




一.前言
本人所用如下配置执行此实验
硬件:IWR1642
toolbox版本:mmwave_industrial_toolbox_3_2_0
实验名称:lab0011-pplcount 实验文件下载
可在TI官网下载对于版本的toolbox找到此实验。
本文从采集数据开始。
二.数据采集
毫米波模块有两个串口通道,user port和data port。
要想获取毫米波从传回的数据需要先通过user port 向毫米波写入cfg配置信息,及后data port就会传回数据。
1.串口助手配置
首先需要打开两个串口软件,我使用VOFA+,并双开。user port的端口依照自己电脑的设备管理器查看,波特率为15200;data port的波特率则不同设置为921600
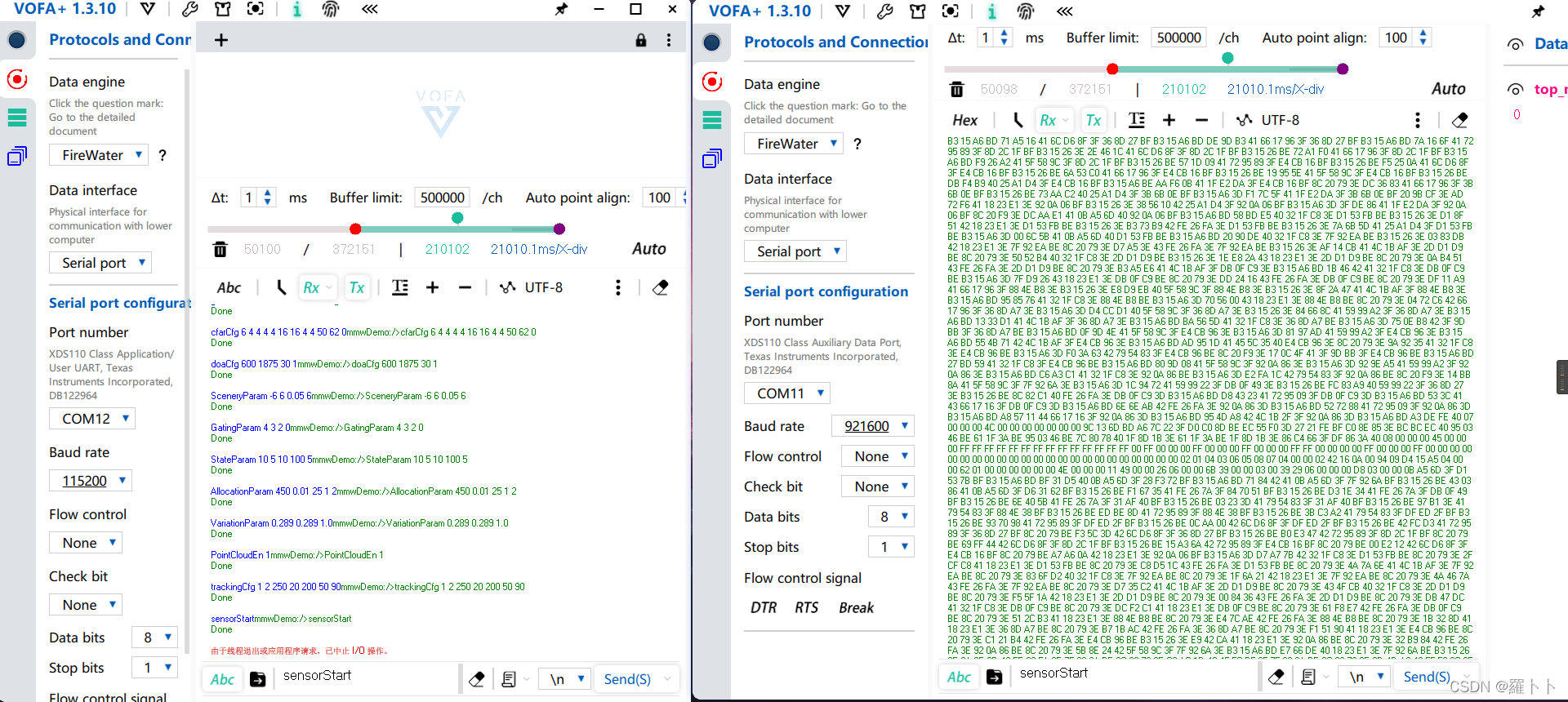
2.写入配置信息
通过连接user port的串口软件窗口写入配置信息,按顺序输入如下信息
dfeDataOutputMode 1
channelCfg 15 3 0
adcCfg 2 1
adcbufCfg 0 1 1 1
profileCfg 0 77 30 7 62 0 0 60 1 128 2500 0 0 30
chirpCfg 0 0 0 0 0 0 0 1
chirpCfg 1 1 0 0 0 0 0 2
frameCfg 0 1 128 0 50 1 0
lowPower 0 1
guiMonitor 1 1 0 0
cfarCfg 6 4 4 4 4 16 16 4 4 50 62 0
doaCfg  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 5402
5402

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









