







STM32 CAN波特率计算
简介
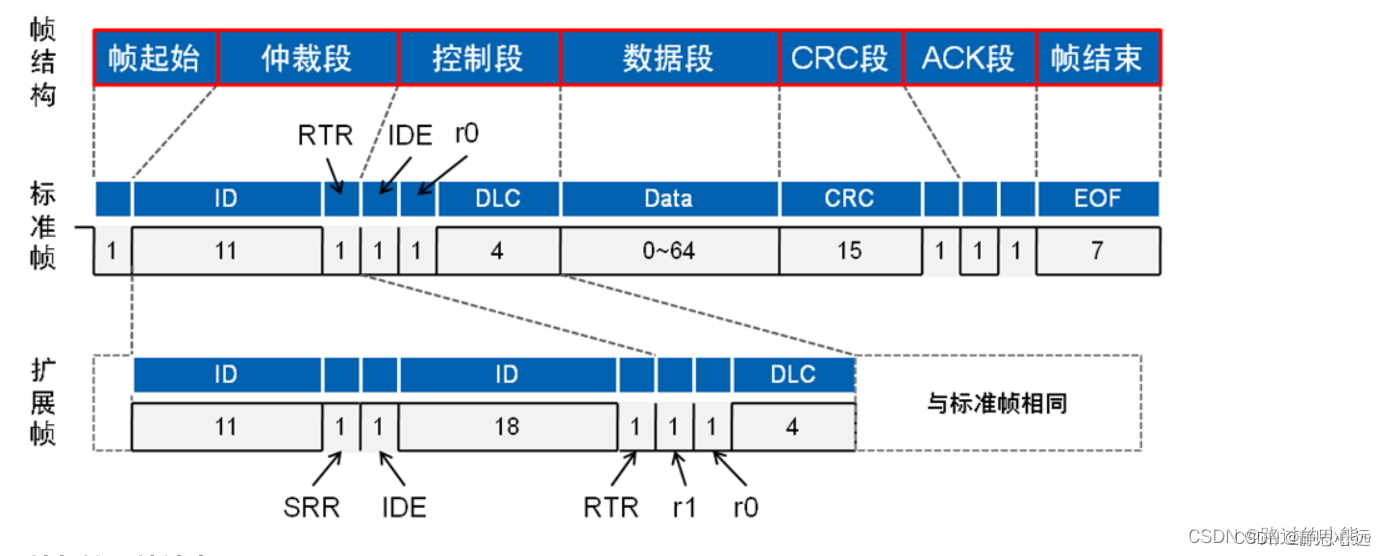
CAN通信帧共分为数据帧、远程帧、错误帧、过载帧和帧间隔,本文这里以数据帧为例。
显性电平对应逻辑0,CAN_H和CAN_L之差为2.5V左右。而隐性电平对应逻辑1,CAN_H和CAN_L之差为0V.
数据帧有标准帧和扩张帧两种格式,一个11位,一个29位.
标准帧和扩张帧两种格式区别:
- 1.扩展帧的仲裁域有29位,可以出现2^29中报文,且在数据链路上是有间隙的(对操作者透明),帧ID的范围是0000 0000-1FFF FFFF。(PS:目的就是构造29位的CAN ID,可以实现更加庞大的ID群)
- 2.标准帧的仲裁域是连续的11位,可以出现2^11种报文,也就是帧ID的范围是000-7FF;
- 3.标准帧和扩张帧的控制帧中的DLC(数据长度)完全相同,但保留位不同,标准帧为IDE、R0,扩展帧为R1、R0,必须以显性电平发送(由数据链路层操作)
注意:这里的帧ID 并不是表示发送的目的地址,而是表示访问总线的消息的优先级(帧ID值越小,优先级越高,最小是0x00000000)
CAN协议特点:
1、多主控制。
2、系统柔软性。
3、通讯速度快,通讯距离远。
4、具有错误检测、错误通知、错误恢复功能。
5、故障封闭功能。
6、连接节点多
CAN总线具有自动仲裁功能,这样就提高了总线的利用率。
CAN总线没有被发送出去的隐性信号,会由CAN控制器后续发送出去。这里牵涉到CAN总线优先级的问题,后续进一步讲述。
当然,CAN相比485具有明显优势,主要原因还是在于CAN控制器。
CAN直接通过TX连接对方的RX引脚,单向传输可以,双向传输就不行,因为CAN控制器会实时监测发送出去的信号是否正确。也就是说TX要与RX信号一致才行,否则CAN控制器认为你发送失败。
CAN总线收发,中断方式接收配置
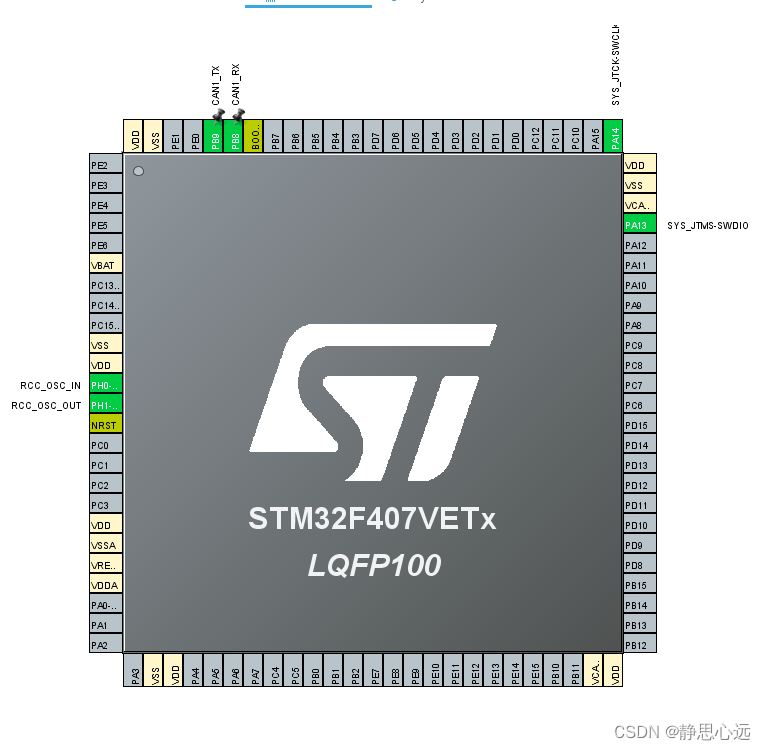
平台:STM32F407VEt6
STM32CUBEMX V5.3
配置CAN
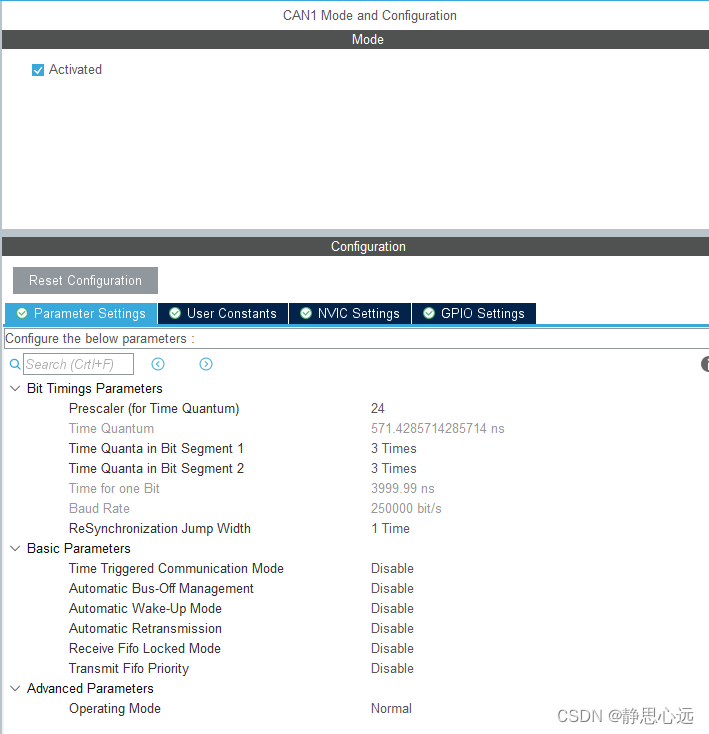
CAN的波特率最大为1Mbps。
波特率计算方法:时钟主频 / 分频 / (tq1 + tq2 + swj)
以500K的波特率配置为例:
stm32f407的CAN的时钟主频是42M,分24频就是1.75M,在除以(3 + 3 + 1)得到250K的波特率。
注意:stm32cubemx生成的CAN代码是不带过滤器的,需要自己手动添加。

CAN之数据帧格式
代码部分
CAN初始化
/* CAN1 init function */
void MX_CAN1_Init(void)
{
//hz = 42 / 24 / (3+3+1)
hcan1.Instance = CAN1;
hcan1.Init.Prescaler = 24;
hcan1.Init.Mode = CAN_MODE_NORMAL;
hcan1.Init.SyncJumpWidth = CAN_SJW_1TQ;
hcan1.Init.TimeSeg1 = CAN_BS1_3TQ;
hcan1.Init.TimeSeg2 = CAN_BS2_3TQ;
hcan1.Init.TimeTriggeredMode = DISABLE;
hcan1.Init.AutoBusOff = DISABLE;
hcan1.Init.AutoWakeUp = DISABLE;
hcan1.Init.AutoRetransmission = DISABLE;
hcan1.Init.ReceiveFifoLocked = DISABLE;
hcan1.Init.TransmitFifoPriority = DISABLE;
if (HAL_CAN_Init(&hcan1) != HAL_OK)
{
Error_Handler();
}
}
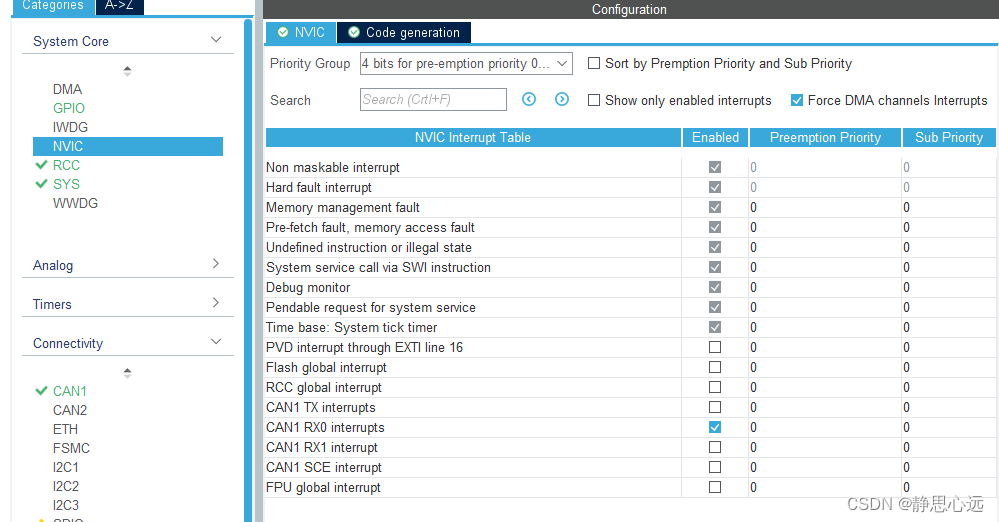
覆写接收中断回调函数
(注意:上面的配置我们使用的式FIFO0,所以要覆写FIFO0的中断回调函数):
//CANÖжϽÓÊջص÷º¯Êý£¬½ÓÊÕµ½µÄÖ¡Í·´æRxMessage£¬Êý¾Ý´ædataÊý×é
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan)
{
uint8_t data[8];
HAL_StatusTypeDef status;
if (hcan == &hcan1) {
status = HAL_CAN_GetRxMessage(hcan, CAN_RX_FIFO0, &RxMessage, data);
if (HAL_OK == status)
{
CAN_ID=RxMessage.StdId;//±ê×¼Ö¡ID¸´ÖÆ
//memcpy(SendBuff,data,8);//½ÓÊÕµ½µÄÊý¾Ý¿½±´µ½·¢ËÍÊý×é
}
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_4, GPIO_PIN_RESET);
}
}
CA发送函数:
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
//CAN ·¢Ëͺ¯Êý
void CAN_SendMsg(uint16_t msgID, uint8_t *Data)
{
CAN_TxHeaderTypeDef TxHeader;
TxHeader.StdId = msgID; //stdID
TxHeader.RTR = CAN_RTR_DATA; //Êý¾ÝÖ¡,CAN_RTR_DATA
TxHeader.IDE = CAN_ID_STD; //±ê×¼¸ñʽ
TxHeader.DLC = 8; //Êý¾Ý³¤¶È
TxHeader.TransmitGlobalTime = DISABLE;
uint8_t TxData[8]; //×î¶à8¸ö×Ö½Ú
TxData[7] = *(Data+0);
TxData[6] = *(Data+1);
TxData[5] = *(Data+2);
TxData[4] = *(Data+3);
TxData[3] = *(Data+4);
TxData[2] = *(Data+5);
TxData[1] = *(Data+6);
TxData[0] = *(Data+7);
while(HAL_CAN_GetTxMailboxesFreeLevel(&hcan1) < 1) {
} //µÈ´ýÓпÉÓõķ¢ËÍÓÊÏä
uint32_t TxMailbox; //ÁÙʱ±äÁ¿, ÓÃÓÚ·µ»ØʹÓõÄÓÊÏä±àºÅ
/* ·¢Ë͵½ÓÊÏ䣬ÓÉCANÄ£¿é¸ºÔð·¢Ë͵½CAN×ÜÏß */
if(HAL_CAN_AddTxMessage(&hcan1, &TxHeader, TxData, &TxMailbox) != HAL_OK)
{
}
}
















 2755
2755











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











