






前言
最近购买了yahboom公司出的dofbot机械臂,配置环境为dofbot机械臂+jetson nano板,是ubuntu18.04系统。
本文主要汇总在使用过程中遇到的问题以及解决的方法,如果有问题无法解决,可以在评论区询问,若作者知道会及时回复。
更改分辨率:
我在拿到板子的时候,屏幕很小,导致在moveit配置以及在rviz仿真等等一些地方,下面的选项选不到,因此,需要更改分辨率,但是一定要看好jetson nano能改成什么分辨率,本人在更改时,是直接在网上搜到一个分辨率,然后更改,导致系统黑屏进不去界面,下面是我出现的问题以及解决方法:
Linux上通过VNC远程桌面分辨率出现问题(Ubuntu 18.04)_vnc看ubuntu18.04怎么调窗口大小-CSDN博客
你可以发现,他动的是系统文件!
真的,不到万不得已,千万不要动系统文件。
然后出现这类问题之后,用Alt+F3,可以有几率卡进终端系统,然后在里面输入命令找到文件改回去,重启,解决。
但是,有没有一个更简单的方法呢?有。利用vnc远程桌面。
我做的时候是先打开小屏幕,等待小屏幕成功进入ubuntu系统后,vnc远程连接,然后直接摁F7,即可切换分辨率,非常好用。小屏幕可能会花,不用管,拔了它电源也没事。
部署urdf文件
真心推荐takedachia-CSDN博客,讲的很细。
在配置moveit时,要注意是否是带夹爪的,takedachia-CSDN博客不带夹爪,上面这个是带夹爪的具体一些配置还是要看这些资料里面的配置过程
一.在规划是出现警告
WARN:Fail:ABORTED:NOmotion plan found. No execution attempted.
1.首先确认位置是否可以到达的
2.可能与默认的运动学算法KDL有关,但是本人换成TRAC-IK同样没有成功。
3.与cpu性能有关,将dofbot.set_planning_time()里面的数字改成10.(这个方法本人成功了)
4.set_goal_tolerance(0.03) 将目标误差设得大一点。然后将这个range(5)改成range(10)或者更高。
for i in range(5):
# 运动规划
plan = dofbot.plan()
if len(plan.joint_trajectory.points) != 0:
print ("plan success")
# 规划成功后运行
dofbot.execute(plan)
break
else:
print ("plan error")
二、运行demo.launch
具体路径dofbot_moveit_config中demo.launch
1.The root link_base has an inertia specified in the URDF, but KDL does not support …
根关节的base_link在urdf中具有惯性参数,但是KDL不支持
解决方法:
<link name="base_footprint" />
</link>
<joint name="base_footprint_joint" type="fixed">
<parent link="base_footprint" />
<child link="base_link" />
</joint>link的名称可以自行更改。
2.Unable to connect to move_group action server ‘move_group‘ within allotted time (30s)
该问题产生的原因可能是rviz在MotionPlanning启用显示的同时启动。可能由于加载的模型过于复杂,导致显示实例化了MoveGroupInterface30 秒的超时时间。
这篇文章就可以解决
三.如何启动实时控制互动界面:joint_state_publisher_gui
方法1:打开 launch/demo.launch:
<arg name="use_gui" default="false" />改成<arg name="use_gui" default="true" />,回工作空间catkin_make一下再启动。
方法2:新打开一个终端,输入:rosrun joint_state_publisher_gui joint_state_publisher_gui可直接打开。
Dofbot机械臂从零部署笔记(1)——ROS之创建URDF模型、配置Moveit和MotionPlanning_机械臂 urdf模型-CSDN博客
此方法在这里有写,我一般用的是方法二。
四、Dofbot机械臂从零部署笔记(2)——ROS之操作实机实时控制机械臂每个关节转动_dofbot机械臂 如果想修改原厂动作-CSDN博客
在这篇文章中,我其实有点想不明白为什么作者要用浏览器去打开00_dofbot_move.py文件,直接打开demo.launch,然后用
python 00_dofbot_move.py或者
roslaunchdofbot_moveit 00_dofbot_move.py都可以
五、这个错误没事,因为如果自己没有在moveit里手动配的话,直接运行它自带的dofbot_moveit.launch的话,在rviz是没有传感器的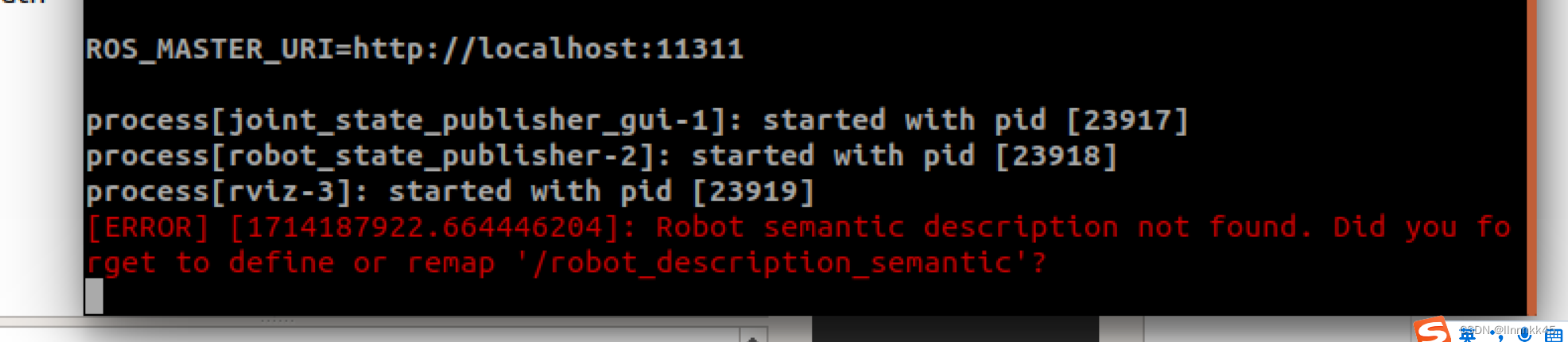 六、可以看见MotionPlanning报警告了,其实你不管也没有多少问题,如果要解决的话,先运行demo.launch,然后另开一个终端,运行dofbot_moveit.launch即可。
六、可以看见MotionPlanning报警告了,其实你不管也没有多少问题,如果要解决的话,先运行demo.launch,然后另开一个终端,运行dofbot_moveit.launch即可。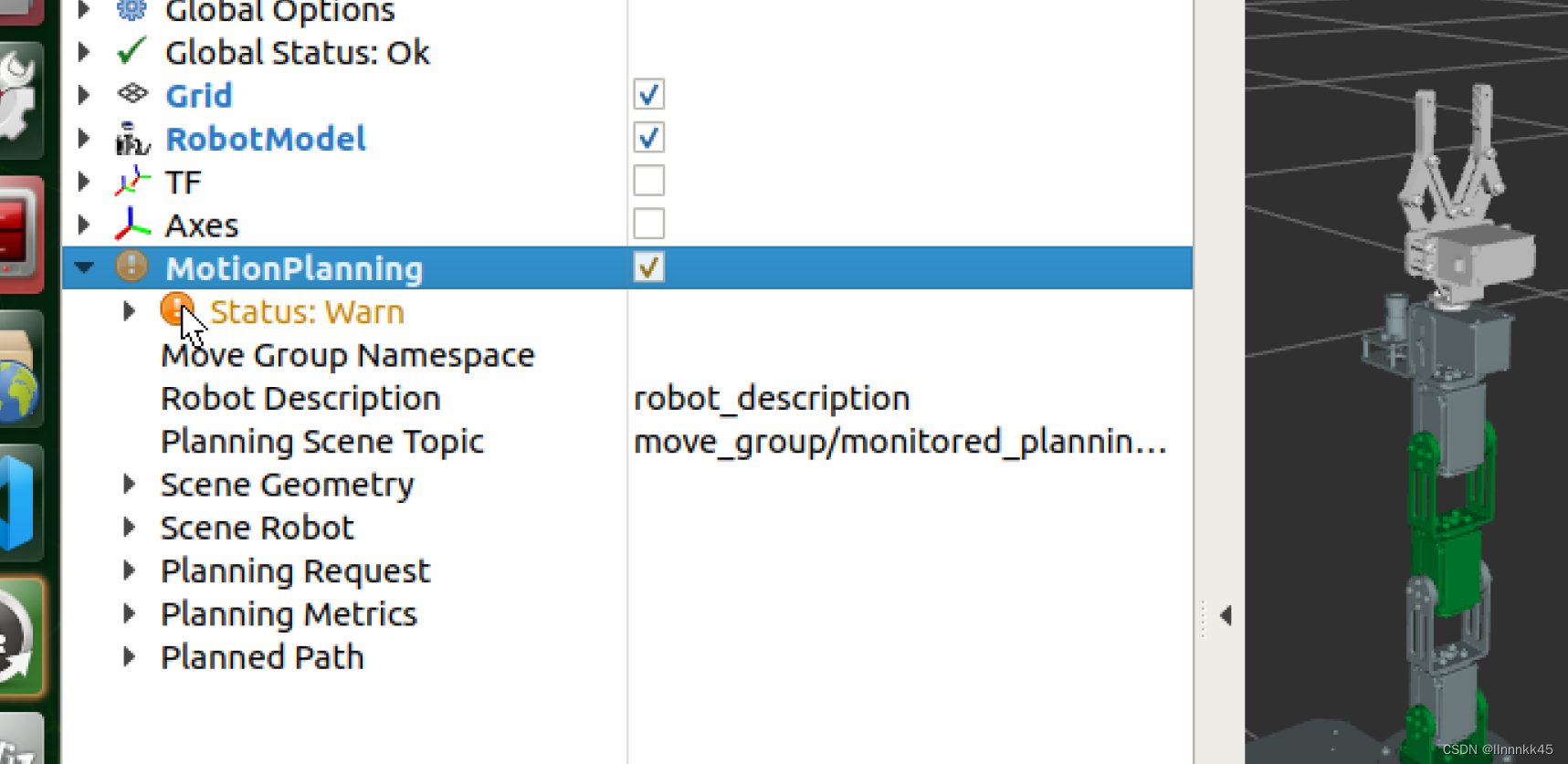















 724
724

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









