







扩散模型基础(1)原理篇
背景
扩散模型(Diffusion Models)发表以来并没有受到过多关注,它不像GAN那样思想简单粗暴好理解。不过最近几年正在生成模型领域异军突起,例如比较火爆的文字生成图像的模型DALL E2和Google的Imagen,都是基于扩散模型来做的。
相较于GAN,扩散模型的训练过程不存在博弈过程,损失容易收敛。(GAN由于对抗过程,损失经常出现震荡的情况)
相较于VAE:扩散模型需要通过多个高斯分布来描述复杂的图像分布,它的生成图像质量高、多样性好。
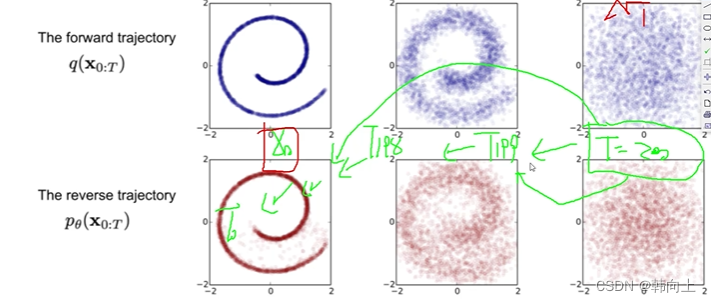
前向扩散
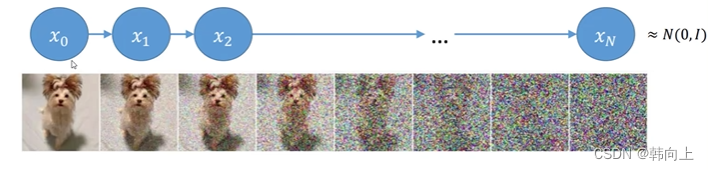
- 每一个时刻都要添加高斯噪声,后一时刻是由前一时刻添加噪声得到的
- 前向加噪声的过程其实是不断构建标签的过程(后面去噪就是学习前面添加的噪声水平),后续会用到。
β
t
\beta_t
βt是先验知识,是一个衰减函数。也就意味着越往后添加的噪声越多.
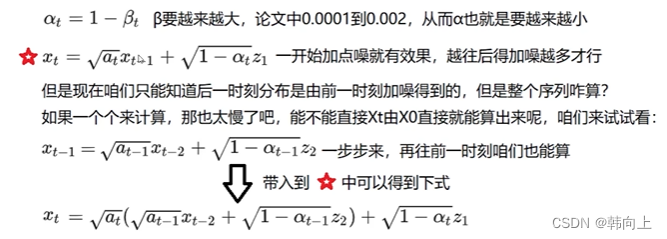
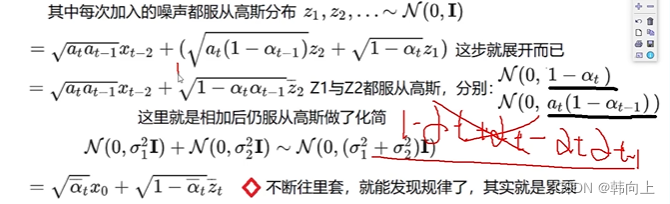
这个公式意味着,任意时刻的分布都可以通过X0初始状态计算出来。在实际训练过程中,对于每一张图像都会随机选择它扩散的时刻t。
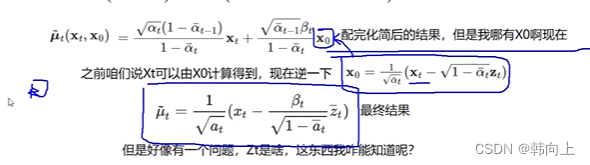
逆向去噪
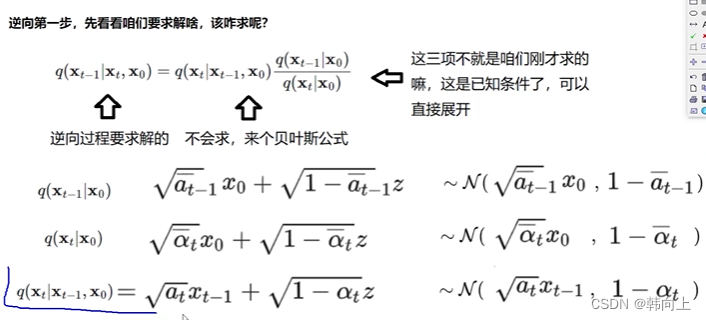
下面,求取条件概率
q
(
x
t
−
1
∣
x
t
,
x
0
)
=
q
(
x
t
∣
x
t
−
1
,
x
0
)
q
(
x
t
−
1
∣
x
0
)
q
(
x
t
∣
x
0
)
q(x_{t-1}|x_t,x_0)=q(x_t|x_{t-1},x_0)\frac{q(x_{t-1}|x_0)}{q(x_t|x_0)}
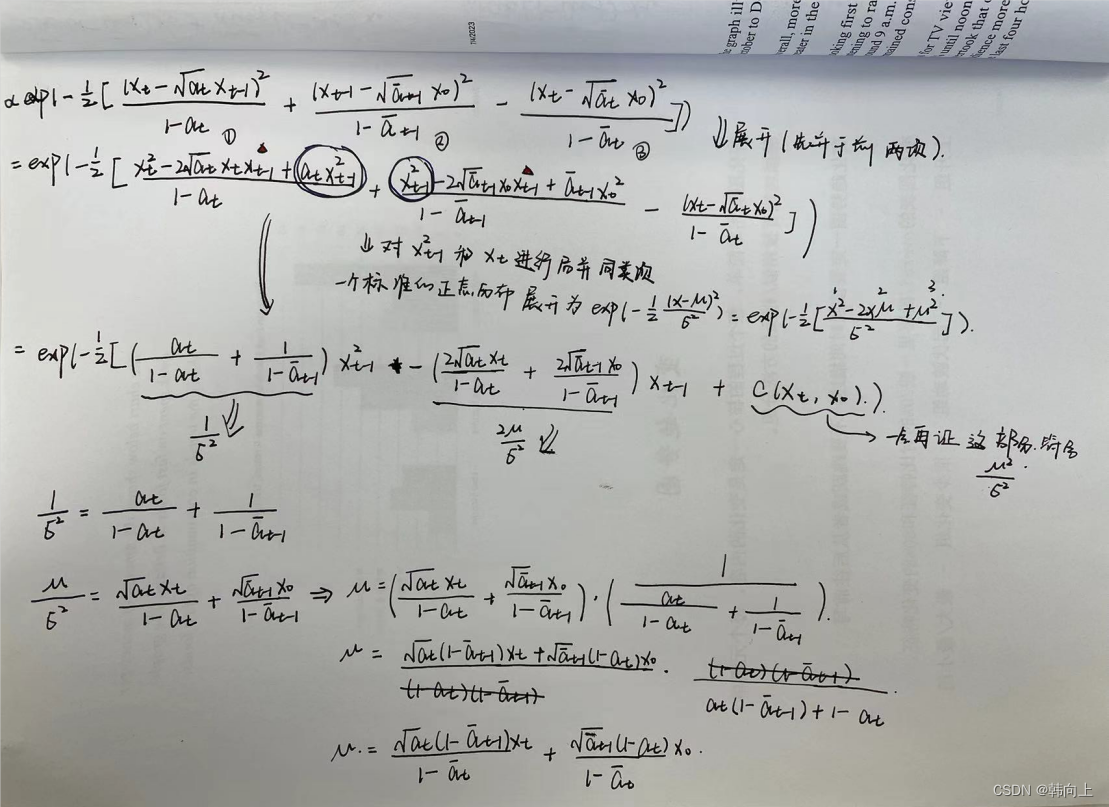
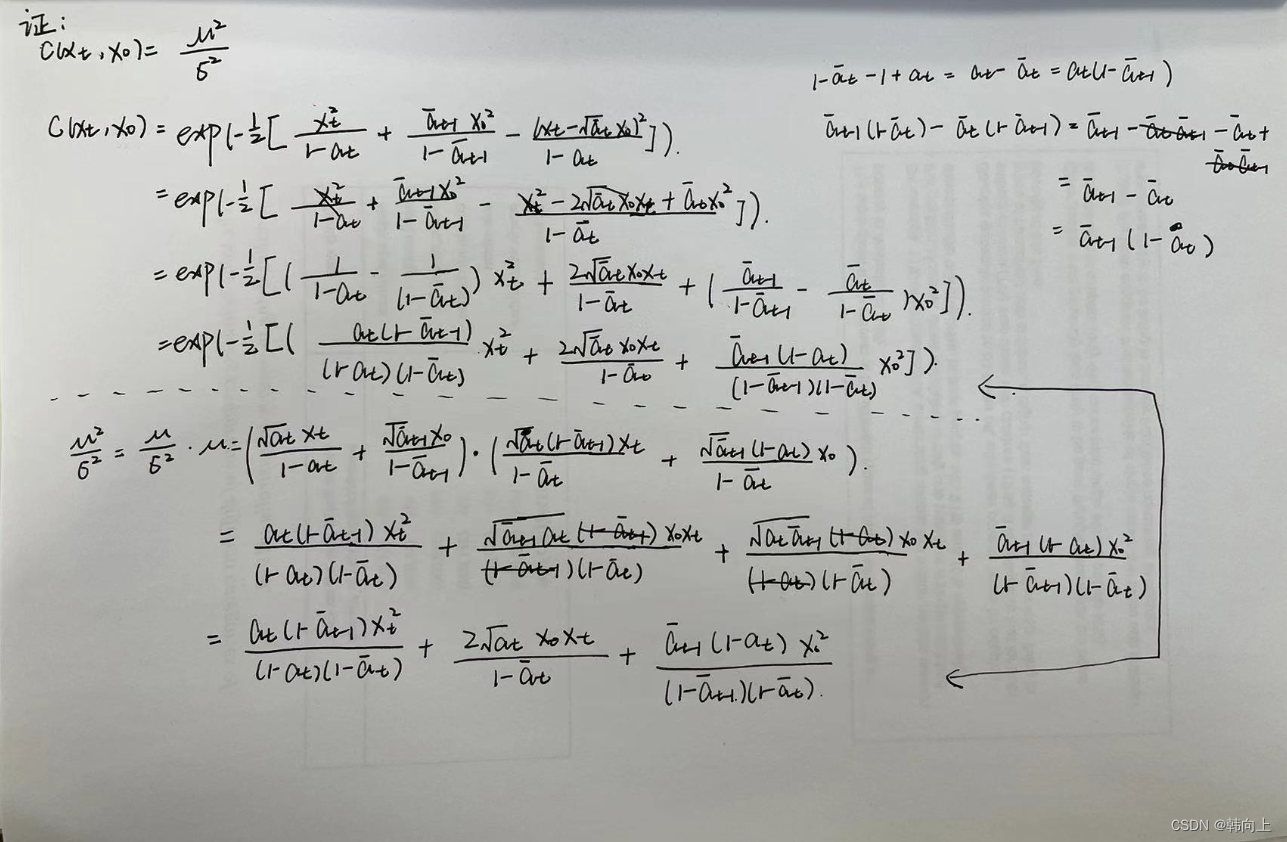
q(xt−1∣xt,x0)=q(xt∣xt−1,x0)q(xt∣x0)q(xt−1∣x0)的概率分布。以及概率分布的均值和方差。
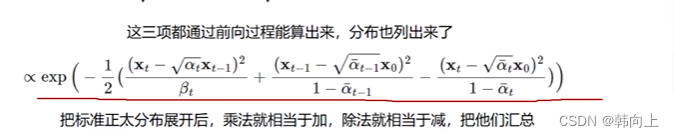
训练阶段只用这个公式下面,估计噪声
模型训练
模型损失
Loss = z t − z t ^ z_t-\hat{z_t} zt−zt^ 估计每一时刻的噪声
模型训练流程
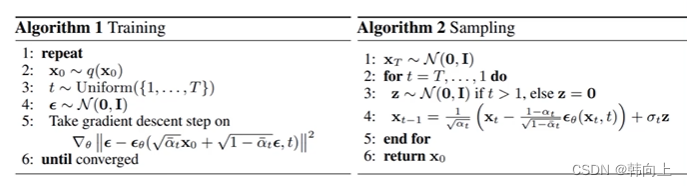
Training:使用损失估计噪声
ϵ
θ
\epsilon_{\theta}
ϵθ
Sampling:得到去噪图像
x
t
−
1
x_{t-1}
xt−1















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









