度图时需要使用平行投影坐标系下的 worldViewProjMatrix 矩阵;
当前广泛使用的阴影算法中有一种被称之为模板( stencil )阴影算法。模板阴影算法在游戏中得到广泛的使用,在当前主流的开源图形引擎中,基本都集成了该算法。为了对比 shadow map 方法,特地在本书的附录 C 中对其进行阐述。















 5万+
5万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









