






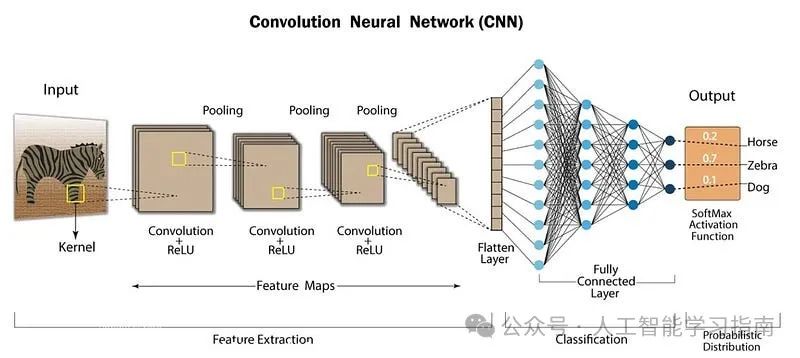
卷积神经网络(CNN)是一种专门用于计算机视觉领域的深度学习架构。
它由多层组成,这些层能够自动从输入数据中学习层次化的特征,从简单的边缘模式开始,逐步深入到更复杂的结构,从而支持图像分类和物体检测等任务。
CNN架构
为什么我们需要CNN?
假设我们有一个6x6的矩阵,代表图像中的数字1。
import numpy as np
number_1_matrix = np.array([
[0, 0, 1, 0, 0, 0],
[0, 1, 1, 0, 0, 0],
[1, 0, 1, 0, 0, 0],
[0, 0, 1, 0, 0, 0],
[0, 0, 1, 0, 0, 0],
[0, 0, 1, 0, 0, 0]
])
import matplotlib.pyplot as plt
plt.imshow(number_1_matrix, cmap='gray', interpolation='nearest')
plt.title("Visualization of Number 1 Matrix")
plt.axis('off')
plt.show()
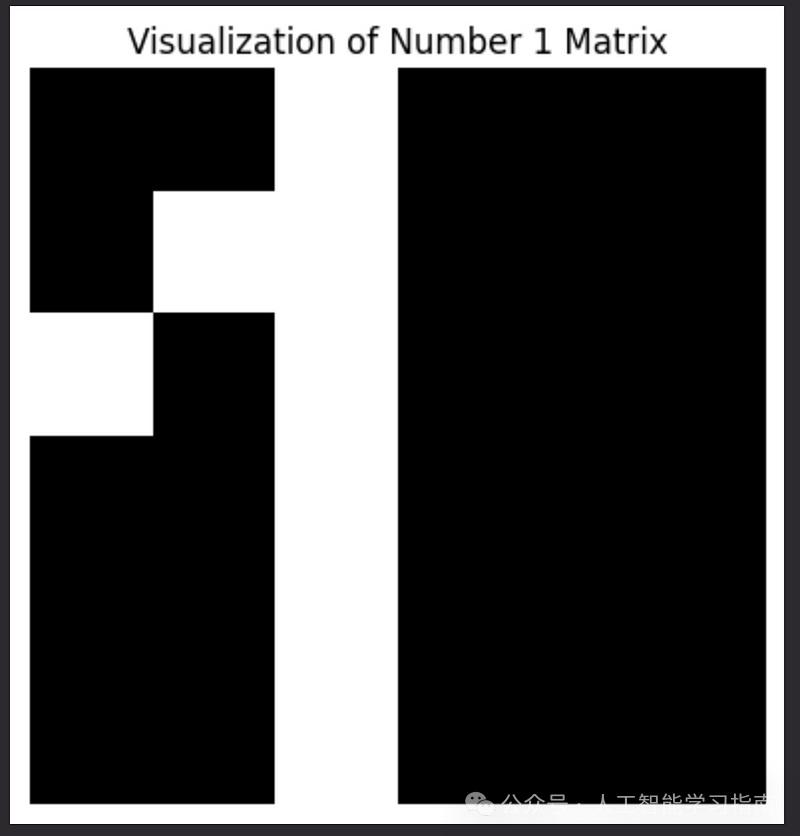
矩阵图
我们可以将这个矩阵转换为一列,作为常规神经网络的输入。
number_1_column = number_1_matrix.flatten().reshape(36, 1)
print(number_1_column)
"""
[[0]
[0]
[1]
[0]
[0]
[0]
[0]
[1]
[1]
[0]
[0]
[0]
[1]
[0]
[1]
[0]
[0]
[0]
[0]
[0]
[1]
[0]
[0]
[0]
[0]
[0]
[1]
[0]
[0]
[0]
[0]
[0]
[1]
[0]
[0]
[0]]
"""
但对于6x6的图像,隐藏层的每个节点都需要进行36次权重计算。
然而,6x6的图像与现实场景相比非常小,想象一下,如果是一个1000x1000的图像,那么隐藏层的一个神经元就需要进行1,000,000次权重计算,这还只是单通道(如黑白图像)的情况。
对于彩色图像,每个神经元则需要3,000,000次计算,这在现实中是巨大且不切实际的。
此外,常规神经网络不一定能很好地处理如此大的输入。例如,如果图像仅移动一个像素,就无法保证在原始图像上训练的模型能在移动后的图像上表现良好。
# Shifting the number 1 to the right by one pixel
shifted_number_1_matrix = np.roll(number_1_matrix, shift=1, axis=1)
plt.imshow(shifted_number_1_matrix, cmap='gray', interpolation='nearest')
plt.title("Visualization of Shifted Number 1 Matrix")
plt.axis('off')
plt.show()
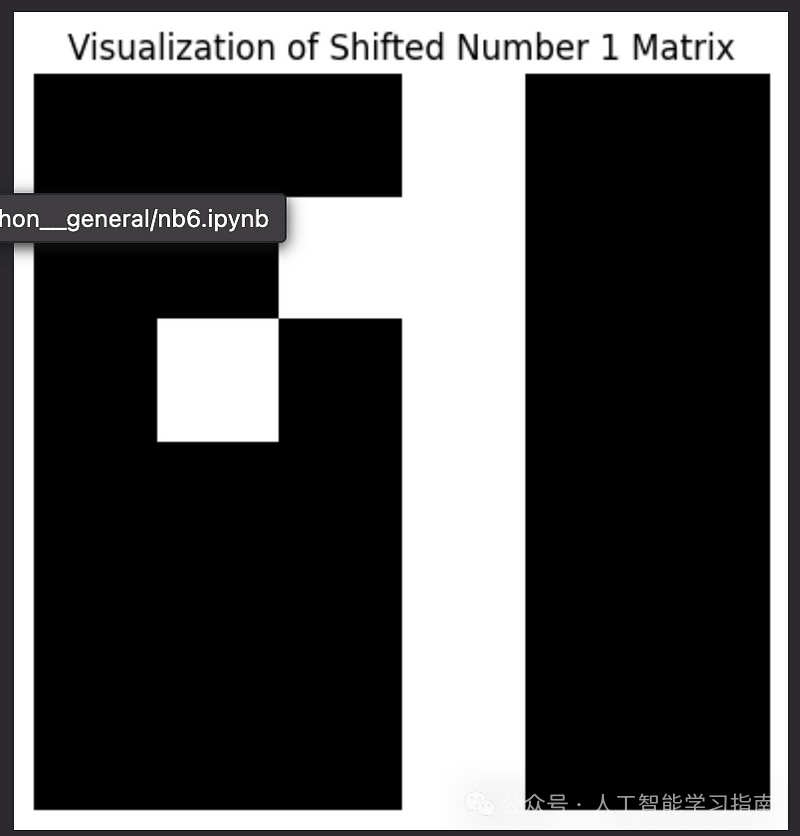
偏移矩阵图
在图像中,相邻像素往往具有相似的颜色或模式,如蓝天中的多个蓝色像素相邻。
卷积神经网络(CNN)通过一次关注图像的小部分区域,利用这些局部模式进行设计。
这有助于网络学习重要的特征,如边缘或形状,这些特征是理解和分类整个图像的关键,使得CNN在图像识别任务中非常有效。
CNN如何实现图像分类的实用性?
-
减少输入节点数量:通过关注图像的小部分区域,使模型更高效。
-
处理图像小位移:即使物体稍有移动,模型仍能识别。
-
利用图像中的自然模式和相关性:如相似像素的聚集,以更好地理解和分类内容。
针对所有自学遇到困难的同学们,我帮大家系统梳理大模型学习脉络,将这份 LLM大模型资料 分享出来:包括LLM大模型书籍、640套大模型行业报告、LLM大模型学习视频、LLM大模型学习路线、开源大模型学习教程等, 😝有需要的小伙伴,可以 扫描下方二维码领取🆓↓↓↓
👉[CSDN大礼包🎁:全网最全《LLM大模型入门+进阶学习资源包》免费分享(安全链接,放心点击)]()👈
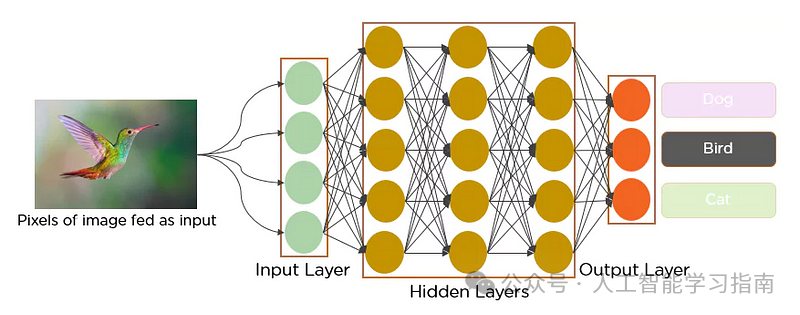
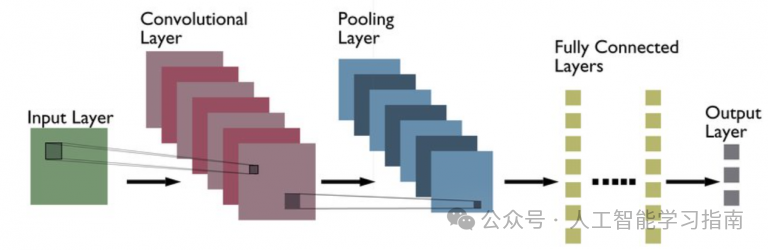
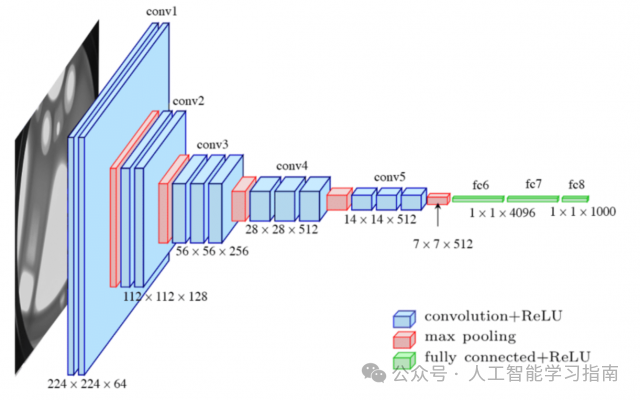
架构概览
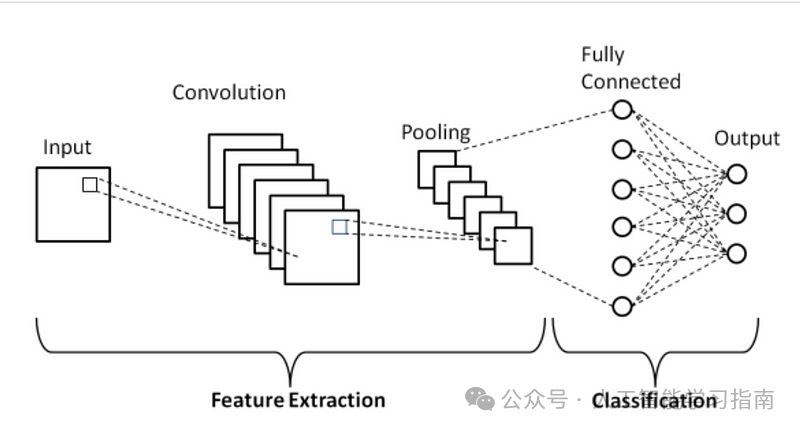
基础卷积神经网络(CNN)架构示意图
我们的输入层以数组的形式接收图像的像素作为输入。
卷积神经网络(CNN)首先执行的操作是滤波,这些滤波器作为滑动窗口在图像上移动,负责检测图像中的特征或模式。
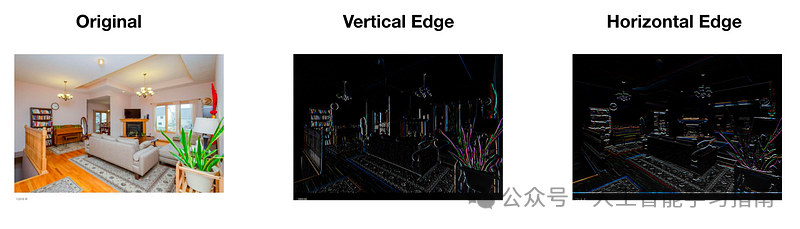
边缘检测示例
检测到的这些特征会被传递到后续层,后续层可以进一步识别出标签。
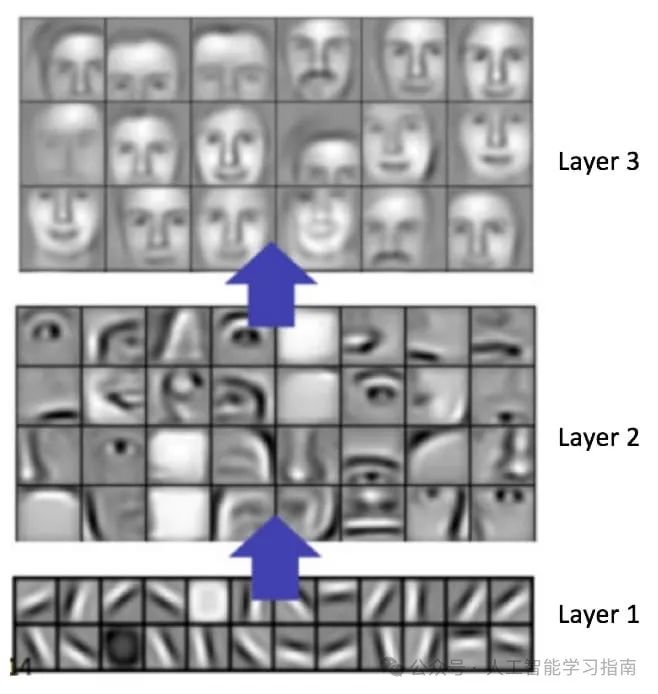
各层特征图
在卷积步骤中,滤波器被应用于输入图像,以创建特征图,这些特征图会突出显示重要的模式。
随后,ReLU(线性整流函数)通过将特征图中的负值替换为零来引入非线性。
池化操作则减少了特征图的空间大小,保留了最重要的信息,同时降低了计算复杂度。
展平操作将二维特征图转换为一维向量,以便为全连接层做准备。
全连接层将所有特征组合起来进行预测,该层中的每个神经元都与下一层中的每个神经元相连。
最后,输出层根据当前任务生成最终的分类或回归结果。
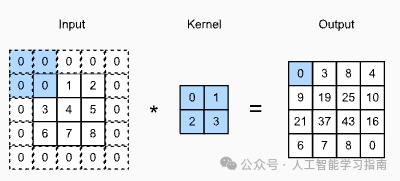
卷积操作
卷积步骤是CNN的核心,用于检测图像中的重要特征,如边缘。
在此步骤中,一个滤波器(通常为3x3像素的小矩阵)在图像上滑动以捕捉模式。
滤波器中的值在训练过程中通过反向传播进行调整,使网络能够学习识别不同物体所需的最重要模式。
现在,让我们对之前提到的6x6矩阵应用一个滤波器。
我们将使用经典的垂直边缘检测滤波器——Sobel滤波器。
# Define a classical vertical edge detection filter (Sobel filter)
vertical_edge_filter = np.array([
[-1, 0, 1],
[-2, 0, 2],
[-1, 0, 1]
])
# Get the dimensions of the matrix and filter
matrix_height, matrix_width = number_1_matrix.shape
filter_height, filter_width = vertical_edge_filter.shape
# Calculate output dimensions
output_height = matrix_height - filter_height + 1
output_width = matrix_width - filter_width + 1
# Initialize the output matrix
convolution_output = np.zeros((output_height, output_width))
# Apply the convolution operation
for i in range(output_height):
for j in range(output_width):
region = number_1_matrix[i:i+filter_height, j:j+filter_width]
convolution_output[i, j] = np.sum(region * vertical_edge_filter)
convolution_output
"""
array([[ 3., -2., -4., 0.],
[ 2., -1., -4., 0.],
[ 3., 0., -4., 0.],
[ 4., 0., -4., 0.]])
"""
应用3x3滤波器后,结果是一个4x4的矩阵。
(n x n) * (f x f) = (n — f + 1) x (n — f + 1)
import matplotlib.pyplot as plt
# Display the original matrix
plt.subplot(1, 2, 1)
plt.imshow(number_1_matrix, cmap='gray', interpolation='nearest')
plt.title("Original Number 1 Matrix")
plt.axis('off')
# Display the convolution result
plt.subplot(1, 2, 2)
plt.imshow(convolution_output, cmap='gray', interpolation='nearest')
plt.title("Vertical Edge Detection")
plt.axis('off')
plt.show()
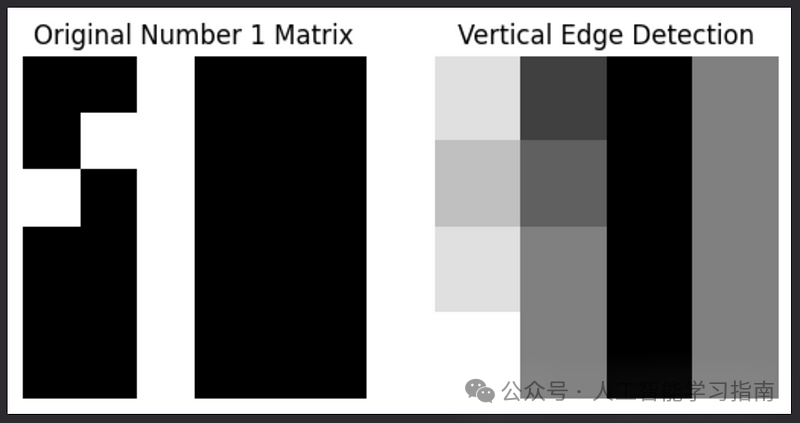
垂直边缘检测
在CNN的单层中,我们使用多个滤波器,每个滤波器检测图像的不同特征。
例如,一个滤波器可能检测水平边缘,另一个检测垂直边缘,还有一个可能检测圆形。
如果我们在一层中使用c个滤波器,那么对于灰度图像来说,其输出结果将是:
(n x n x 1) * (f x f x c) = (n — f + 1) x (n — f + 1) x c
对于彩色图像,我们有3个通道。对于单个滤波器而言:
(n x n x 1) * (f x f x 3) = (n — f + 1) x (n — f + 1) x 1
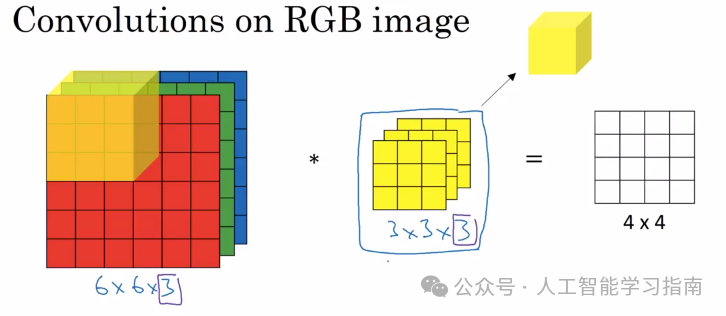
在卷积神经网络(CNN)中,当我们对图像应用滤波器时,实际上是在用一个小网格(即滤波器)扫描图像,以寻找特定的模式,如边缘或纹理。
每次滤波器在图像上移动到一个新位置时,它都会检查该部分图像与滤波器中的模式匹配程度如何。
这个过程会产生一个新的图像,称为特征图,它标出了原始图像中这些模式出现的位置。
特征图通过关注相互协作的邻近像素组,帮助网络理解和检测图像中的重要特征。
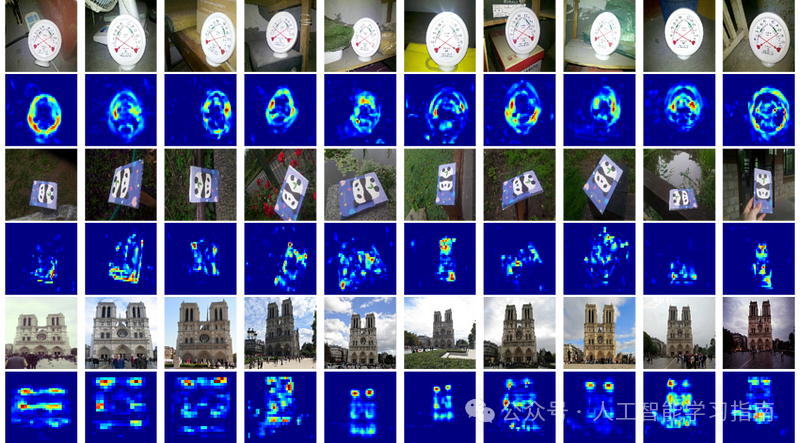
合并特征图的可视化
填充与步长
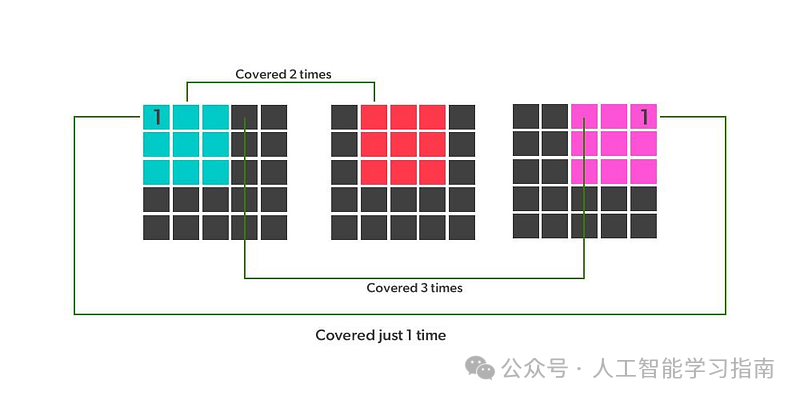
在卷积操作前,我们会在输入图像的边缘添加额外的像素,这一过程称为填充。
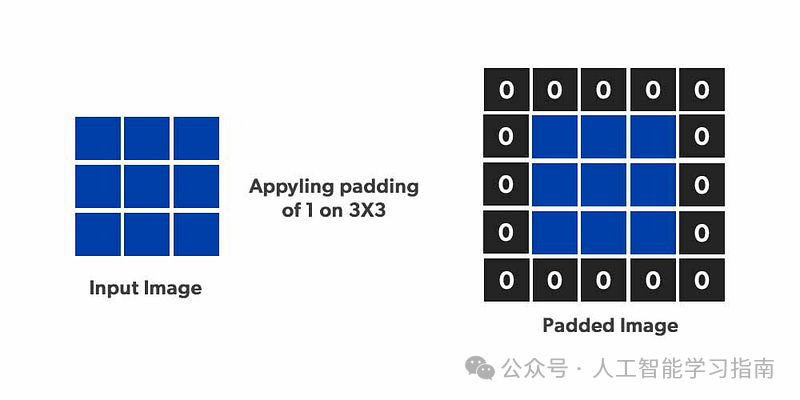
填充(Padding)示意图
进行填充主要有两大原因:
-
边缘应用:填充允许卷积核应用到图像的边缘。没有填充时,卷积核只能完全作用于图像的内部区域(对于角落仅一次,边缘则次数较少)。
-
保持尺寸:每次卷积操作都会减小图像的大小。填充有助于保持输出特征图与输入图像尺寸相同。
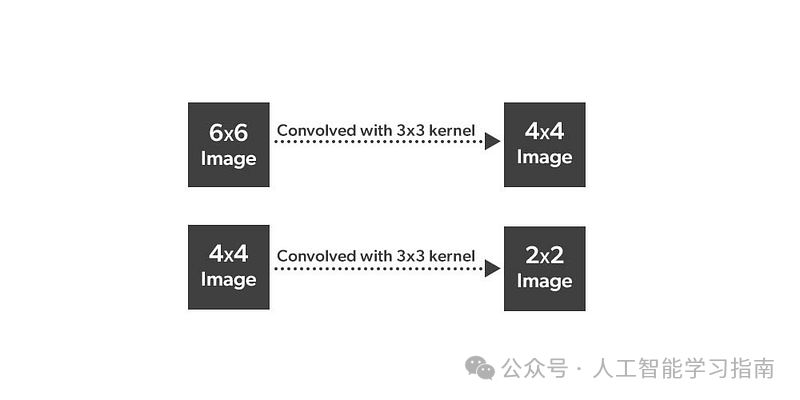
带填充的二维互相关运算
有效卷积:不添加填充,输出尺寸较小。
相同卷积:添加填充,输出尺寸与输入相同。其中,所需填充量p与卷积核大小f的关系为:
p = (f - 1) / 2。
步长:卷积过程中,卷积核在图像上每次移动的像素数。
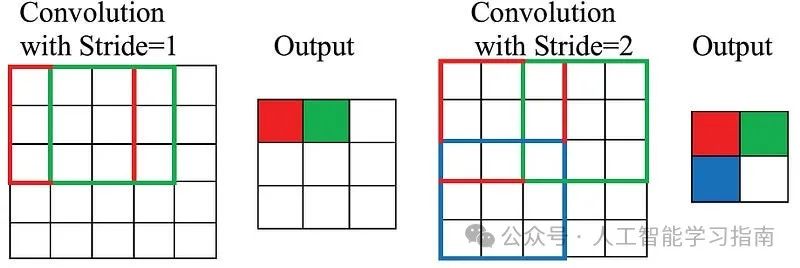
步长
若步长大于1,则卷积核会跳过一些像素,这样做既减小了输出特征图的尺寸,也使网络对图像中的微小偏移或细节不那么敏感。
-
填充帮助保持输出尺寸并捕获边缘信息。
-
步长控制卷积核在图像上的移动方式,影响特征图的尺寸和细节层次。
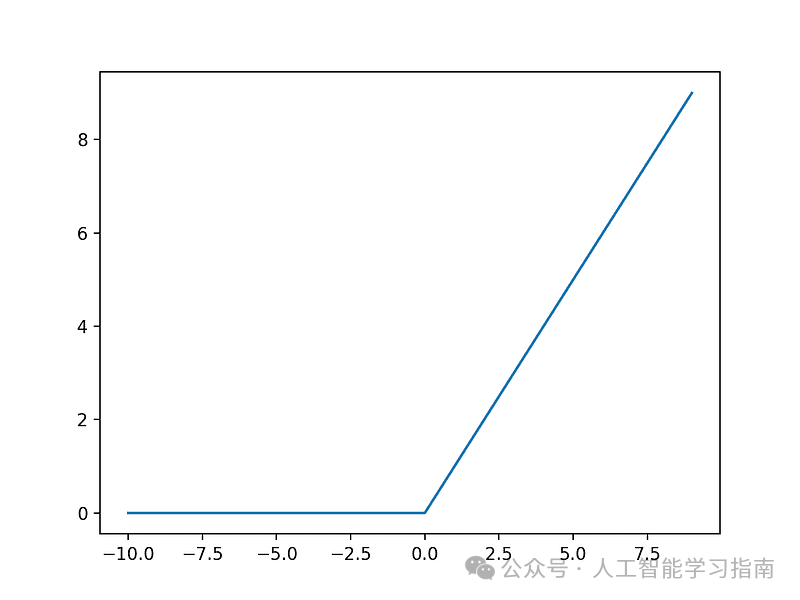
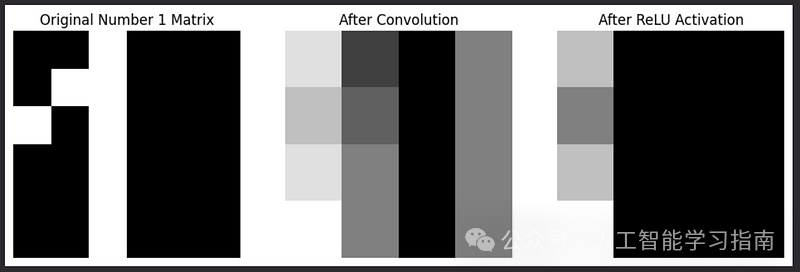
R eLU激活函数
卷积生成特征图后,通常会应用ReLU激活函数。ReLU即线性整流单元。
其操作简单:将特征图中的所有负值置为零,正值保持不变。这有助于网络仅关注重要特征(正值),并引入非线性,使模型能够学习更复杂的模式。
ReLU激活函数
import numpy as np
import matplotlib.pyplot as plt
number_1_matrix = np.array([
[0, 0, 1, 0, 0, 0],
[0, 1, 1, 0, 0, 0],
[1, 0, 1, 0, 0, 0],
[0, 0, 1, 0, 0, 0],
[0, 0, 1, 0, 0, 0],
[0, 0, 1, 0, 0, 0]
])
vertical_edge_filter = np.array([
[-1, 0, 1],
[-2, 0, 2],
[-1, 0, 1]
])
# Get the dimensions of the matrix and filter
matrix_height, matrix_width = number_1_matrix.shape
filter_height, filter_width = vertical_edge_filter.shape
# Calculate output dimensions
output_height = matrix_height - filter_height + 1
output_width = matrix_width - filter_width + 1
# Initialize the output matrix
convolution_output = np.zeros((output_height, output_width))
# Apply the convolution operation
for i in range(output_height):
for j in range(output_width):
region = number_1_matrix[i:i+filter_height, j:j+filter_width]
convolution_output[i, j] = np.sum(region * vertical_edge_filter)
# Apply ReLU activation function
relu_output = np.maximum(convolution_output, 0)
# Display the original matrix, convolution result, and ReLU result
plt.figure(figsize=(12, 4))
plt.subplot(1, 3, 1)
plt.imshow(number_1_matrix, cmap='gray', interpolation='nearest')
plt.title("Original Number 1 Matrix")
plt.axis('off')
plt.subplot(1, 3, 2)
plt.imshow(convolution_output, cmap='gray', interpolation='nearest')
plt.title("After Convolution")
plt.axis('off')
plt.subplot(1, 3, 3)
plt.imshow(relu_output, cmap='gray', interpolation='nearest')
plt.title("After ReLU Activation")
plt.axis('off')
plt.show()
最大池化
接下来,对卷积和ReLU步骤生成的特征图应用另一滤波器,该滤波器通常不重叠(步长大于1)地移动。
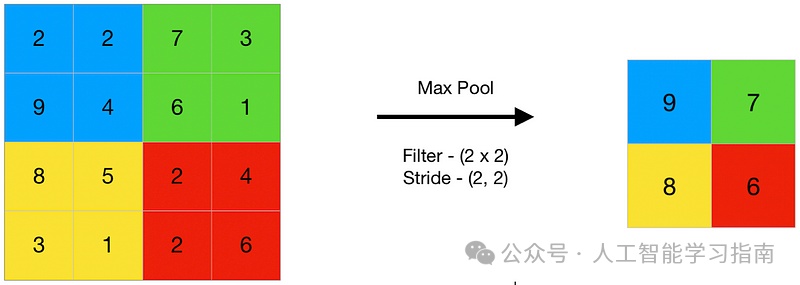
最大池化
这一过程称为池化,是一种下采样操作。
最大池化(Max Pooling)是在每个窗口位置选择该窗口内的最大值,并将其置于池化后的特征图中。
def max_pooling(feature_map, size=2, stride=2):
# Get dimensions of the feature map
h, w = feature_map.shape
output_height = (h - size) // stride + 1
output_width = (w - size) // stride + 1
# Initialize the pooled output
pooled_output = np.zeros((output_height, output_width))
# Apply max pooling
for i in range(0, h - size + 1, stride):
for j in range(0, w - size + 1, stride):
pooled_output[i//stride, j//stride] = np.max(feature_map[i:i+size, j:j+size])
return pooled_output
max_pooled_output = max_pooling(relu_output)
plt.figure(figsize=(8, 4))
plt.subplot(1, 2, 1)
plt.imshow(relu_output, cmap='gray', interpolation='nearest')
plt.title("After ReLU Activation")
plt.axis('off')
plt.subplot(1, 2, 2)
plt.imshow(max_pooled_output, cmap='gray', interpolation='nearest')
plt.title("After Max Pooling")
plt.axis('off')
plt.show()

最大池化后
最大值代表滤波器在该区域检测到的最显著特征或“工作效果最佳”的位置。
最大池化保留了最强的激活,即滤波器检测到的最重要特征。
减少空间维度:降低特征图的高度和宽度,从而减少网络中的参数和计算量,有助于防止过拟合并加快处理速度。
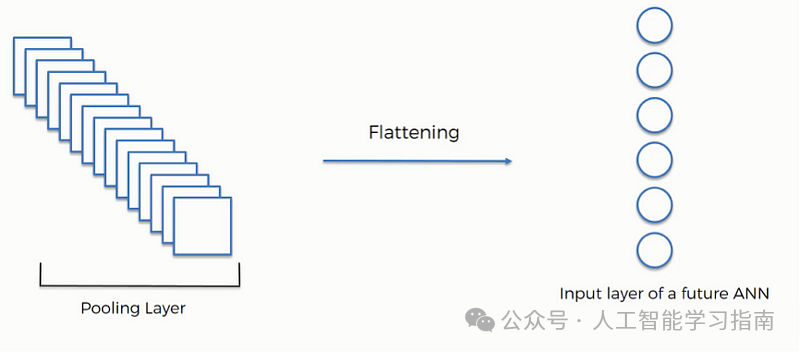
展平
展平是将所有池化后的特征图(二维数组)转换为单个长的一维连续向量的过程。
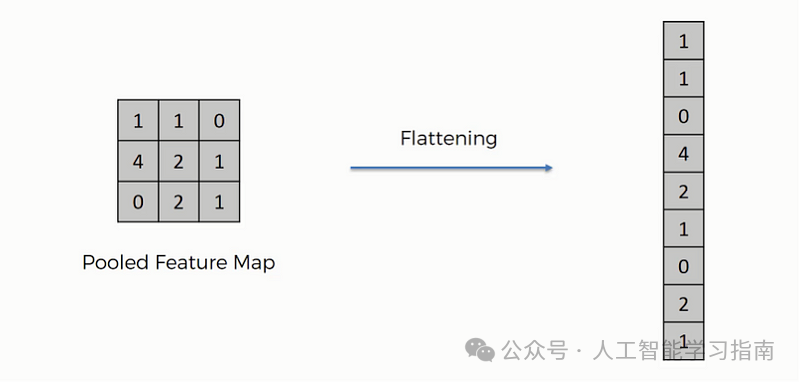
展平操作
这一转换是必要的,因为后续的全连接层(密集层)需要一维的输入形式。
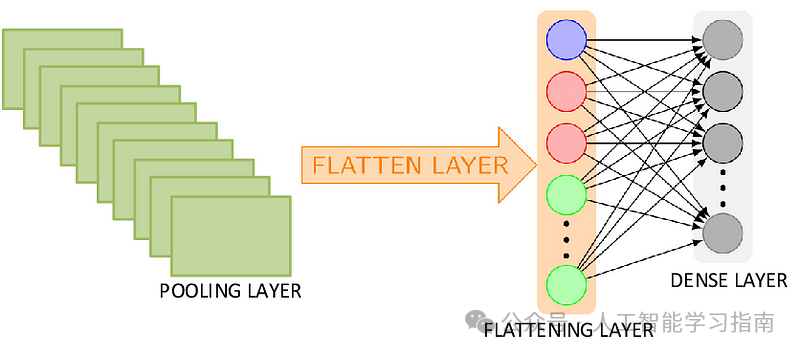
展平层
全连接层
全连接层结合卷积层和池化层学习到的特征来做出最终预测。在全连接层中,每个神经元都与前一层的每个神经元相连,这种密集连接允许该层考虑前一层特征的所有可能组合。

全连接层
输出层
输出层是网络的最后一层,提供预测或分类结果。
对于分类任务,神经元的数量等于可能的类别数。
输出层常使用softmax激活函数,将最后一个全连接层的原始输出值(称为logits)转换为概率分布。
反向传播
在前向传播中生成输出后,使用损失函数将输出与实际目标标签进行比较,生成一个表示网络预测总误差的标量值。
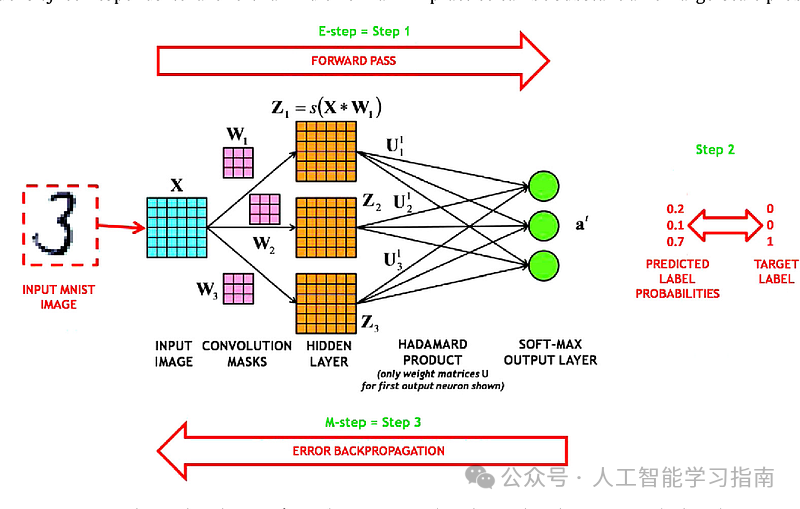
反向传播的目标是最小化这个损失,为此,网络计算损失函数关于网络中每个权重和偏置的梯度。
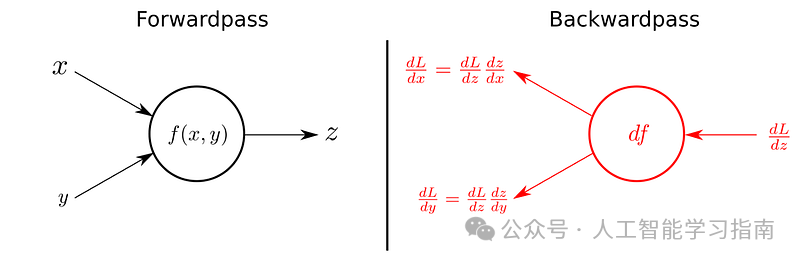
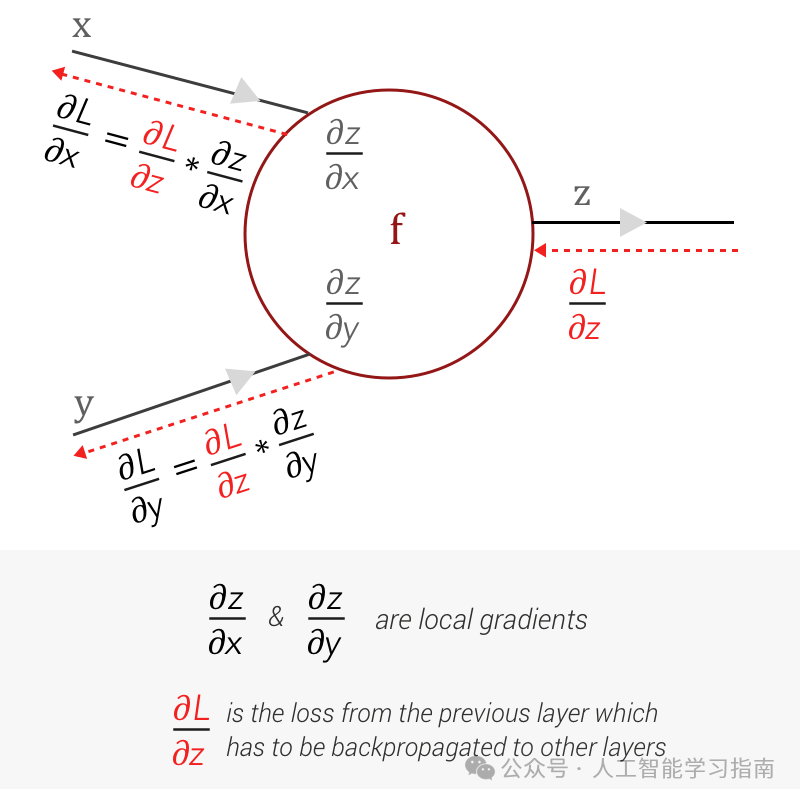
在卷积层中,梯度不仅针对卷积核的权重计算,还针对该层输入的像素计算。
池化层通常没有权重,因此梯度会直接通过,简单地回传到前向传播中它们来自的位置。
在全连接层中,梯度的计算与标准神经网络类似。
概述
-
卷积:检测特征。
-
填充与步长:控制尺寸和位置。
-
ReLU:保留重要值。
-
最大池化:减小数据尺寸。
-
展平:将数据准备为一维形式。
-
全连接层:进行预测。
-
输出层:给出最终结果。
-
反向传播:通过减少误差来训练网络。
Python实现示例
您可以在这里下载数据集。
# Load data
X_train = np.loadtxt("Image Classification CNN Keras Dataset/input.csv", delimiter=",")
y_train = np.loadtxt("Image Classification CNN Keras Dataset/labels.csv", delimiter=",")
X_test = np.loadtxt("Image Classification CNN Keras Dataset/input_test.csv", delimiter=",")
y_test = np.loadtxt("Image Classification CNN Keras Dataset/labels_test.csv", delimiter=",")
print("X_train shape:", X_train.shape)
print("y_train shape:", y_train.shape)
print("X_test shape:", X_test.shape)
print("y_test shape:", y_test.shape)
"""
X_train shape: (2000, 30000)
y_train shape: (2000,)
X_test shape: (400, 30000)
y_test shape: (400,)
"""
# We need to process data.
X_train = X_train.reshape(len(X_train), 100, 100, 3)
X_test = X_test.reshape(len(X_test), 100, 100, 3)
y_train = y_train.reshape(len(y_train), 1)
y_test = y_test.reshape(len(y_test), 1)
print("X_train shape:", X_train.shape)
print("y_train shape:", y_train.shape)
print("X_test shape:", X_test.shape)
print("y_test shape:", y_test.shape)
"""
X_train shape: (2000, 100, 100, 3)
y_train shape: (2000, 1)
X_test shape: (400, 100, 100, 3)
y_test shape: (400, 1)
"""
X_train = X_train / 255.0
X_test = X_test / 255.0
数据集的形状为(2000, 30000),这表示有2000个训练样本,每个样本由30,000个特征表示(这些特征对应于一个扁平化的图像)。
接下来,我们将这些图像数据重新塑形为4维数组,其中,100, 100, 3分别代表图像的高度、宽度和颜色通道数。
重塑后,X_train的形状变为(2000, 100, 100, 3),意味着有2000张图像,每张图像的大小为100x100像素,且包含3个颜色通道。
然后,我们将图像的像素值除以255,以便将它们的值从0-255(图像数据的典型范围)缩放到0-1之间。
plt.imshow(X_train[0,:])
plt.show()
# the model architecture
model = Sequential()
model.add(Conv2D(32, (3, 3), activation='relu', input_shape=(100, 100, 3)))
model.add(MaxPooling2D((2, 2)))
model.add(Conv2D(64, (3, 3), activation='relu'))
model.add(MaxPooling2D((2, 2)))
model.add(Flatten())
model.add(Dense(128, activation='relu'))
model.add(Dropout(0.5))
model.add(Dense(1, activation='sigmoid'))
接下来,我们开始训练模型。
model.compile(loss='binary_crossentropy', optimizer='adam', metrics=['accuracy'])
history = model.fit(X_train, y_train, epochs=15, batch_size=32)
"""
Epoch 1/15
63/63 [==============================] - 3s 34ms/step - loss: 1.0101 - accuracy: 0.5140
Epoch 2/15
63/63 [==============================] - 2s 36ms/step - loss: 0.7403 - accuracy: 0.5360
Epoch 3/15
63/63 [==============================] - 2s 34ms/step - loss: 0.6731 - accuracy: 0.5875
Epoch 4/15
63/63 [==============================] - 2s 31ms/step - loss: 0.6214 - accuracy: 0.6725
Epoch 5/15
63/63 [==============================] - 2s 31ms/step - loss: 0.5658 - accuracy: 0.7055
Epoch 6/15
63/63 [==============================] - 2s 32ms/step - loss: 0.5183 - accuracy: 0.7555
Epoch 7/15
63/63 [==============================] - 2s 32ms/step - loss: 0.4621 - accuracy: 0.7855
Epoch 8/15
63/63 [==============================] - 2s 33ms/step - loss: 0.4077 - accuracy: 0.8125
Epoch 9/15
63/63 [==============================] - 2s 32ms/step - loss: 0.3721 - accuracy: 0.8405
Epoch 10/15
63/63 [==============================] - 2s 33ms/step - loss: 0.3268 - accuracy: 0.8530
Epoch 11/15
63/63 [==============================] - 2s 34ms/step - loss: 0.3094 - accuracy: 0.8745
Epoch 12/15
63/63 [==============================] - 2s 32ms/step - loss: 0.2918 - accuracy: 0.8900
Epoch 13/15
63/63 [==============================] - 2s 32ms/step - loss: 0.2383 - accuracy: 0.9060
Epoch 14/15
63/63 [==============================] - 2s 33ms/step - loss: 0.2307 - accuracy: 0.9220
Epoch 15/15
63/63 [==============================] - 2s 32ms/step - loss: 0.2440 - accuracy: 0.9250
在最后一个训练周期中,我们达到了0.9250的准确率。现在,让我们来评估测试数据的表现。
model.evaluate(X_test, y_test)
"""
[1.631995439529419, 0.6424999833106995]
"""
# [loss, accuracy]
测试数据上的准确率为0.64。这显然是一个过拟合的情况:)
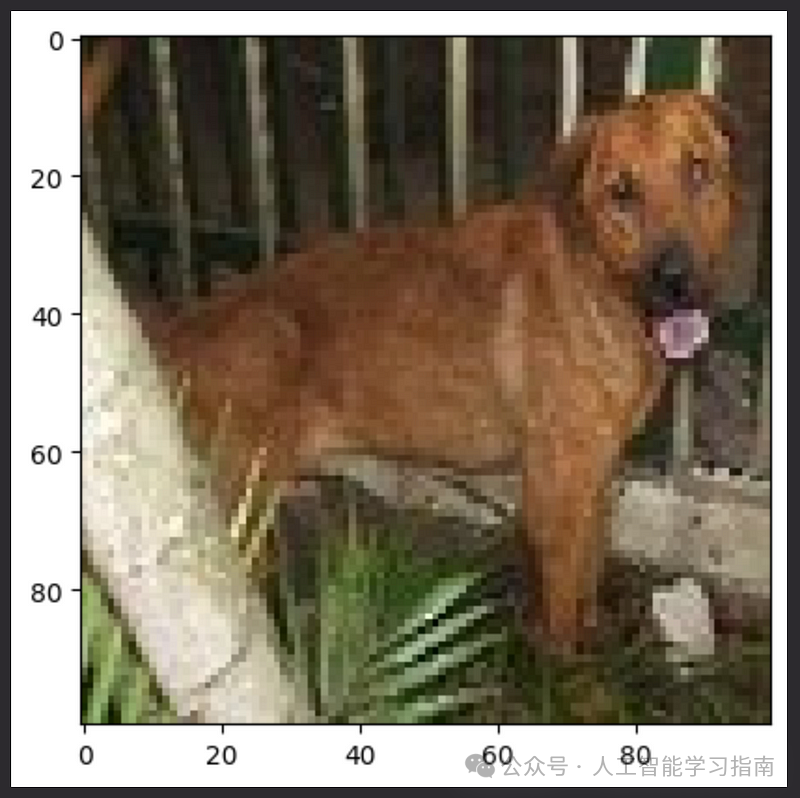
最后,让我们进行预测。
plt.imshow(X_test[3, :])
plt.show()
y_pred = model.predict(X_test[3, :].reshape(1, 100, 100, 3))
if y_pred[0][0] > 0.5:
pred = "Cat"
else:
pred = "Dog"
print(y_pred)
print(pred)
"""
1/1 [==============================] - 0s 15ms/step
[[0.00018852]]
Dog
"""
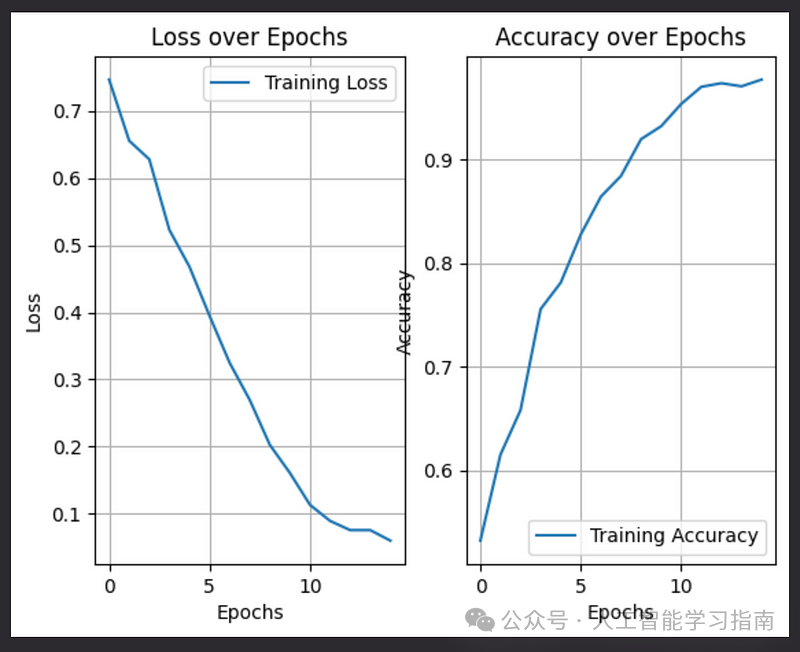
# Plot the loss
plt.subplot(1, 2, 1)
plt.plot(history.history['loss'], label='Training Loss')
plt.title('Loss over Epochs')
plt.xlabel('Epochs')
plt.ylabel('Loss')
plt.legend()
plt.grid(True)
# Plot the accuracy
plt.subplot(1, 2, 2)
plt.plot(history.history['accuracy'], label='Training Accuracy')
plt.title('Accuracy over Epochs')
plt.xlabel('Epochs')
plt.ylabel('Accuracy')
plt.legend()
plt.grid(True)
plt.show()
读者福利:如果大家对大模型感兴趣,这套大模型学习资料一定对你有用
对于0基础小白入门:
如果你是零基础小白,想快速入门大模型是可以考虑的。
一方面是学习时间相对较短,学习内容更全面更集中。
二方面是可以根据这些资料规划好学习计划和方向。
包括:大模型学习线路汇总、学习阶段,大模型实战案例,大模型学习视频,人工智能、机器学习、大模型书籍PDF。带你从零基础系统性的学好大模型!
😝有需要的小伙伴,可以保存图片到wx扫描二v码免费领取【保证100%免费】🆓
👉AI大模型学习路线汇总👈
大模型学习路线图,整体分为7个大的阶段:(全套教程文末领取哈)

第一阶段: 从大模型系统设计入手,讲解大模型的主要方法;
第二阶段: 在通过大模型提示词工程从Prompts角度入手更好发挥模型的作用;
第三阶段: 大模型平台应用开发借助阿里云PAI平台构建电商领域虚拟试衣系统;
第四阶段: 大模型知识库应用开发以LangChain框架为例,构建物流行业咨询智能问答系统;
第五阶段: 大模型微调开发借助以大健康、新零售、新媒体领域构建适合当前领域大模型;
第六阶段: 以SD多模态大模型为主,搭建了文生图小程序案例;
第七阶段: 以大模型平台应用与开发为主,通过星火大模型,文心大模型等成熟大模型构建大模型行业应用。
👉大模型实战案例👈
光学理论是没用的,要学会跟着一起做,要动手实操,才能将自己的所学运用到实际当中去,这时候可以搞点实战案例来学习。

👉大模型视频和PDF合集👈
观看零基础学习书籍和视频,看书籍和视频学习是最快捷也是最有效果的方式,跟着视频中老师的思路,从基础到深入,还是很容易入门的。


👉学会后的收获:👈
• 基于大模型全栈工程实现(前端、后端、产品经理、设计、数据分析等),通过这门课可获得不同能力;
• 能够利用大模型解决相关实际项目需求: 大数据时代,越来越多的企业和机构需要处理海量数据,利用大模型技术可以更好地处理这些数据,提高数据分析和决策的准确性。因此,掌握大模型应用开发技能,可以让程序员更好地应对实际项目需求;
• 基于大模型和企业数据AI应用开发,实现大模型理论、掌握GPU算力、硬件、LangChain开发框架和项目实战技能, 学会Fine-tuning垂直训练大模型(数据准备、数据蒸馏、大模型部署)一站式掌握;
• 能够完成时下热门大模型垂直领域模型训练能力,提高程序员的编码能力: 大模型应用开发需要掌握机器学习算法、深度学习框架等技术,这些技术的掌握可以提高程序员的编码能力和分析能力,让程序员更加熟练地编写高质量的代码。
👉获取方式:
😝有需要的小伙伴,可以保存图片到wx扫描二v码免费领取【保证100%免费】🆓
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










{kind=link}