







作者:李皓辰,百度人工智能高级算法工程师
声明:本文只做分享,版权归原作者,侵权私信删除!
原文:https://zhuanlan.zhihu.com/p/704354580

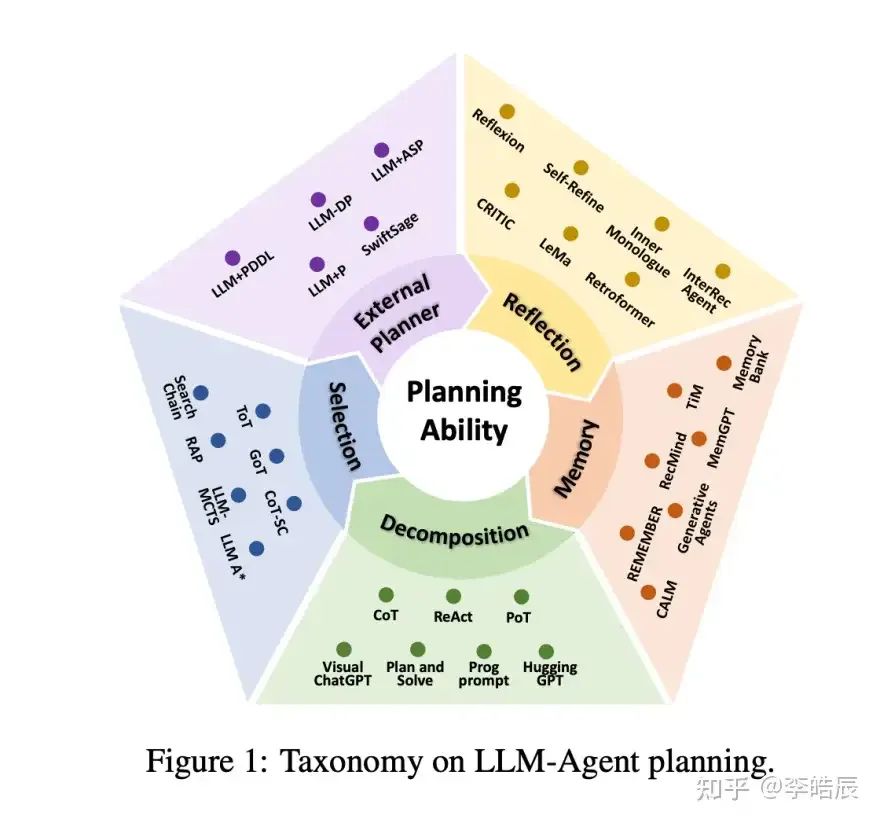
该工作主要梳理了LLM-based Agent 中的规划(planning)能力。
Paper:Understanding the planning of LLM agents: A survey ArXiv:https://arxiv.org/abs/2402.02716
解释
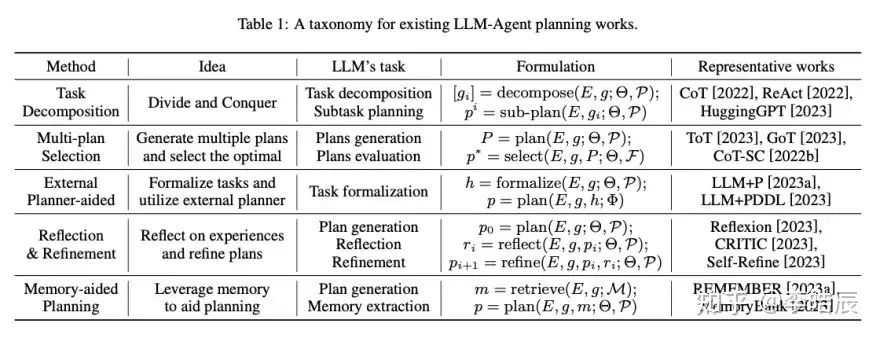
文章中,作者将planning能力进一步细分为了五个维度:
-
• 任务分解(Task Decomposition)
-
• 规划选择(Plan Selection)
-
• 外部辅助规划(External Planner)
-
• 反馈和改进(Reflection and Refinement)
-
• 记忆(Memory)
1. 引言 (Introduction)
-
• 自主智能代理:被定义为能够完成特定任务的智能实体。它们通过感知环境、规划和执行动作来实现目标。
-
• 规划的重要性:规划是代理最关键的能力之一,它要求代理进行复杂的理解、推理和决策过程。
-
• 规划任务的一般表述:在给定的时间步 ,环境表示为 ,动作空间为 ,任务目标为 ,以及在时间步 的动作为 ,规划过程可以被表达为生成一系列动作的序列:。其中, 和 分别代表LLM的参数和任务的提示。
-
• 传统方法的局限性:以往的工作主要依赖于符号方法或基于强化学习的方法,如规划领域定义语言(PDDL)或策略学习。这些传统方法有其局限性,例如符号方法需要将自然语言描述的问题转换为符号建模,这可能需要人类专家的努力,而且缺乏容错性。强化学习方法通常需要与环境的大量样本(交互)来学习有效策略,这在数据收集耗时或成本高昂的场景中可能不切实际。
-
• LLM的潜力:近年来,大型语言模型(LLM)的出现标志着一个范式的转变。LLM在多个领域取得了显著的成功,展示了在推理、工具使用、规划和指令跟随方面的重要智能。这种智能为将LLM作为代理的认知核心提供了可能性,从而有潜力提高规划能力。
-
• 本文工作:尽管已有调查尝试总结LLM的技术,但文献中往往缺乏对规划能力的详细分析。本调查旨在分析最新的研究工作,讨论优势和局限性,并提供对基于LLM的代理规划能力的系统性视角。
2. 任务分解 (Task Decomposition)
现实世界中的任务通常是复杂和多步骤的,直接通过单步规划过程来解决复杂任务是一项巨大挑战。任务分解通过将复杂任务分解为多个简单子任务,使得规划过程更加可行。
分解方法分类:任务分解方法主要分为两类:
-
•
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 457
457

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











