







文章目录
接上篇 读PythonRobotics StateLatticePlanner源码-原理篇
2.注释
2.1motion_model.py
这部分主要
- 定义state类型 [ x , y , y a w , v ] [x,y,yaw,v] [x,y,yaw,v],位置,航向,和速度。涉及到state lattice速度模型的部分,使用的是匀速模型
- update(state, v, delta, dt, L):在dt时间内,根据运动模型更新状态数据 s k + 1 = s k + s ˙ Δ t s_{k+1} = s_k + \dot{s}\Delta t sk+1=sk+s˙Δt
- generate_trajectory(s,km,kp,k0):s是运动的弧长,由于是匀速模型,可以计算 Δ t \Delta t Δt;另外涉及到state lattice中的角速度模型部分,使用二次曲线,参数为二次曲线上的三个点 [ k 0 , k m , k f ] [k0,km,kf] [k0,km,kf],将这三个点和时间拟合得到曲线后;向前积分得到整个轨迹上的状态点。
- generate_last_state(s,km,kp,k0):同generate_trajectory,但只返回整个轨迹上的最后一个状态点
import math
import numpy as np
import scipy.interpolate
# motion parameter
L = 1.0 # wheel base
ds = 0.1 # course distanse
v = 10.0 / 3.6 # velocity [m/s]
class State:
def __init__(self, x=0.0, y=0.0, yaw=0.0, v=0.0):
self.x = x
self.y = y
self.yaw = yaw
self.v = v
def pi_2_pi(angle):
return (angle + math.pi) % (2 * math.pi) - math.pi
def update(state, v, delta, dt, L):
state.v = v
state.x = state.x + state.v * math.cos(state.yaw) * dt
state.y = state.y + state.v * math.sin(state.yaw) * dt
state.yaw = state.yaw + state.v / L * math.tan(delta) * dt
state.yaw = pi_2_pi(state.yaw)
return state
def generate_trajectory(s, km, kf, k0):
"""
根据参数p[s,km,kf]向前积分得到轨迹
Parameters
----------
s 弧长
km 经过t/2时的曲率
kf 末尾曲率
k0 初始曲率
Returns
-------
轨迹上所有状态点
"""
#每ds生成一个状态数据
n = s / ds
#匀速模型,经弧长s需要的时间
time = s / v # [s]
if isinstance(time, type(np.array([]))): time = time[0]
if isinstance(km, type(np.array([]))): km = km[0]
if isinstance(kf, type(np.array([]))): kf = kf[0]
#曲率函数中作为自变量的三个时间样本
tk = np.array([0.0, time / 2.0, time])
#曲率函数中作为因变量的三个曲率样本
kk = np.array([k0, km, kf])
#轨迹中所有的时间点
t = np.arange(0.0, time, time / n)
#根据三个样本点拟合得到二次项曲线,即 曲率= fkp(时间),fkp是关于t的二次项函数,返回值是个函数,可以通过传入有关时间的参数得到曲率值
fkp = scipy.interpolate.interp1d(tk, kk, kind="quadratic")
#得到所有时间点处的曲率
kp = [fkp(ti) for ti in t]
dt = float(time / n)
# plt.plot(t, kp)
# plt.show()
#轨迹中添加初始点
state = State()
x, y, yaw = [state.x], [state.y], [state.yaw]
# 根据速度,曲率向前积分得到轨迹上的所有点
for ikp in kp:
state = update(state, v, ikp, dt, L)
x.append(state.x)
y.append(state.y)
yaw.append(state.yaw)
return x, y, yaw
def generate_last_state(s, km, kf, k0):
"""
与generate_trajectory大致相同,区别在于generate_trajectory得到所有轨迹点,这里只要最后一个轨迹点
"""
n = s / ds
time = s / v # [s]
if isinstance(time, type(np.array([]))): time = time[0]
if isinstance(km, type(np.array([]))): km = km[0]
if isinstance(kf, type(np.array([]))): kf = kf[0]
tk = np.array([0.0, time / 2.0, time])
kk = np.array([k0, km, kf])
t = np.arange(0.0, time, time / n)
fkp = scipy.interpolate.interp1d(tk, kk, kind="quadratic")
kp = [fkp(ti) for ti in t]
dt = time / n
# plt.plot(t, kp)
# plt.show()
state = State()
_ = [update(state, v, ikp, dt, L) for ikp in kp]
return state.x, state.y, state.yaw
2.2model_predictive_trajectory_generator.py
这里主要使用《Optimal rough terrain trajectory generation for wheeled mobile robots》论文中Constrained Trajectory Generation的方法,迭代优化控制参数 p p p,以逐步减小残差 Δ X f \Delta X_f ΔXf。
- calc_diff(target, x, y, yaw) 计算残差
- calc_j(target, p, h, k0):计算残差
Δ
X
f
\Delta X_f
ΔXf对于参数
p
p
p的Jacobian,计算方式如下
∂ Δ i , j X f ( p ) ∂ p k = Δ X i , j ( p k + e , p ) − Δ X i , j ( p k − e , p ) 2 e \frac{\partial \Delta_{i,j} X_f(p)}{\partial p_k} = \frac{\Delta X_{i,j}(p_k +e,p) - \Delta X_{i,j}(p_k -e,p)}{2e} ∂pk∂Δi,jXf(p)=2eΔXi,j(pk+e,p)−ΔXi,j(pk−e,p) - selection_learning_param(dp, p, k0, target):在给定的牛顿迭代步长中,选择较优的步长。较优的含义是:使用此步长更新控制参数 p k + 1 = p k + a ⋅ Δ p p_{k+1} =p_{k} +a\cdot \Delta p pk+1=pk+a⋅Δp,生成的路径cost最少。其中 Δ p = − J − 1 Δ X f ( p ) \Delta p = -J^{-1}\Delta X_f(p) Δp=−J−1ΔXf(p)
- optimize_trajectory(target, k0, p):给定初始曲率k0,初始化参数p,使用牛顿迭代得到最优的参数,及参数最优时得到的路径
"""
Model trajectory generator
author: Atsushi Sakai(@Atsushi_twi)
"""
import math
import matplotlib.pyplot as plt
import numpy as np
import motion_model
# optimization parameter
max_iter = 100
h = np.array([0.5, 0.02, 0.02]).T # parameter sampling distance
cost_th = 0.1
show_animation = True
def plot_arrow(x, y, yaw, length=1.0, width=0.5, fc="r", ec="k"): # pragma: no cover
"""
Plot arrow
"""
plt.arrow(x, y, length * math.cos(yaw), length * math.sin(yaw),
fc=fc, ec=ec, head_width=width, head_length=width)
plt.plot(x, y)
plt.plot(0, 0)
def calc_diff(target, x, y, yaw):
"""
计算残差
Parameters
----------
target 目标状态,主要使用 x,y,yaw信息
x 当前x坐标
y 当前y坐标
yaw 当前航向角yaw
Returns
-------
残差
"""
d = np.array([target.x - x[-1],
target.y - y[-1],
motion_model.pi_2_pi(target.yaw - yaw[-1])])
return d
def calc_j(target, p, h, k0):
"""
计算jacobian
Parameters
----------
target 目标状态
p 当前参数
h 对当前参数的微小扰动
k0 初始速度
Returns
-------
残差对当前参数p的雅克比
"""
#第一个参数s进行扰动,s+e,得到扰动后的轨迹终态
xp, yp, yawp = motion_model.generate_last_state(
p[0, 0] + h[0], p[1, 0], p[2, 0], k0)
#计算s+e扰动后的残差
dp = calc_diff(target, [xp], [yp], [yawp])
#第一个参数s进行扰动,s-e,得到扰动后的轨迹终态
xn, yn, yawn = motion_model.generate_last_state(
p[0, 0] - h[0], p[1, 0], p[2, 0], k0)
# 计算s-e扰动后的残差
dn = calc_diff(target, [xn], [yn], [yawn])
# 得到参数s的偏导
d1 = np.array((dp - dn) / (2.0 * h[0])).reshape(3, 1)
# 得到第二个参数的偏导
xp, yp, yawp = motion_model.generate_last_state(
p[0, 0], p[1, 0] + h[1], p[2, 0], k0)
dp = calc_diff(target, [xp], [yp], [yawp])
xn, yn, yawn = motion_model.generate_last_state(
p[0, 0], p[1, 0] - h[1], p[2, 0], k0)
dn = calc_diff(target, [xn], [yn], [yawn])
d2 = np.array((dp - dn) / (2.0 * h[1])).reshape(3, 1)
#得到第三个参数的偏导
xp, yp, yawp = motion_model.generate_last_state(
p[0, 0], p[1, 0], p[2, 0] + h[2], k0)
dp = calc_diff(target, [xp], [yp], [yawp])
xn, yn, yawn = motion_model.generate_last_state(
p[0, 0], p[1, 0], p[2, 0] - h[2], k0)
dn = calc_diff(target, [xn], [yn], [yawn])
d3 = np.array((dp - dn) / (2.0 * h[2])).reshape(3, 1)
# 组成对所有参数的偏导,即jacobian
J = np.hstack((d1, d2, d3))
return J
def selection_learning_param(dp, p, k0, target):
"""
选择牛顿迭代的步长
Parameters
----------
dp 牛顿迭代得到的delta_p
p 当前的参数p
k0 初始曲率
target 目标状态
Returns
-------
选择后较优的学习步长
"""
mincost = float("inf")
#牛顿迭代步长的取值范围
mina = 1.0
maxa = 2.0
da = 0.5
for a in np.arange(mina, maxa, da):
# 按照步长a迭代参数,计算新的参数 tp
tp = p + a * dp
# 根据新的参数tp 生成轨迹
xc, yc, yawc = motion_model.generate_last_state(
tp[0], tp[1], tp[2], k0)
#计算新轨迹终态的残差
dc = calc_diff(target, [xc], [yc], [yawc])
#把残差的标量作为这条轨迹的cost
cost = np.linalg.norm(dc)
# 找使轨迹cost最小的 牛顿迭代步长
if cost <= mincost and a != 0.0:
mina = a
mincost = cost
# print(mincost, mina)
# input()
return mina
def show_trajectory(target, xc, yc): # pragma: no cover
plt.clf()
plot_arrow(target.x, target.y, target.yaw)
plt.plot(xc, yc, "-r")
plt.axis("equal")
plt.grid(True)
plt.pause(0.1)
def optimize_trajectory(target, k0, p):
"""
给定目标状态target,在初始曲率k0,初始参数p[s,km,kf]的条件下,牛顿迭代得到最优参数,和最优参数下的轨迹
Parameters
----------
target 目标状态
k0 初始曲率
p 初始参数
Returns
-------
轨迹,最优参数
"""
for i in range(max_iter):
# 按照初始的参数p生成一条轨迹
xc, yc, yawc = motion_model.generate_trajectory(p[0], p[1], p[2], k0)
# 计算轨迹终态的残差
dc = np.array(calc_diff(target, xc, yc, yawc)).reshape(3, 1)
# 计算轨迹的cost
cost = np.linalg.norm(dc)
# cost在范围内终止迭代
if cost <= cost_th:
print("path is ok cost is:" + str(cost))
break
# 计算残差对于当前参数p的jacobian
J = calc_j(target, p, h, k0)
try:
# -jacobian取逆* 残差 得到参数p的更新量delta_p
dp = - np.linalg.inv(J) @ dc
except np.linalg.linalg.LinAlgError:
print("cannot calc path LinAlgError")
xc, yc, yawc, p = None, None, None, None
break
# 选择较优的迭代步长
alpha = selection_learning_param(dp, p, k0, target)
# 根据参数p的更新量和选择后的步长更新参数p
p += alpha * np.array(dp)
# print(p.T)
if show_animation: # pragma: no cover
show_trajectory(target, xc, yc)
else:
xc, yc, yawc, p = None, None, None, None
print("cannot calc path")
return xc, yc, yawc, p
def test_optimize_trajectory(): # pragma: no cover
# target = motion_model.State(x=5.0, y=2.0, yaw=np.deg2rad(00.0))
target = motion_model.State(x=5.0, y=2.0, yaw=np.deg2rad(90.0))
k0 = 0.0
# 初始化参数
init_p = np.array([6.0, 0.0, 0.0]).reshape(3, 1)
x, y, yaw, p = optimize_trajectory(target, k0, init_p)
if show_animation:
show_trajectory(target, x, y)
plot_arrow(target.x, target.y, target.yaw)
plt.axis("equal")
plt.grid(True)
plt.show()
def main(): # pragma: no cover
print(__file__ + " start!!")
test_optimize_trajectory()
if __name__ == '__main__':
main()
2.3 lookuptable_generator.py
这里主要是采样一些状态空间,利用牛顿迭代求最优参数的方式,提前计算一些最优参数,并保存在文件中。以后有求解任务时,可以通过初始曲率 k 0 k_0 k0,目标位置 x , y , y a w x,y,yaw x,y,yaw,从lookup table中得到一个条件近似的参数值当做初始参数,节省牛顿迭代的计算量。
- calc_states_list():采样一些状态点
- search_nearest_one_from_lookuptable(tx, ty, tyaw, lookuptable):从lookuptable中找 终止状态和tx,ty,tyaw最近似的一条数据
- generate_lookup_table()
"""
Lookup Table generation for model predictive trajectory generator
author: Atsushi Sakai
"""
from matplotlib import pyplot as plt
import numpy as np
import math
import model_predictive_trajectory_generator as planner
import motion_model
import pandas as pd
def calc_states_list():
"""
均匀采样状态空间,生成一些终止点
Returns
-------
状态点
"""
maxyaw = np.deg2rad(-30.0)
x = np.arange(10.0, 30.0, 5.0)
y = np.arange(0.0, 20.0, 2.0)
yaw = np.arange(-maxyaw, maxyaw, maxyaw)
states = []
for iyaw in yaw:
for iy in y:
for ix in x:
states.append([ix, iy, iyaw])
print("nstate:", len(states))
return states
def search_nearest_one_from_lookuptable(tx, ty, tyaw, lookuptable):
"""
从lookuptable中找 终止状态和tx,ty,tyaw最近似的一条数据
"""
mind = float("inf")
minid = -1
for (i, table) in enumerate(lookuptable):
dx = tx - table[0]
dy = ty - table[1]
dyaw = tyaw - table[2]
d = math.sqrt(dx ** 2 + dy ** 2 + dyaw ** 2)
if d <= mind:
minid = i
mind = d
# print(minid)
return lookuptable[minid]
def save_lookup_table(fname, table):
mt = np.array(table)
print(mt)
# save csv
df = pd.DataFrame()
df["x"] = mt[:, 0]
df["y"] = mt[:, 1]
df["yaw"] = mt[:, 2]
df["s"] = mt[:, 3]
df["km"] = mt[:, 4]
df["kf"] = mt[:, 5]
df.to_csv(fname, index=None)
print("lookup table file is saved as " + fname)
def generate_lookup_table():
# 采样状态点
states = calc_states_list()
k0 = 0.0
# x, y, yaw, s, km, kf
lookuptable = [[1.0, 0.0, 0.0, 1.0, 0.0, 0.0]]
for state in states:
# 从lookuptable中找到条件最近的参数
bestp = search_nearest_one_from_lookuptable(
state[0], state[1], state[2], lookuptable)
# 把采样的状态点当做目标点
target = motion_model.State(x=state[0], y=state[1], yaw=state[2])
# 把从lookup table中查到的参数作为初始参数
init_p = np.array(
[math.sqrt(state[0] ** 2 + state[1] ** 2), bestp[4], bestp[5]]).reshape(3, 1)
# 优化参数,生成轨迹
x, y, yaw, p = planner.optimize_trajectory(target, k0, init_p)
# 将优化结果放入lookup table
if x is not None:
print("find good path")
lookuptable.append(
[x[-1], y[-1], yaw[-1], float(p[0]), float(p[1]), float(p[2])])
print("finish lookup table generation")
save_lookup_table("lookuptable.csv", lookuptable)
for table in lookuptable:
xc, yc, yawc = motion_model.generate_trajectory(
table[3], table[4], table[5], k0)
plt.plot(xc, yc, "-r")
xc, yc, yawc = motion_model.generate_trajectory(
table[3], -table[4], -table[5], k0)
plt.plot(xc, yc, "-r")
plt.grid(True)
plt.axis("equal")
plt.show()
print("Done")
def main():
generate_lookup_table()
if __name__ == '__main__':
main()
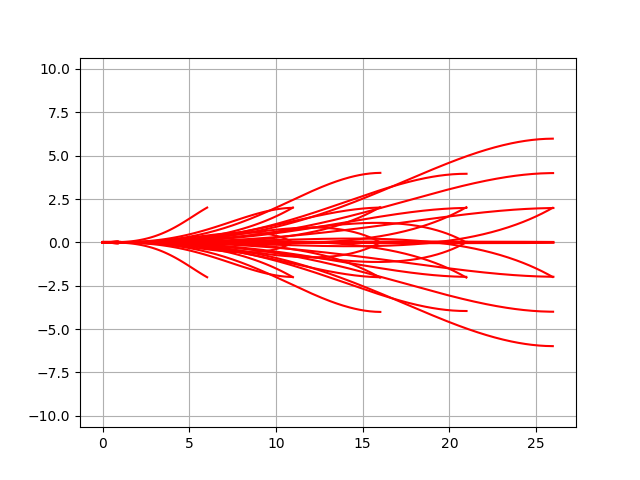
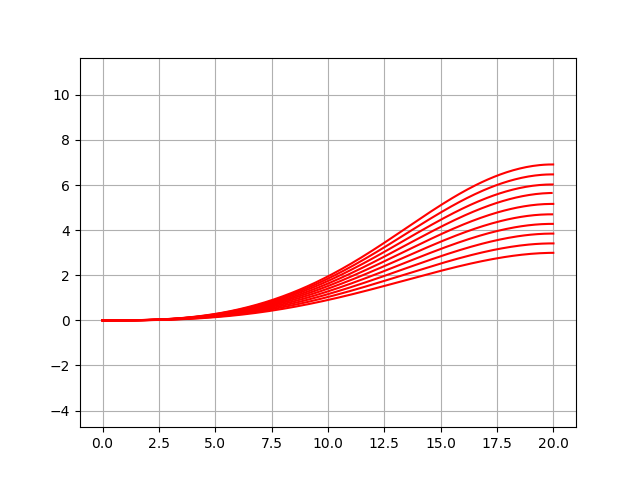
最终的结果是
2.4 state_lattice_planner.py
这部分主要实现论文《State Space Sampling of Feasible Motions for High-Performance Mobile Robot Navigation in Complex Environments》中状态空间采样算法
-
search_nearest_one_from_lookuptable(tx, ty, tyaw, lookup_table):同lookuptable_generator中方法
-
generate_path(target_states, k0):为target_states中采样得到的边界状态生成路径
-
calc_uniform_polar_states(nxy, nh, d, a_min, a_max, p_min, p_max):根据状态空间采样参数进行均匀采样,返回采样得到的边界状态
-
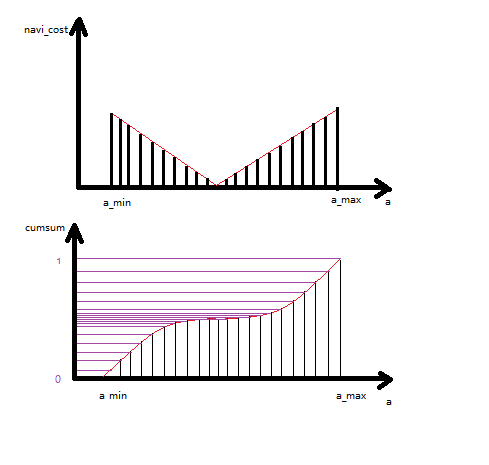
calc_biased_polar_states(goal_angle, ns, nxy, nh, d, a_min, a_max, p_min, p_max):参考global guidance进行偏置采样,即cost高稀疏采样,cost低稠密采样。用采样位置点的角度和终点位置的角度之差代表cost。
- 在navigation function上均匀采样,离目标近时cost低,离目标远时cost高
- normalize,生成新的分布,离目标近时cnav结果也小;相反离目标远时cnav结果大
- 对分布进行积分,离目标近时,积分函数的变化缓慢;离目标远时,积分函数变化快
- 对积分结果csumnav 按照nxy个数均匀采样,在离目标近的区域由于积分函数变化缓慢,采样结果更为密集
-
calc_lane_states(l_center, l_heading, l_width, v_width, d, nxy);车道线的采样
-
uniform_terminal_state_sampling_test1() 使用不同参数进行均匀采样
"""
State lattice planner with model predictive trajectory generator
author: Atsushi Sakai (@Atsushi_twi)
- lookuptable.csv is generated with this script: https://github.com/AtsushiSakai/PythonRobotics/blob/master/PathPlanning/ModelPredictiveTrajectoryGenerator/lookuptable_generator.py
Ref:
- State Space Sampling of Feasible Motions for High-Performance Mobile Robot Navigation in Complex Environments http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.187.8210&rep=rep1&type=pdf
"""
import sys
import os
from matplotlib import pyplot as plt
import numpy as np
import math
import pandas as pd
sys.path.append(os.path.dirname(os.path.abspath(__file__))
+ "/../ModelPredictiveTrajectoryGenerator/")
try:
import model_predictive_trajectory_generator as planner
import motion_model
except ImportError:
raise
table_path = os.path.dirname(os.path.abspath(__file__)) + "/lookuptable.csv"
show_animation = True
def search_nearest_one_from_lookuptable(tx, ty, tyaw, lookup_table):
mind = float("inf")
minid = -1
for (i, table) in enumerate(lookup_table):
dx = tx - table[0]
dy = ty - table[1]
dyaw = tyaw - table[2]
d = math.sqrt(dx ** 2 + dy ** 2 + dyaw ** 2)
if d <= mind:
minid = i
mind = d
return lookup_table[minid]
def get_lookup_table():
data = pd.read_csv(table_path)
return np.array(data)
def generate_path(target_states, k0):
"""
k0是初始曲率,为target_states中的边界状态生成路径
返回所有的路径和最优参数
"""
# x, y, yaw, s, km, kf
lookup_table = get_lookup_table()
result = []
for state in target_states:
#从lookup table中找到最佳的参考参数
bestp = search_nearest_one_from_lookuptable(
state[0], state[1], state[2], lookup_table)
target = motion_model.State(x=state[0], y=state[1], yaw=state[2])
# 把最佳参考作为初始化参数
init_p = np.array(
[math.sqrt(state[0] ** 2 + state[1] ** 2), bestp[4], bestp[5]]).reshape(3, 1)
# 优化路径,生成路径上点,及优化后参数p
x, y, yaw, p = planner.optimize_trajectory(target, k0, init_p)
# 把结果加入result
if x is not None:
print("find good path")
result.append(
[x[-1], y[-1], yaw[-1], float(p[0]), float(p[1]), float(p[2])])
print("finish path generation")
return result
def calc_uniform_polar_states(nxy, nh, d, a_min, a_max, p_min, p_max):
"""
calc uniform state
:param nxy: number of position sampling
:param nh: number of heading sampleing
:param d: distance of terminal state
:param a_min: position sampling min angle
:param a_max: position sampling max angle
:param p_min: heading sampling min angle
:param p_max: heading sampling max angle
:return: states list
"""
# 均匀的采样角度,计算位置
angle_samples = [i / (nxy - 1) for i in range(nxy)]
states = sample_states(angle_samples, a_min, a_max, d, p_max, p_min, nh)
return states
def calc_biased_polar_states(goal_angle, ns, nxy, nh, d, a_min, a_max, p_min, p_max):
"""
calc biased state,cost越小,采样越密集,cost越大,采样越稀疏
:param goal_angle: goal orientation for biased sampling
:param ns: number of biased sampling
:param nxy: number of position sampling
:param nxy: number of position sampling
:param nh: number of heading sampleing
:param d: distance of terminal state
:param a_min: position sampling min angle
:param a_max: position sampling max angle
:param p_min: heading sampling min angle
:param p_max: heading sampling max angle
:return: states list
"""
#位置角度按照ns个数均匀采样
asi = [a_min + (a_max - a_min) * i / (ns - 1) for i in range(ns - 1)]
# 计算cost,相当于对导航函数采样
cnav = [math.pi - abs(i - goal_angle) for i in asi]
# cost的总和
cnav_sum = sum(cnav)
cnav_max = max(cnav)
# normalize,生成新的分布,位置角度与终点角度相差小时cnav结果也小;相反角度相差大时cnav结果也大
cnav = [(cnav_max - cnav[i]) / (cnav_max * ns - cnav_sum)
for i in range(ns - 1)]
# 对分布进行积分,这里角度相差小时,积分函数的变化缓慢;角度相差大时,积分函数变化快
csumnav = np.cumsum(cnav)
di = []
li = 0
# 对积分结果csumnav 按照nxy个数均匀采样,这样在角度相差小的区域,由于积分函数变化缓慢,采样的结果会更为密集
for i in range(nxy):
for ii in range(li, ns - 1):
if ii / ns >= i / (nxy - 1):
di.append(csumnav[ii])
li = ii - 1
break
states = sample_states(di, a_min, a_max, d, p_max, p_min, nh)
return states
def calc_lane_states(l_center, l_heading, l_width, v_width, d, nxy):
"""
calc lane states
:param l_center: lane lateral position
:param l_heading: lane heading
:param l_width: lane width
:param v_width: vehicle width
:param d: longitudinal position
:param nxy: sampling number
:return: state list
"""
xc = d
yc = l_center
states = []
for i in range(nxy):
delta = -0.5 * (l_width - v_width) + \
(l_width - v_width) * i / (nxy - 1)
xf = xc - delta * math.sin(l_heading)
yf = yc + delta * math.cos(l_heading)
yawf = l_heading
states.append([xf, yf, yawf])
return states
def sample_states(angle_samples, a_min, a_max, d, p_max, p_min, nh):
states = []
for i in angle_samples:
#角度采样
a = a_min + (a_max - a_min) * i
#生成位置坐标
for j in range(nh):
xf = d * math.cos(a)
yf = d * math.sin(a)
#航向角
if nh == 1:
yawf = (p_max - p_min) / 2 + a
else:
yawf = p_min + (p_max - p_min) * j / (nh - 1) + a
states.append([xf, yf, yawf])
return states
def uniform_terminal_state_sampling_test1():
#初始角速度
k0 = 0.0
#位置的采样数目
nxy = 5
#航向角采样数目
nh = 3
# 距离,采样位置
d = 20
# 位置分布的角度范围
a_min = - np.deg2rad(45.0)
a_max = np.deg2rad(45.0)
# 航向角的范围
p_min = - np.deg2rad(45.0)
p_max = np.deg2rad(45.0)
#均匀采样
states = calc_uniform_polar_states(nxy, nh, d, a_min, a_max, p_min, p_max)
result = generate_path(states, k0)
for table in result:
xc, yc, yawc = motion_model.generate_trajectory(
table[3], table[4], table[5], k0)
if show_animation:
plt.plot(xc, yc, "-r")
if show_animation:
plt.grid(True)
plt.axis("equal")
plt.show()
print("Done")
def uniform_terminal_state_sampling_test2():
k0 = 0.1
nxy = 6
nh = 3
d = 20
a_min = - np.deg2rad(-10.0)
a_max = np.deg2rad(45.0)
p_min = - np.deg2rad(20.0)
p_max = np.deg2rad(20.0)
states = calc_uniform_polar_states(nxy, nh, d, a_min, a_max, p_min, p_max)
result = generate_path(states, k0)
for table in result:
xc, yc, yawc = motion_model.generate_trajectory(
table[3], table[4], table[5], k0)
if show_animation:
plt.plot(xc, yc, "-r")
if show_animation:
plt.grid(True)
plt.axis("equal")
plt.show()
print("Done")
def biased_terminal_state_sampling_test1():
k0 = 0.0
nxy = 30
nh = 2
d = 20
a_min = np.deg2rad(-45.0)
a_max = np.deg2rad(45.0)
p_min = - np.deg2rad(20.0)
p_max = np.deg2rad(20.0)
ns = 100
goal_angle = np.deg2rad(0.0)
states = calc_biased_polar_states(
goal_angle, ns, nxy, nh, d, a_min, a_max, p_min, p_max)
result = generate_path(states, k0)
for table in result:
xc, yc, yawc = motion_model.generate_trajectory(
table[3], table[4], table[5], k0)
if show_animation:
plt.plot(xc, yc, "-r")
if show_animation:
plt.grid(True)
plt.axis("equal")
plt.show()
def biased_terminal_state_sampling_test2():
k0 = 0.0
nxy = 30
nh = 1
d = 20
a_min = np.deg2rad(0.0)
a_max = np.deg2rad(45.0)
p_min = - np.deg2rad(20.0)
p_max = np.deg2rad(20.0)
ns = 100
goal_angle = np.deg2rad(30.0)
states = calc_biased_polar_states(
goal_angle, ns, nxy, nh, d, a_min, a_max, p_min, p_max)
result = generate_path(states, k0)
for table in result:
xc, yc, yawc = motion_model.generate_trajectory(
table[3], table[4], table[5], k0)
if show_animation:
plt.plot(xc, yc, "-r")
if show_animation:
plt.grid(True)
plt.axis("equal")
plt.show()
def lane_state_sampling_test1():
k0 = 0.0
l_center = 10.0
l_heading = np.deg2rad(0.0)
l_width = 3.0
v_width = 1.0
d = 10
nxy = 5
states = calc_lane_states(l_center, l_heading, l_width, v_width, d, nxy)
result = generate_path(states, k0)
if show_animation:
plt.close("all")
for table in result:
xc, yc, yawc = motion_model.generate_trajectory(
table[3], table[4], table[5], k0)
if show_animation:
plt.plot(xc, yc, "-r")
if show_animation:
plt.grid(True)
plt.axis("equal")
plt.show()
def main():
planner.show_animation = show_animation
uniform_terminal_state_sampling_test1()
uniform_terminal_state_sampling_test2()
biased_terminal_state_sampling_test1()
biased_terminal_state_sampling_test2()
lane_state_sampling_test1()
if __name__ == '__main__':
main()
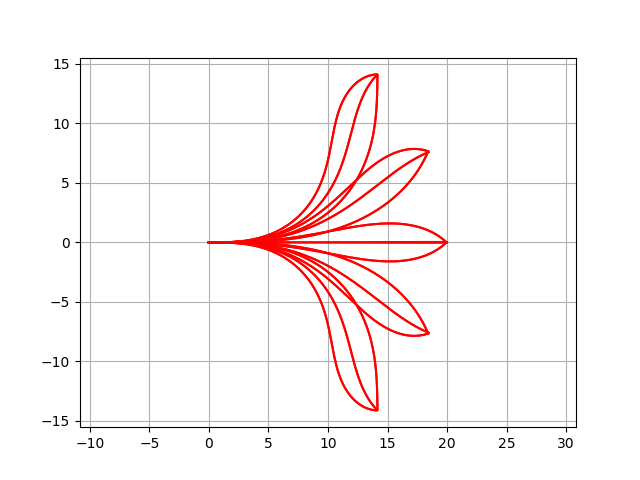
均匀采样举例
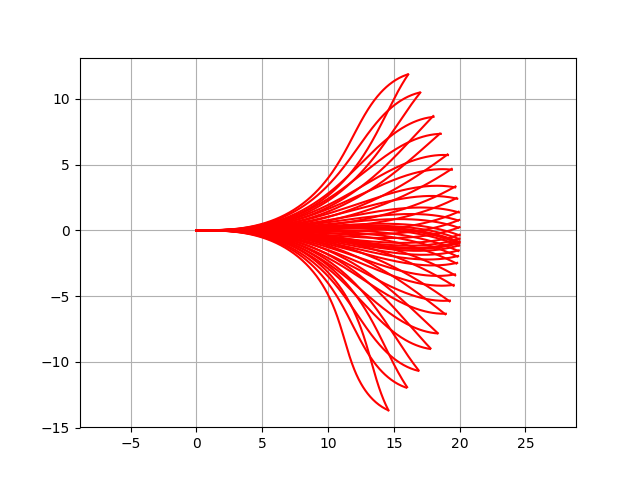
有global guidance 的稠密稀疏采样
车道采样















 6179
6179











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









