







1.软件准备
(1)编程平台:Keil5
(2)CubeMX
(3)XCOM(串口调试助手)
2.硬件准备
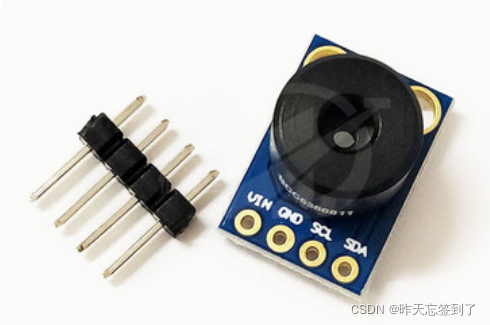
(1)GY-906-BCC红外测温模块
(2)F1的板子,本例使用经典F103C8T6

(3)ST-link 下载器

(4)USB-TTL模块

(5)杜邦线若干

3.模块资料
(1)型号差异

(2)部分参数
供电电压:3-5V (内部低压差稳压)
通信方式:标准IIC通信协议
测量温度范围: -70℃~382.2℃
使用环境温度: -40~125℃
温度测量误差:±0.5℃ (室温下)分辨率0.02℃
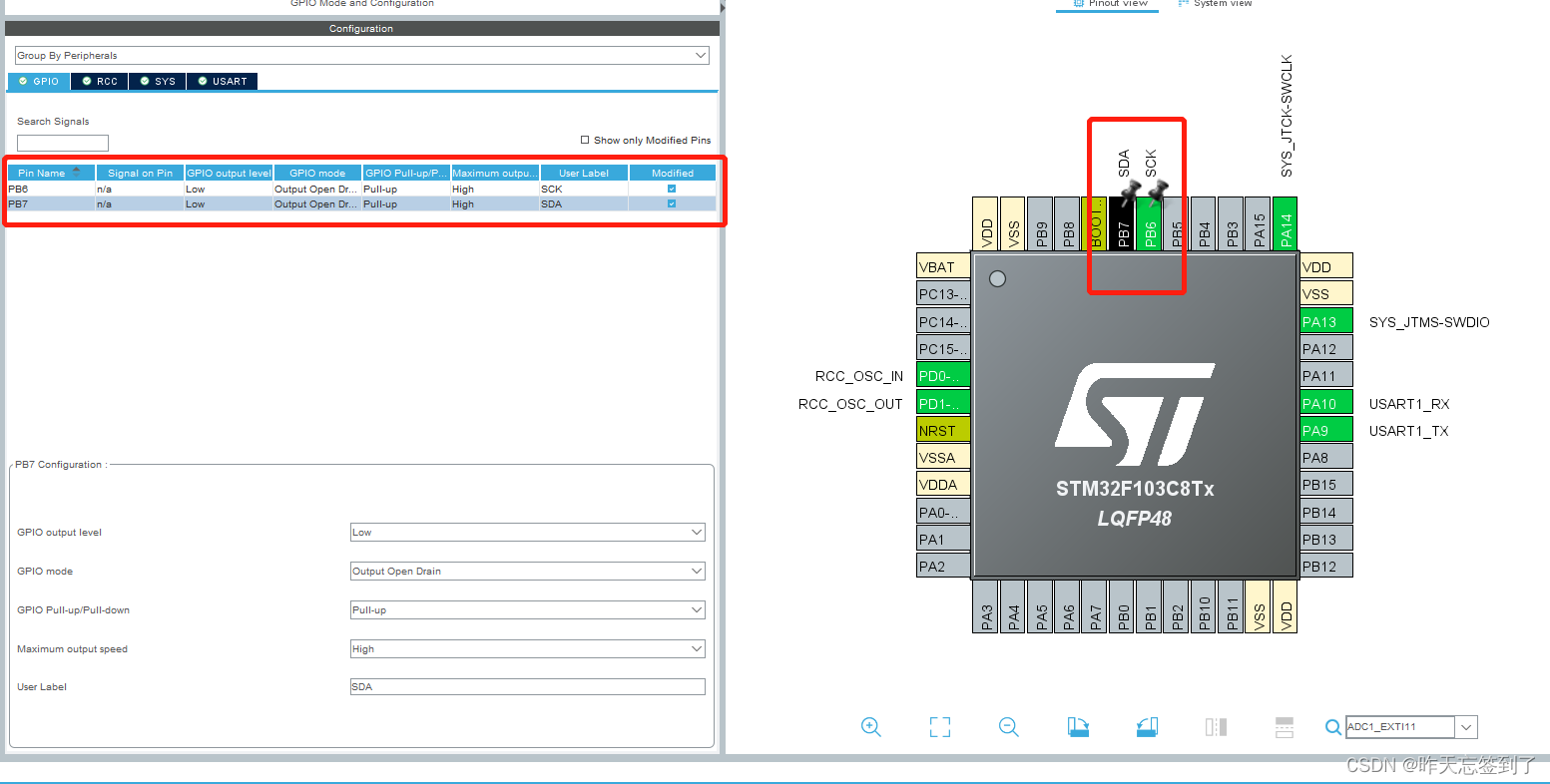
4.CubeMX配置
(1)芯片选择

(2)配置RCC、SYS、时钟树

配置RCC

配置SYS

配置时钟树
(3)配置GPIO
(4)配置串口1

(5)设置路径、生成代码工程
5、Keil5代码
(1)勾选Use MicroLIB

(2)创建GY906.c和GY906.h文件
(3)添加上述的GY906.c文件进工程
(4)GY906.c和GY906.h代码
GY906.c
#include "GY906.h"
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
#define ACK 0
#define NACK 1
#define SA 0x00 //设备地址
#define RAM_ACCESS 0x00 //RAM access command RAM
#define EEPROM_ACCESS 0x20 //EEPROM access command EEPROM
#define RAM_TOBJ1 0x07 //To1 address in the eeprom -70.01 ~ 382.19
#define SMBUS_SCK_H() HAL_GPIO_WritePin(SCK_GPIO_Port,SCK_Pin,GPIO_PIN_SET)
#define SMBUS_SCK_L() HAL_GPIO_WritePin(SCK_GPIO_Port,SCK_Pin,GPIO_PIN_RESET)
#define SMBUS_SDA_H() HAL_GPIO_WritePin(SDA_GPIO_Port,SDA_Pin,GPIO_PIN_SET)
#define SMBUS_SDA_L() HAL_GPIO_WritePin(SDA_GPIO_Port,SDA_Pin,GPIO_PIN_RESET)
#define SMBUS_SDA_PIN() HAL_GPIO_ReadPin(SDA_GPIO_Port,SDA_Pin)
/* Private macro -------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
/*******************************************************************************
* Function Name : SMBus_StartBit
* Description : Generate START condition on SMBus
* Input : None
* Output : None
* Return : None
*******************************************************************************/
void SMBus_StartBit(void)
{
SMBUS_SDA_H(); // Set SDA line
SMBus_Delay(5); // Wait a few microseconds
SMBUS_SCK_H(); // Set SCL line
SMBus_Delay(5); // Generate bus free time between Stop
SMBUS_SDA_L(); // Clear SDA line
SMBus_Delay(5); // Hold time after (Repeated) Start
SMBUS_SCK_L(); // Clear SCL line
SMBus_Delay(5); // Wait a few microseconds
}
/*******************************************************************************
* Function Name : SMBus_StopBit
* Description : Generate STOP condition on SMBus
* Input : None
* Output : None
* Return : None
*******************************************************************************/
void SMBus_StopBit(void)
{
SMBUS_SCK_L(); // Clear SCL line
SMBus_Delay(5); // Wait a few microseconds
SMBUS_SDA_L(); // Clear SDA line
SMBus_Delay(5); // Wait a few microseconds
SMBUS_SCK_H(); // Set SCL line
SMBus_Delay(5); // Stop condition setup time(Tsu:sto=4.0us min)
SMBUS_SDA_H(); // Set SDA line?úSCK=1ê±£??ì2aμ?SDAóé0μ?1±íê?í¨D??áê?£¨é?éy??£?
}
/*******************************************************************************
* Function Name : SMBus_SendByte
* Description : Send a byte on SMBus
* Input : Tx_buffer
* Output : None
* Return : None
*******************************************************************************/
u8 SMBus_SendByte(u8 Tx_buffer)
{
u8 Bit_counter;
u8 Ack_bit;
u8 bit_out;
for(Bit_counter=8; Bit_counter; Bit_counter--)
{
if (Tx_buffer&0x80)
{
bit_out=1; // If the current bit of Tx_buffer is 1 set bit_out
}
else
{
bit_out=0; // else clear bit_out
}
SMBus_SendBit(bit_out); // Send the current bit on SDA
Tx_buffer<<=1; // Get next bit for checking
}
Ack_bit=SMBus_ReceiveBit(); // Get acknowledgment bit
return Ack_bit;
}
/*******************************************************************************
* Function Name : SMBus_SendBit
* Description : Send a bit on SMBus 82.5kHz
* Input : bit_out
* Output : None
* Return : None
*******************************************************************************/
void SMBus_SendBit(u8 bit_out)
{
if(bit_out==0)
{
SMBUS_SDA_L();
}
else
{
SMBUS_SDA_H();
}
SMBus_Delay(2); // Tsu:dat = 250ns minimum
SMBUS_SCK_H(); // Set SCL line
SMBus_Delay(6); // High Level of Clock Pulse
SMBUS_SCK_L(); // Clear SCL line
SMBus_Delay(3); // Low Level of Clock Pulse
// SMBUS_SDA_H(); // Master release SDA line ,
return;
}
/*******************************************************************************
* Function Name : SMBus_ReceiveBit
* Description : Receive a bit on SMBus
* Input : None
* Output : None
* Return : Ack_bit
*******************************************************************************/
u8 SMBus_ReceiveBit(void)
{
u8 Ack_bit;
SMBUS_SDA_H(); //òy????ía2?μ?×èé?à-£?μ±×÷ê?è?
SMBus_Delay(2); // High Level of Clock Pulse
SMBUS_SCK_H(); // Set SCL line
SMBus_Delay(5); // High Level of Clock Pulse
if (SMBUS_SDA_PIN())
{
Ack_bit=1;
}
else
{
Ack_bit=0;
}
SMBUS_SCK_L(); // Clear SCL line
SMBus_Delay(3); // Low Level of Clock Pulse
return Ack_bit;
}
/*******************************************************************************
* Function Name : SMBus_ReceiveByte
* Description : Receive a byte on SMBus
* Input : ack_nack
* Output : None
* Return : RX_buffer
*******************************************************************************/
u8 SMBus_ReceiveByte(u8 ack_nack)
{
u8 RX_buffer;
u8 Bit_Counter;
for(Bit_Counter=8; Bit_Counter; Bit_Counter--)
{
if(SMBus_ReceiveBit()) // Get a bit from the SDA line
{
RX_buffer <<= 1; // If the bit is HIGH save 1 in RX_buffer
RX_buffer |=0x01;
}
else
{
RX_buffer <<= 1; // If the bit is LOW save 0 in RX_buffer
RX_buffer &=0xfe;
}
}
SMBus_SendBit(ack_nack); // Sends acknowledgment bit
return RX_buffer;
}
/*******************************************************************************
* Function Name : SMBus_Delay
* Description : ?óê± ò?′??-?·??1us
* Input : time
* Output : None
* Return : None
*******************************************************************************/
void SMBus_Delay(u32 time)
{
Coarse_delay_us(time);
}
/*******************************************************************************
* Function Name : SMBus_Init
* Description : SMBus3?ê??ˉ
* Input : None
* Output : None
* Return : None
*******************************************************************************/
void SMBus_Init()
{
SMBUS_SCK_H();
SMBUS_SDA_H();
}
/*******************************************************************************
* Function Name : SMBus_ReadMemory
* Description : READ DATA FROM RAM/EEPROM
* Input : slaveAddress, command
* Output : None
* Return : Data
*******************************************************************************/
u16 SMBus_ReadMemory(u8 slaveAddress, u8 command)
{
u16 data; // Data storage (DataH:DataL)
u8 Pec; // PEC byte storage
u8 DataL=0; // Low data byte storage
u8 DataH=0; // High data byte storage
u8 arr[6]; // Buffer for the sent bytes
u8 PecReg; // Calculated PEC byte storage
u8 ErrorCounter; // Defines the number of the attempts for communication with MLX90614
ErrorCounter=0x00; // Initialising of ErrorCounter
slaveAddress <<= 1; //2-7??±íê?′ó?úμ??·
do
{
repeat:
SMBus_StopBit(); //If slave send NACK stop comunication
--ErrorCounter; //Pre-decrement ErrorCounter
if(!ErrorCounter) //ErrorCounter=0?
{
break; //Yes,go out from do-while{}
}
SMBus_StartBit(); //Start condition
if(SMBus_SendByte(slaveAddress))//Send SlaveAddress ×?μí??Wr=0±íê??ó??à′D′?üá?
{
goto repeat; //Repeat comunication again
}
if(SMBus_SendByte(command)) //Send command
{
goto repeat; //Repeat comunication again
}
SMBus_StartBit(); //Repeated Start condition
if(SMBus_SendByte(slaveAddress+1)) //Send SlaveAddress ×?μí??Rd=1±íê??ó??à′?áêy?Y
{
goto repeat; //Repeat comunication again
}
DataL = SMBus_ReceiveByte(ACK); //Read low data,master must send ACK
DataH = SMBus_ReceiveByte(ACK); //Read high data,master must send ACK
Pec = SMBus_ReceiveByte(NACK); //Read PEC byte, master must send NACK
SMBus_StopBit(); //Stop condition
arr[5] = slaveAddress; //
arr[4] = command; //
arr[3] = slaveAddress+1; //Load array arr
arr[2] = DataL; //
arr[1] = DataH; //
arr[0] = 0; //
PecReg=PEC_Calculation(arr);//Calculate CRC
}
while(PecReg != Pec); //If received and calculated CRC are equal go out from do-while{}
data = (DataH<<8) | DataL; //data=DataH:DataL
return data;
}
/*******************************************************************************
* Function Name : PEC_calculation
* Description : Calculates the PEC of received bytes
* Input : pec[]
* Output : None
* Return : pec[0]-this byte contains calculated crc value
*******************************************************************************/
u8 PEC_Calculation(u8 pec[])
{
u8 crc[6];
u8 BitPosition=47;
u8 shift;
u8 i;
u8 j;
u8 temp;
do
{
/*Load pattern value 0x000000000107*/
crc[5]=0;
crc[4]=0;
crc[3]=0;
crc[2]=0;
crc[1]=0x01;
crc[0]=0x07;
/*Set maximum bit position at 47 ( six bytes byte5...byte0,MSbit=47)*/
BitPosition=47;
/*Set shift position at 0*/
shift=0;
/*Find first "1" in the transmited message beginning from the MSByte byte5*/
i=5;
j=0;
while((pec[i]&(0x80>>j))==0 && i>0)
{
BitPosition--;
if(j<7)
{
j++;
}
else
{
j=0x00;
i--;
}
}/*End of while */
/*Get shift value for pattern value*/
shift=BitPosition-8;
/*Shift pattern value */
while(shift)
{
for(i=5; i<0xFF; i--)
{
if((crc[i-1]&0x80) && (i>0))
{
temp=1;
}
else
{
temp=0;
}
crc[i]<<=1;
crc[i]+=temp;
}/*End of for*/
shift--;
}/*End of while*/
/*Exclusive OR between pec and crc*/
for(i=0; i<=5; i++)
{
pec[i] ^=crc[i];
}/*End of for*/
}
while(BitPosition>8); /*End of do-while*/
return pec[0];
}
/*******************************************************************************
* Function Name : SMBus_ReadTemp
* Description : Calculate and return the temperature
* Input : None
* Output : None
* Return : SMBus_ReadMemory(0x00, 0x07)*0.02-273.15
*******************************************************************************/
float SMBus_ReadTemp(void)
{
float temp;
temp = SMBus_ReadMemory(SA, RAM_ACCESS|RAM_TOBJ1)*0.02-273.15;
return temp;
}
/**
* @brief 程序延时 us , 必须在 72M 主频下使用
* @param us: <= 4294967295
* @retval None
*/
void Coarse_delay_us(uint32_t us)
{
uint32_t delay = (HAL_RCC_GetHCLKFreq() / 4000000 * us);
while (delay--)
{
;
}
}
GY906.h
#ifndef __GY906_H
#define __GY906_H
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "gpio.h"
#define u8 uint8_t
#define u16 uint16_t
#define u32 uint32_t
void SMBus_StartBit(void);
void SMBus_StopBit(void);
void SMBus_SendBit(u8);
u8 SMBus_SendByte(u8);
u8 SMBus_ReceiveBit(void);
u8 SMBus_ReceiveByte(u8);
void SMBus_Delay(u32);
void SMBus_Init(void);
u16 SMBus_ReadMemory(u8, u8);
u8 PEC_Calculation(u8*);
float SMBus_ReadTemp(void);
void Coarse_delay_us(uint32_t us);
#endif
(5)usrat.c代码添加
/* USER CODE BEGIN 0 */
#include "stdio.h"
/* USER CODE END 0 */
/* USER CODE BEGIN 1 */
/*********************************************************
*
*重定义 fputc 函数
*
*********************************************************/
int fputc(int ch,FILE *f)
{
HAL_UART_Transmit (&huart1 ,(uint8_t *)&ch,1,HAL_MAX_DELAY );
return ch;
}
/* USER CODE END 1 */(6)main函数
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
float temp;
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
temp=SMBus_ReadTemp();
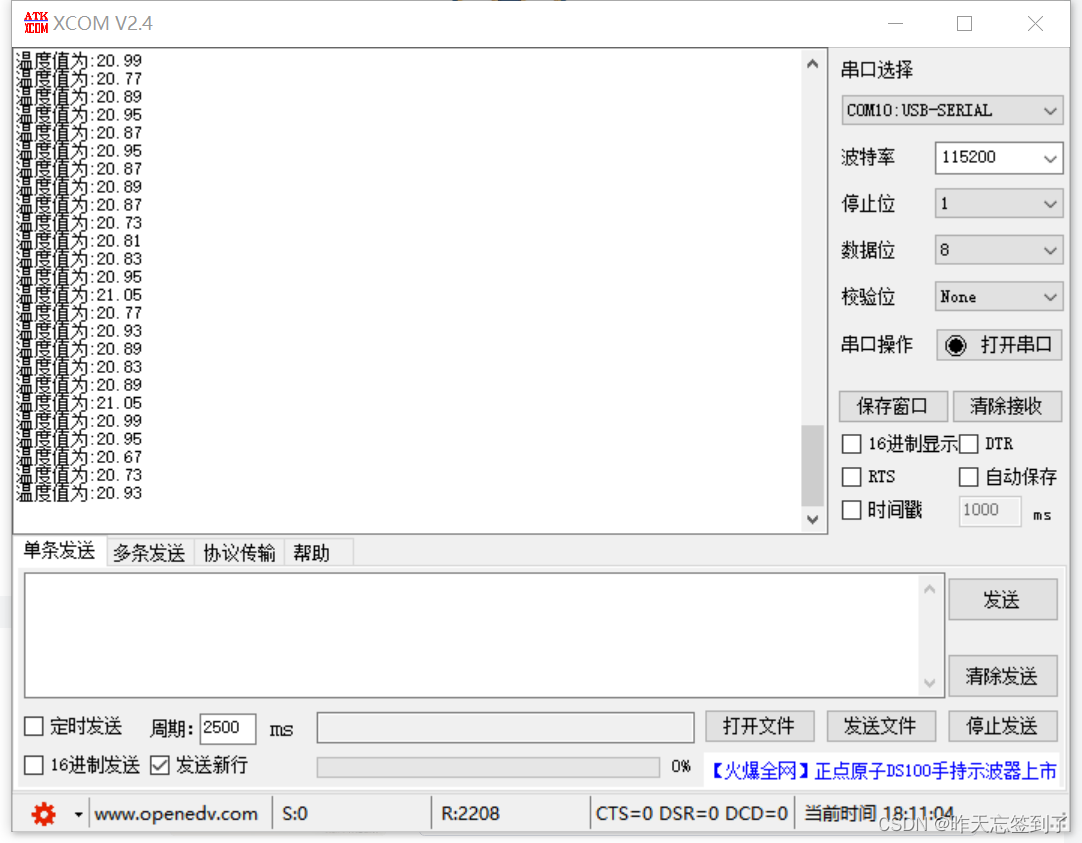
printf("温度值为:%.2f\r\n",temp);
HAL_Delay(1000);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
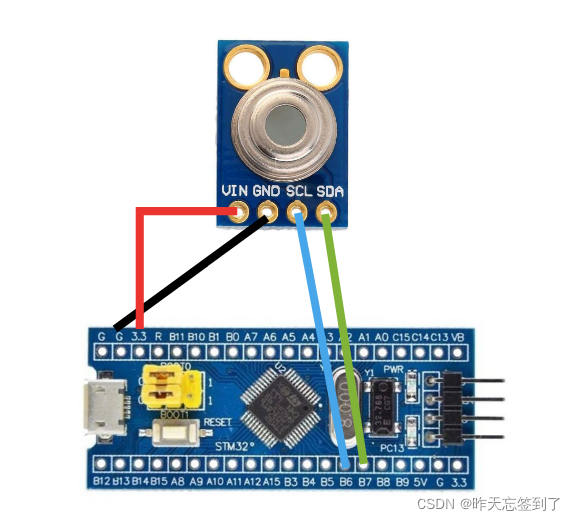
6.接线图及效果




















 1546
1546

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











