






一、前提条件
电脑已经安装好Docker
二、下载镜像
进入终端,输入指令:
删除文件大约5G,可以使用阿里云加速
三、进入终端
通指令查看Docker镜像名字:
docker images
获得镜像名字和ID:(图中registry开头)

通过下面指令运行终端(这一步要用root的权限进入容器内部)
sudo docker run -it --user=root registry.cn-hangzhou.aliyuncs.com/hnu_docker/hnu_docker:1.0 bash新开一个终端,先输入以下指令查看docker容器的ID
docker ps
根据ID或者容器名称,进入内部:(这里的sharp——engelbart为容器名字,视自己的情况选择)
docker exec -it --user=root sharp_engelbart bash
四、测试环境
1、px4
在上一个终端,输入指令进入px4文件夹并进行编译:
root@86d37a88e981:/# cd src/PX4-Autopilot/
root@86d37a88e981:/src/PX4-Autopilot# make px4_sitl gazebo-classic


出现这种px4启动成功。
2、通信
新开一个终端:
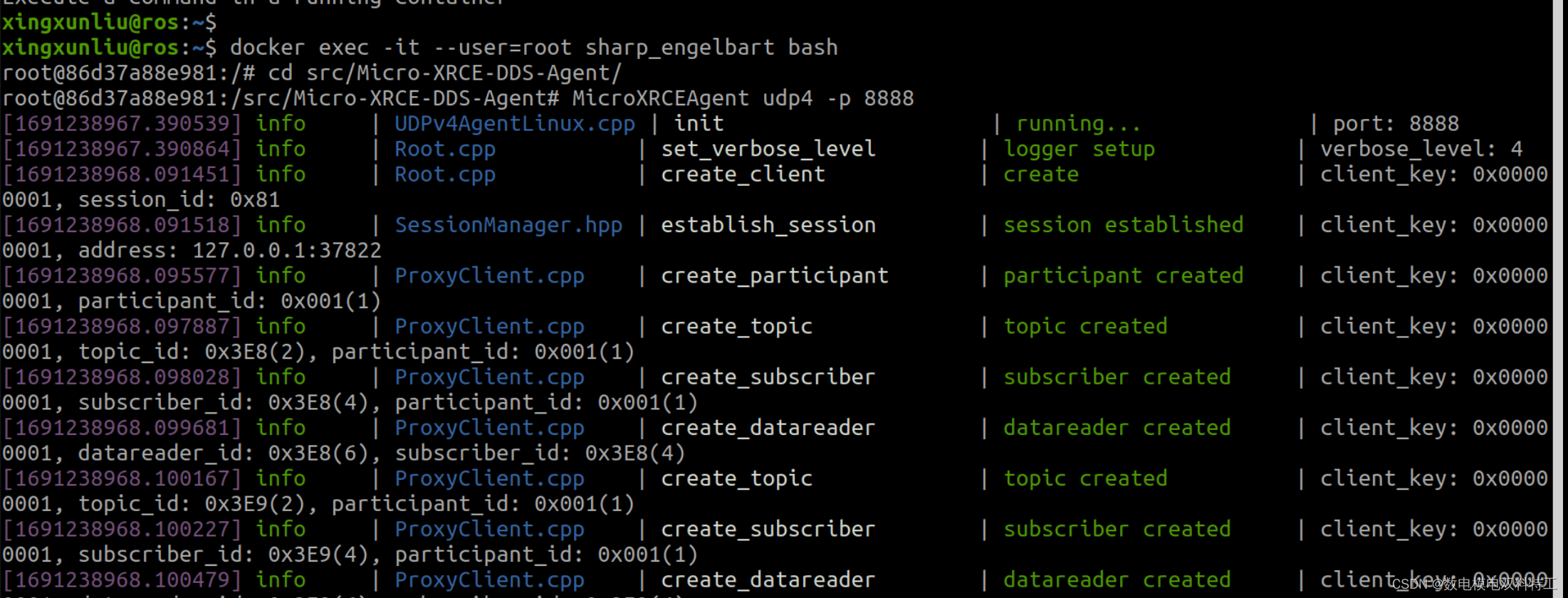
xingxunliu@ros:~$ docker exec -it --user=root sharp_engelbart bash
root@86d37a88e981:/# cd src/Micro-XRCE-DDS-Agent/
root@86d37a88e981:/src/Micro-XRCE-DDS-Agent# MicroXRCEAgent udp4 -p 8888
打开px4 和 ros2 的通信。
3、ros2
新开一个终端:
xingxunliu@ros:~$ docker exec -it --user=root sharp_engelbart bash
root@86d37a88e981:/# cd src/shared/px4_ros_com_ros2/
root@86d37a88e981:/src/shared/px4_ros_com_ros2# ros2 run px4_ros_com sensor_combined_listener
运行后可以得到无人机传感器信息:
















 3221
3221











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









