






一、ROS基础——话题、服务、动作编程
1、ros的工作空间
主要是一些存放工程开发相关文件的文件夹,其中主要包括src,build,devel,install文件夹。
其中:
src:代码空间(Source Space )
build:编译空间(Build Space)
devel:开发空间(Development Space)
install:安装空间(Install Space)
1.1.1创建工作空间
创建工作空间创建工作空间是第一步,只有先创建好工作空间,后面的工作才能很好的执行
mkdir -p ~/catkin_ws/src#创建文件夹
cd ~/catkin_ws/src#进入目录
catkin_init_workspace#初始化,使其成为ROS的工作空间
1.1.2编译工作空间
cd ..
catkin_make
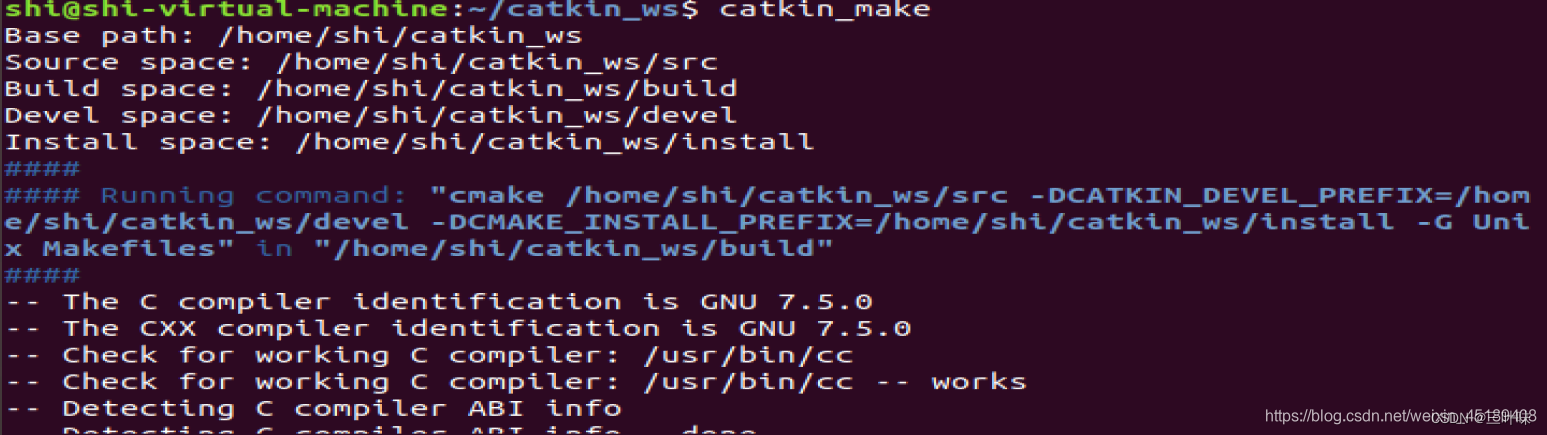
可以看到,在目录下自动生成了两个文件build、devel

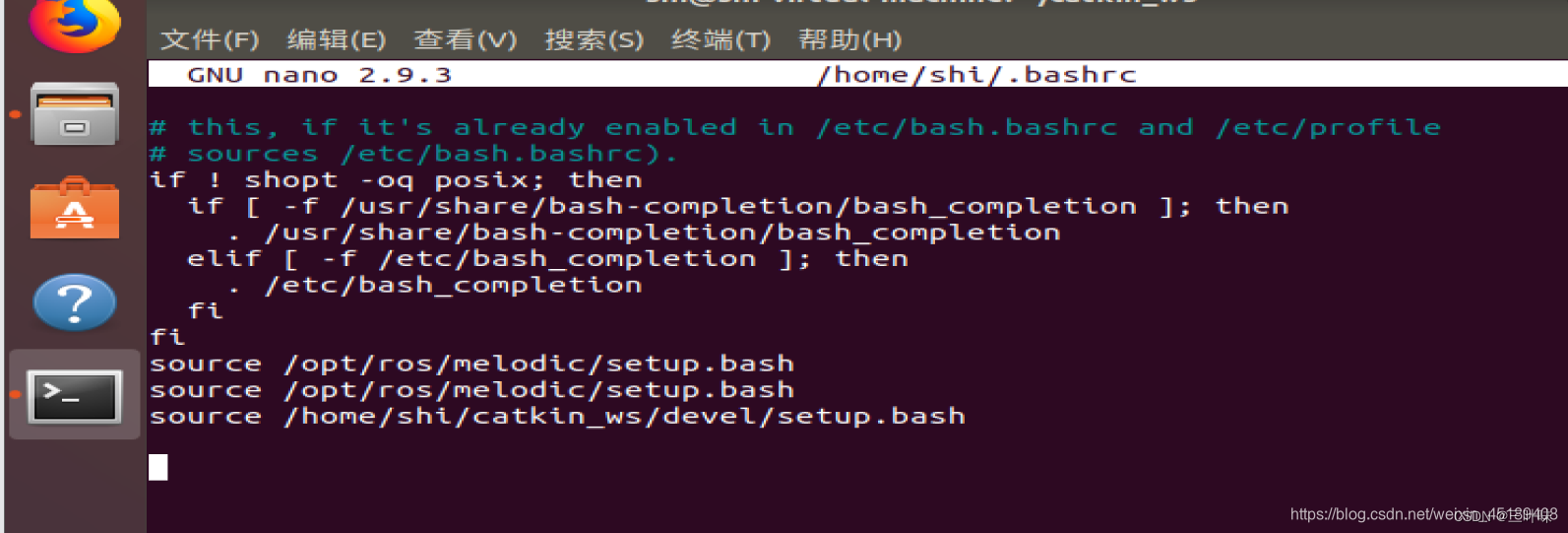
1.1.3环境变量设置
source /home/shi/catkin_ws/devel/setup.bash#该环境变量设置只对当前终端有效,shi是用户名
#将上面命令放置到~/.bashrc文件中,让其对所有终端都有效
sudo nano ~/.bashrc
2.功能包
1.2.1创建功能包
cd ~/catkin_ws/src
catkin_create_pkg learning_communication std_msgs rospy roscpp
#catkin_create_pkg 功能包名字 依赖
#std_msgs:定义的标准的数据结构
#rospy:提供python编程接口
#roscpp:提供c++编程接口
1.2.2编译功能包
cd ~/catkin_ws
catkin_make
3.ROS通信编程
创建cpp文件
gedit talker.cpp
gedit listener.cpp
talker.cpp
#include<sstream>
#include"ros/ros.h"
#include"std_msgs/String.h"
int main(int argc,char **argv)
{
//ROS节点初始化
ros::init(argc,argv,"talker");
//创建节点句柄
ros::NodeHandle n;
//创建一个Publisher,发布名为chatter的topic,消息类型为std_msgs::String
ros::Publisher chatter_pub=n.advertise<std_msgs::String>("chatter",1000);
//设置循环的频率
ros::Rate loop_rate(10);
int count=0;
while(ros::ok())
{
//初始化std_msgs::String类型的消息
std_msgs::String msg;
std::stringstream ss;
ss<<"hello world"<<count;
msg.data=ss.str();
//发布消息
ROS_INFO("%s",msg.data.c_str());
chatter_pub.publish(msg);
//循环等待回调函数
ros::spinOnce();
//接受循环频率延时
loop_rate.sleep();
++count;
}
return 0;
}
listener.cpp
#include"ros/ros.h"
#include"std_msgs/String.h"
//接收到订阅的消息,会进入消息的回调函数
void chatterCallback(const std_msgs::String::ConstPtr& msg)
{
//将接收到的消息打印处理
ROS_INFO("I heard:{%s}",msg->data.c_str());
}
int main(int argc,char **argv)
{
//初始化ROS节点
ros::init(argc,argv,"listener");
//创建节点句柄
ros::NodeHandle n;
//创建一个Subscriber,订阅名为chatter的topic,注册回调函数chatterCallback
ros::Subscriber sub=n.subscribe("chatter",1000,chatterCallback);
//循环等待回调函数
ros::spin();
return 0;
}
设置CMakeLists.txt文件
加入以下代码
add_executable(talker src/talker.cpp)
target_link_libraries(talker ${catkin_LIBRARIES})
add_executable(listener src/listener.cpp)
target_link_libraries(listener ${catkin_LIBRARIES})
编译

运行
roscore
rosrun learning_communication talker
rosrun learning_communication listener

出现“[rospack]Error:package ‘learning_communication’ not found”错误
解决方法:
sudo gedit ~/.bashrc
在末尾添加source /home/xxx/catkin_ws/devel/setup.bash
这里xxx指的是自己的用户名
4.服务编程
1.定义srv文件
mkdir ~/catkin_ws/src/learning_communication/srv
sudo nano AddTwoInts.srv
AddTwoInts.srv
int64 a
int64 b
---
int64 sum

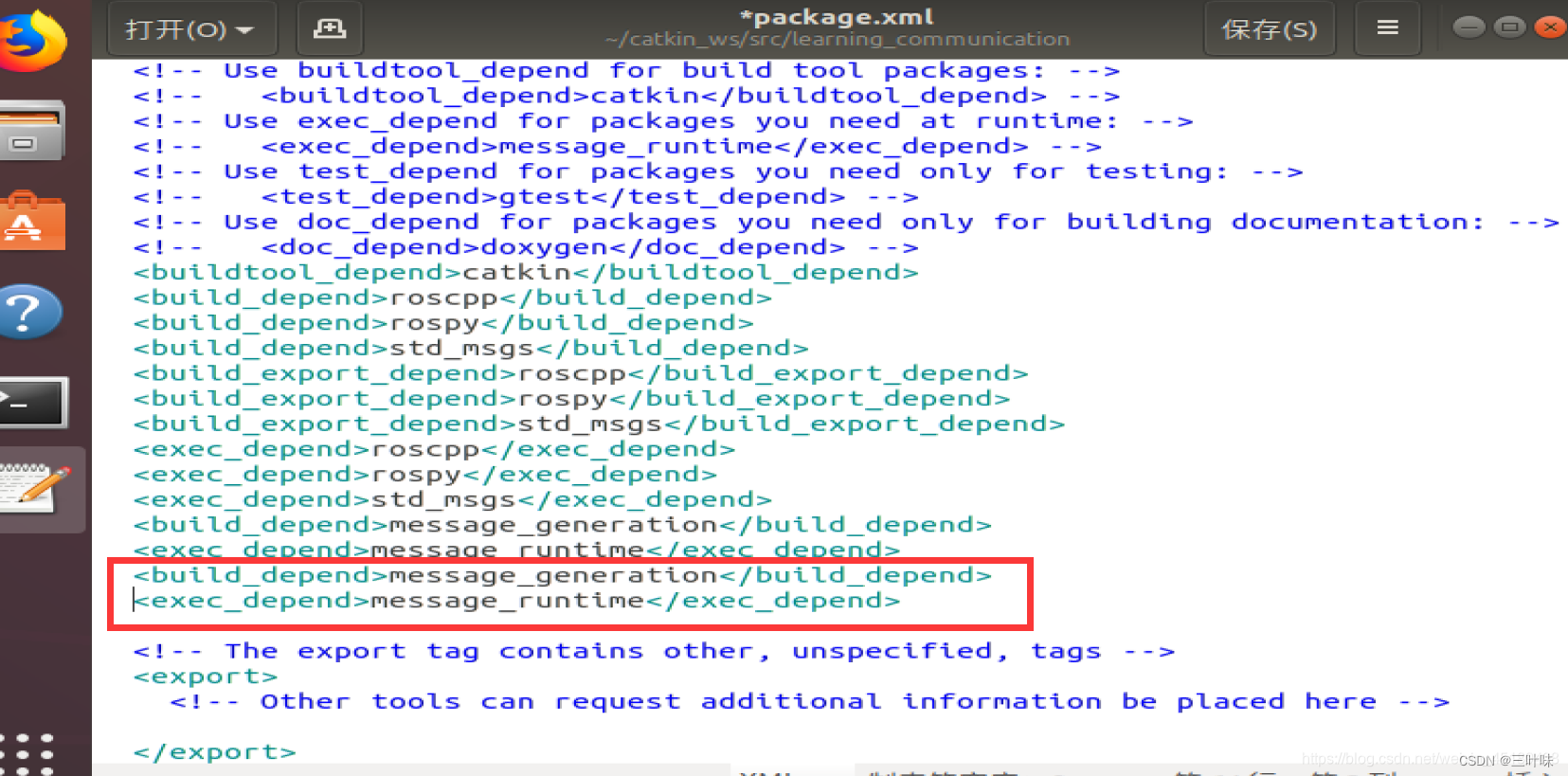
2.在package.xml中添加功能包依赖
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
3.在CMakeLists.txt添加编译选项

在src 里创建cpp文件
gedit server.cpp
gedit client.cpp
server.cpp
#include<ros/ros.h>
#include"learning_communication/AddTwoInts.h"
//service回调函数,输入参数req,输出参数res
bool add(learning_communication::AddTwoInts::Request &req,learning_communication::AddTwoInts::Response &res)
{
//将输入的参数中的请求数据相加,结果放到应答变量中
res.sum=req.a+req.b;
ROS_INFO("request: x=%1d,y=%1d",(long int)req.a,(long int)req.b);
ROS_INFO("sending back response:[%1d]",(long int)res.sum);
return true;
}
int main(int argc,char **argv)
{
//ROS节点初始化
ros::init(argc,argv,"add_two_ints_server");
//创建节点句柄
ros::NodeHandle n;
//创建一个名为add_two_ints的server,注册回调函数add()
ros::ServiceServer service=n.advertiseService("add_two_ints",add);
//循环等待回调函数
ROS_INFO("Ready to add two ints.");
ros::spin();
return 0;
}
client.cpp
#include<cstdlib>
#include<ros/ros.h>
#include"learning_communication/AddTwoInts.h"
int main(int argc,char **argv)
{
//ROS节点初始化
ros::init(argc,argv,"add_two_ints_client");
//从终端命令行获取两个加数
if(argc!=3)
{
ROS_INFO("usage:add_two_ints_client X Y");
return 1;
}
//创建节点句柄
ros::NodeHandle n;
//创建一个client,请求add_two_ints_service
//service消息类型是learning_communication::AddTwoInts
ros::ServiceClient client=n.serviceClient<learning_communication::AddTwoInts>("add_two_ints");
//创建learning_communication::AddTwoInts类型的service消息
learning_communication::AddTwoInts srv;
srv.request.a=atoll(argv[1]);
srv.request.b=atoll(argv[2]);
//发布service请求,等待加法运算的应答请求
if(client.call(srv))
{
ROS_INFO("sum: %1d",(long int)srv.response.sum);
}
else
{
ROS_INFO("Failed to call service add_two_ints");
return 1;
}
return 0;
}
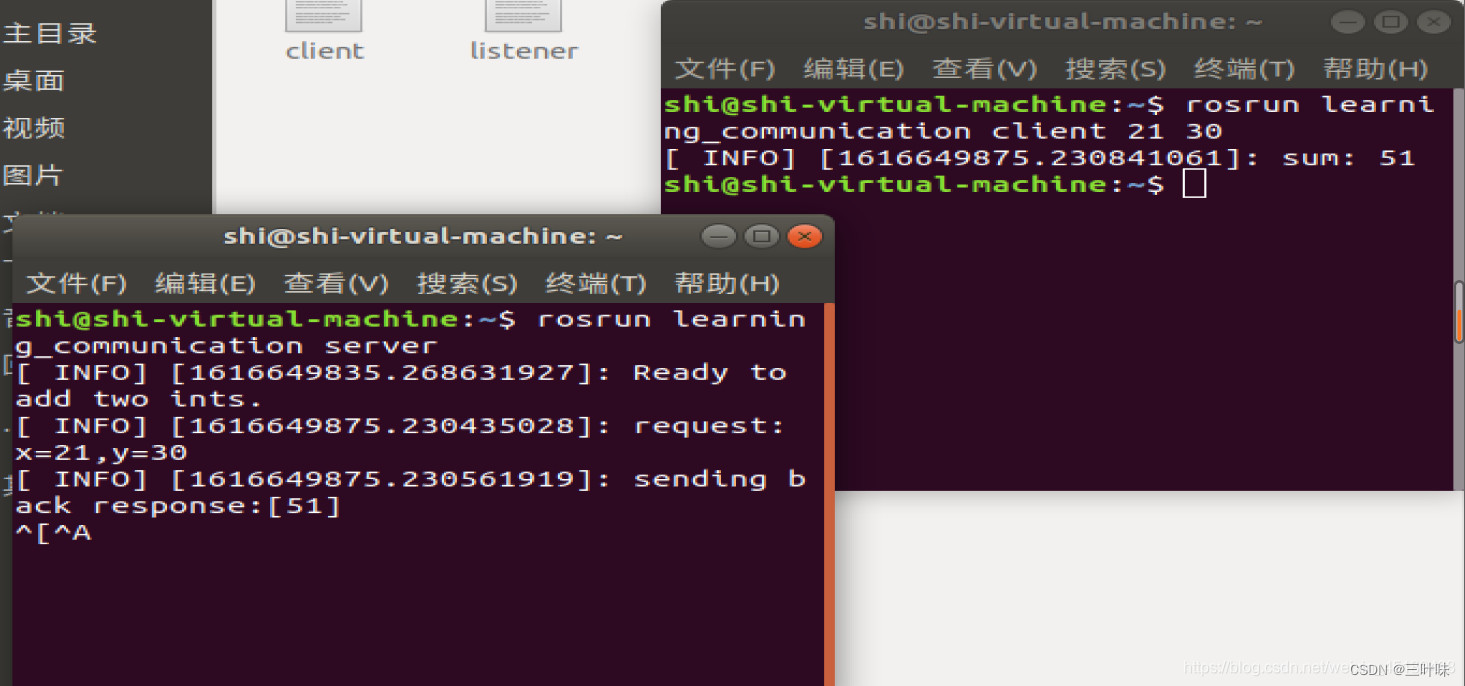
运行可执行文件
先运行server,再运行client
二、Opencv简介
OpenCV(Open Source Computer Vision Library)是一个开源的计算机视觉库,它包含了许多用于处理图像和视频的函数和工具。OpenCV最初由英特尔开发,现在由Willow Garage、Itseez和Intel等公司维护。它支持多种编程语言,包括C++、Python和Java,可以在多个平台上运行,包括Windows、Linux、macOS和Android。OpenCV提供了丰富的图像处理和计算机视觉算法,包括特征检测、目标识别、运动跟踪等功能,被广泛应用于机器视觉、图像处理、安防监控等领域。
OpenCV是一个功能强大的计算机视觉库,它提供了丰富的图像处理和计算机视觉算法,包括但不限于:
- 图像处理:包括图像滤波、边缘检测、图像变换等功能,可以对图像进行各种处理和增强。
- 特征检测与描述:提供了多种特征检测算法,如Harris角点检测、SIFT、SURF等,以及特征描述算法,如ORB、BRIEF等。
- 目标识别与跟踪:包括目标检测、人脸识别、物体跟踪等功能,可以在图像或视频中识别和跟踪特定目标。
- 摄像头标定与几何变换:可以对摄像头进行标定,进行图像的透视变换等几何变换操作。
- 机器学习支持:OpenCV还提供了机器学习模块,可以用于训练和使用机器学习模型,如支持向量机、决策树等。
基础的核心模块:
core模块:实现最核心的数据结构及其基本运算,如绘图函数、数组操作相关函数等;
highgui模块:实现视频与图像的读取、显示、存储等接口;
imgproc模块: 实现图像处理的基础方法,包括图像滤波、图像的几何变换、平滑、阈值分割、形态学处理、边缘检测、目标检测、运动分析和对象跟踪等;
图像处理其他更高层次的方向及应用相关的模块:
stitching模块: 实现图像拼接功能;
features2d模块: 用于提取图像特征及特征匹配;
nonfree模块: 实现一些专利算法,如sift特征;
photo模块: 包含图像修复和图像去噪两部分;
ml模块: 机器学习模块(SVM,决策树,Boosting等);
G-API模块: 包含超高效的图像处理pipeline引擎 ;
FLANN模块: 包含快速近似最近邻搜索FLANN和聚类Clustering算法;
video模块: 针对视频处理,如背景分离,前景检测、对象跟踪等;
objdetect模块: 实现一些目标检测的功能,经典的基于Haar、LBP特征的人脸检测,基于HOG的行人、汽车等目标检测,分类器使用Cascade Classification(级联分类)和Latent SVM等;
calib3d模块: 即Calibration(校准)3D,该模块主要是相机校准和三维重建相关的内容。包含基本的多视角几何算法,单个立体摄像头标定,物体姿态估计,立体相似性算法,3D信息的重建等;
三、Opencv安装
1.下载Opencv3.4.12
国内快速下载网址:Index of /opencv/opencv-3.4.12/ (raoyunsoft.com)
2.解压安装包
将安装包复制到主目录(home)下再进行解压。
输入命令:unzip opencv-3.4.12.zip

3.使用cmake安装opencv
输入命令:cd opencv-3.4.12

输入命令:sudo su
sudo apt-get update
输入命令:sudo apt-get install cmake
输入命令:mkdir build
cd build

4.使用make创建编译
输入命令:sudo make
5.安装
输入命令:sudo make install
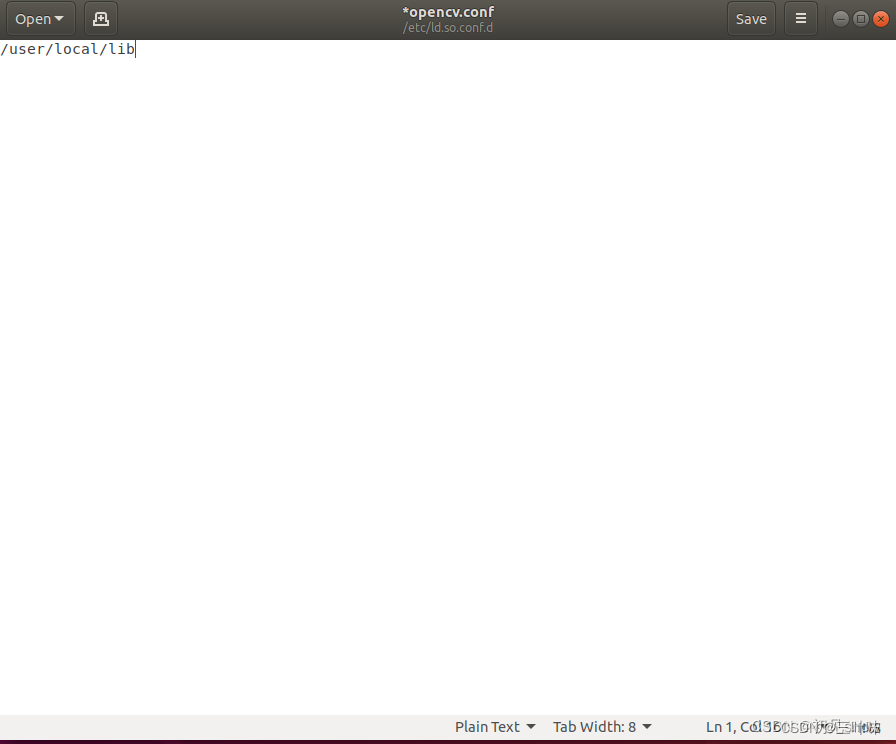
6.配置环境
修改 opencv.conf 文件,打开后的文件是空的,添加 opencv 库的安装路径:/usr/local/lib
输入命令:sudo gedit /etc/ld.so.conf.d/opencv.conf
输入命令:sudo ldconfig
输入命令:sudo gedit /etc/bash.bashrc
在文件末尾加入:
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig export PKG_CONFIG_PATH
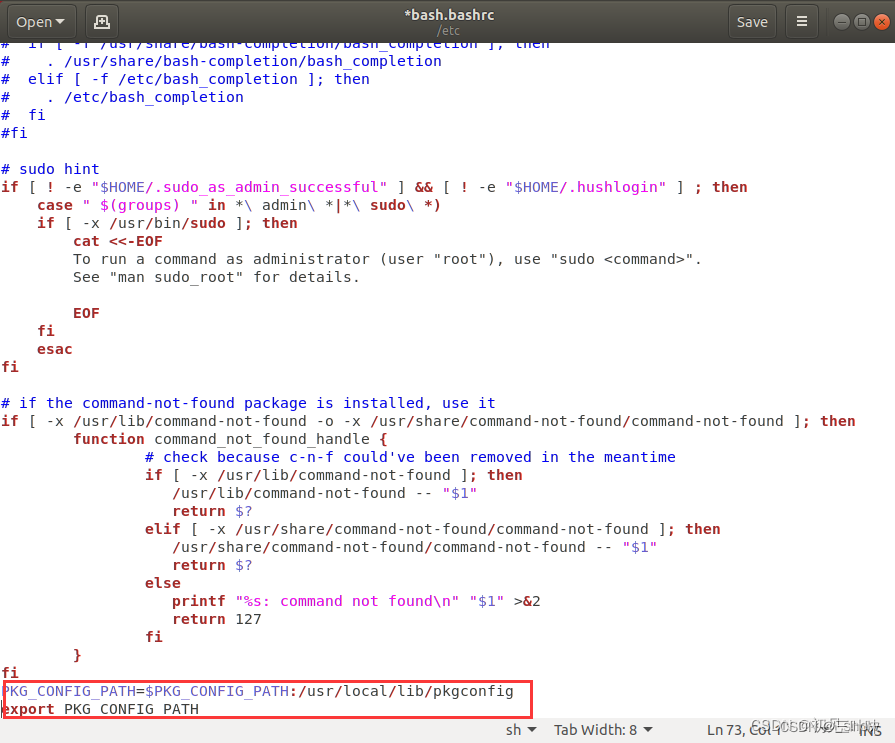
保存并退出,然后执行如下命令使得配置生效:
source /etc/bash.bashrc
pkg-config --modversion opencv
四、使用实例
4.1.图片
4.1.1创建目录和文件
先创建一个test目录,来保证所有作业再目录下进行,后面有文件解会再此文件下进行,图片也需要存入此文件
# mkdir test
# cd test
用以下代码创建一个test1.cpp文件再进行编译
# gedit test1.cpp
然后在文件中填入以下代码,编译图片的代码
#include <opencv2/highgui.hpp>
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
int main(int argc, char** argv)
{
CvPoint center;
double scale = -3;
IplImage* image = cvLoadImage("xixi.jpg");
argc == 2? cvLoadImage(argv[1]) : 0;
cvShowImage("Image", image);
if (!image) return -1; center = cvPoint(image->width / 2, image->height / 2);
for (int i = 0;i<image->height;i++)
for (int j = 0;j<image->width;j++) {
double dx = (double)(j - center.x) / center.x;
double dy = (double)(i - center.y) / center.y;
double weight = exp((dx*dx + dy*dy)*scale);
uchar* ptr = &CV_IMAGE_ELEM(image, uchar, i, j * 3);
ptr[0] = cvRound(ptr[0] * weight);
ptr[1] = cvRound(ptr[1] * weight);
ptr[2] = cvRound(ptr[2] * weight);
}
Mat src;Mat dst;
src = cvarrToMat(image);
cv::imwrite("test.png", src);
cvNamedWindow("test",1); imshow("test", src);
cvWaitKey();
return 0;
}
4.1.2编译文件
gcc编译器:gcc + 文件名 + -o + 输出文件流名称 + 支持包
根据如此,输入如下代码:
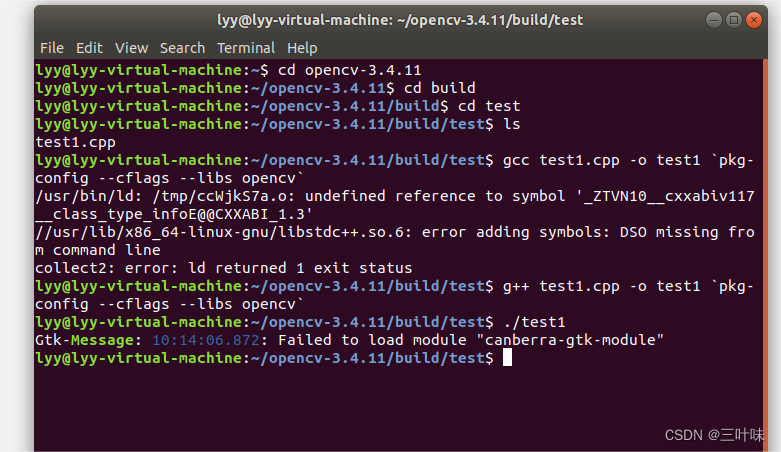
# gcc test1.cpp -o test1 `pkg-config --cflags --libs opencv`

在此文件下预存一个自命名的后缀名为.jpg的图片,此为我们图片原件,编译后可用来比对变化,然后输入以下代码进行对图片的编译:

4.1.3 关于编译命令的解释
注意gcc编译命令: gcc test1.cpp -o test1
pkg-config --cflags --libs opencv
请解释这条编译命令,它是如何获得opencv头文件、链接lib库文件的路径的?
这条编译命令中的 pkg-config --cflags --libs opencv 部分是用来获取OpenCV的头文件路径和库文件路径的。让我来解释一下:
pkg-config 是一个在Unix和Linux系统上用来方便地查询已安装软件包信息的工具。
--cflags 选项用于获取OpenCV的头文件路径,这些路径会被添加到编译器的参数中,以便编译器能够找到OpenCV的头文件。
--libs 选项用于获取OpenCV的库文件路径,这些路径会被添加到链接器的参数中,以便链接器能够找到OpenCV的库文件。
因此,pkg-config --cflags --libs opencv 这部分命令会返回OpenCV的头文件路径和库文件路径,并将其添加到编译命令中,以确保编译器和链接器能够正确找到和使用OpenCV的头文件和库文件。
2.打开摄像头并播放视频
4.2.1下载cheese
sudo apt-get install cheese
4.2.2连接摄像头
点击“虚拟机”,再点击“设置”
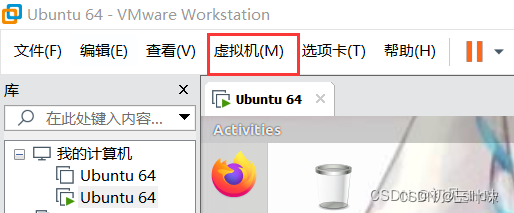
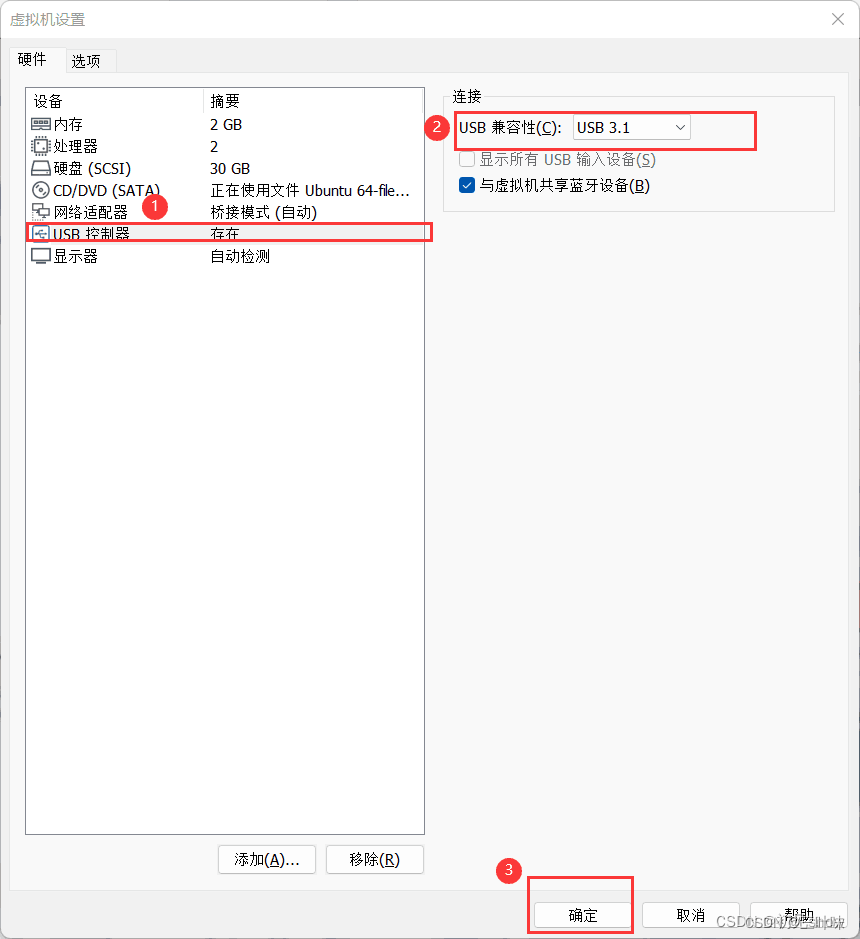
虚拟机右下角这个摄像头图标有个小绿点,则连接成功。

4.2.3播放视频
创建一个test2.cpp文件。
输入命令:vim test2.cpp
将以下代码复制粘贴进去:
#include <opencv2/opencv.hpp>
using namespace cv;
int main()
{
//读取视频
VideoCapture capture("MH.mp4");
//循环显示每一帧
while(1){
Mat frame;//定义一个Mat变量,用于存储每一帧的图像
capture >> frame;//读取当前帧
if(frame.empty())//播放完毕,退出
break;
imshow("读取视频帧",frame);//显示当前帧
waitKey(30);//掩饰30ms
}
system("pause");
return 0;
}
代码讲解:
如果语句:VideoCapture capture(0),后面的参数设置为 0 ,则从摄像头读取视频并循环显示每一帧;如果设置为一个视频的文件名,比如:PC.mp4 ,则会将视频读取并循环显示每一帧。
while 循环体中的 Mat 数据结构其实是一个点阵,对应图像上的每一个点,点的集合形成了一帧图像,有关 Mat 详解请看:OpenCV中Mat数据结构
语句:waitKey(30) ,中的参数单位是 ms 毫秒,也就是每一帧间隔 30 ms ,该语句时不能删除的,否则会执行错误,无法播放视频或录制视频。
此代码会在while循环中一直运行,如果试图用鼠标关闭图像显示窗口,会发现始终关不掉。需要用键盘Ctrl+C 强制中断程序。
编译test2.cpp文件。
g++ test2.cpp -o test2 `pkg-config --cflags --libs opencv`
./test2


3.打开摄像头录制视频
创建一个test3.cpp文件。
vim test3.cpp
编译test3.cpp文件。
g++ test3.cpp -o test3 `pkg-config --cflags --libs opencv`
打开摄像头

按esc键停止并保存。
五、总结
安装opencv是要耐心,在opencv中我们接触到了摄像监控等,还可以用到人脸识别等。
六、参考资料
Ubuntu18.04下OpenCV3.4.11的安装及使用示例_可乐有点好喝的博客-CSDN博客
解决Failed to load module canberra-gtk-module错误_footrip的博客-CSDN博客_canberra-gtk-module















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









